海洋牧场网衣清刷机器人的制作方法
1.本实用新型涉及机器人技术领域,具体是一种海洋牧场网衣清刷机器人。
背景技术:
2.近年来现代海洋牧场得到了快速发展,截至2019 年1月1日我国农业农村 部共批准了86家国家级海洋牧场示范区,计划至2025年将中国沿海的国家级海洋牧场示范区增加到178个,将海洋牧场覆盖海域的面积增加至2700平方公里。
3.针对海洋牧场网衣上将生长大量的海藻,藤壶等贝壳类生物,若无法及时清理这些生物,将导致网眼堵塞,水体含氧量下降,网衣质量增加,网衣变形等。加之海水养殖作物具有死亡速度快的特点,一旦错失及时的清洁维护时间,海洋牧场就会失去其相应的经济效益、环境效益、生态效益,甚至威胁海洋生态平衡,加剧海洋“荒漠化”。
4.国外海洋牧场清刷技术起步较早,清刷方式主要为高压水清刷,国内起步较晚,海洋牧场网衣清刷是亟待解决的问题,目前采用的清刷方式还是人工清刷;或对网衣采取防护措施,如:对网衣表面涂一层防生物附着料,定期换网。
5.但人工清刷存在的安全风险和极大的难度,以及清刷成本。除采用清刷方式外,其他防护措施如:对网衣表面涂一层防生物附着料,定期换网,这些方法要么不能够从根本上解决网衣上附着生物的问题,要么清理海洋生物的措施存在成本高的问题。
技术实现要素:
6.本实用新型的目的在于提供一种海洋牧场网衣清刷机器人,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种海洋牧场网衣清刷机器人,包括机架、行走机构、旋转清刷机构、螺旋桨推力机构和监控机构,所述行走机构安装在所述机架的两侧端面,用于带动机架在待清刷面行走;至少一个所述旋转清刷机构和螺旋桨推力机构分别安装在所述机架朝向、背离所述待清刷面的一侧;所述旋转清刷机构用于清理机架行走通过的待清刷面,所述螺旋桨推力机构用于调节机架的位姿;所述监控机构用于监控行走机构的运动情况,并根据监控信息控制行走机构、旋转清刷机构、螺旋桨推力机构的工作。
9.作为本实用新型进一步的方案:所述机架包括支撑件、安装件,至少两个所述安装件通过所述支撑件相对设置。
10.作为本实用新型再进一步的方案:所述安装件之间设有为机架提供浮力的浮体组。
11.作为本实用新型再进一步的方案:所述行走机构包括行走驱动件和履带组,若干所述履带组两两相对安装在所述机架的两侧端面,同侧的履带组通过传动带连接,所述行走驱动件与所述履带组同轴心安装,所述行走驱动件带动履带组转动。
12.作为本实用新型再进一步的方案:所述机架上安装有与所述传动带连接的调节
件,通过所述调节件调节传动带的张紧力。
13.作为本实用新型再进一步的方案:所述旋转清刷机构包括清刷驱动件、与所述清刷驱动件传动连接的轴承安装在所述机架上的清刷盘,所述清刷盘上安装有至少两组喷嘴组,所述喷嘴组通过连接管路连接有高压水供给端,所述清刷驱动件带动清刷盘转动以使所述喷嘴组产生空化射流。
14.作为本实用新型再进一步的方案:所述喷嘴组至少包括两个喷嘴,且两个所述喷嘴的喷水方向具有夹角。
15.作为本实用新型再进一步的方案:部分所述螺旋桨推力机构呈矩形或方形安装在所述行走机构中部的机架上,另一部分所述螺旋桨推力机构设置在所述的部分所述螺旋桨推力机构的几何中心。
16.作为本实用新型再进一步的方案:所述监控机构包括控制模块、与控制模块连接的摄像模块和供电模块,所述摄像模块用于监控行走机构的运动情况并传输给控制模块,所述控制模块根据摄像模块传输的监控信息控制行走机构、旋转清刷机构、螺旋桨推力机构的工作,所述供电模块提供电能。
17.作为本实用新型再进一步的方案:所述控制模块通讯连接有远程操作端,所述远程操作端通过控制模块遥控海洋牧场网衣清刷机器人的工作。
18.与现有技术相比,本实用新型的有益效果是:设置的螺旋桨推力机构可以在较恶劣条件下保证机器人的运动稳定性,同时通过控制部分螺旋桨推力机构的正、反转调整机器人在水下的姿态;行走机构的行走方式顺应网衣,质地柔软,不会对网衣造成破坏;旋转清刷机构采用空化射流技术可以大面积的清刷网衣,清刷效率和清洁度高。
附图说明
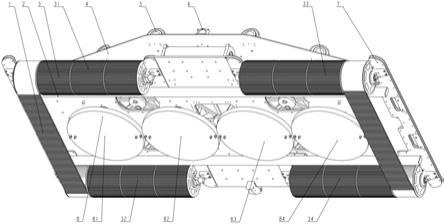
19.图1为本实用新型提供的一个实施例中海洋牧场网衣清刷机器人的结构示意图一。
20.图2为本实用新型提供的一个实施例中海洋牧场网衣清刷机器人的结构示意图二。
21.图3为本实用新型提供的一个实施例中海洋牧场网衣清刷机器人的结构示意图三。
22.图4为本实用新型提供的一个实施例中行走机构的结构示意图。
23.图5为本实用新型提供的一个实施例中旋转清刷机构的结构示意图。
24.图6为本实用新型提供的一个实施例中螺旋桨推力机构的结构示意图。
25.附图中:1、双面齿同步带;2、不锈钢方管;3、行走机构;4、机架上板;5、led灯;6、运动相机;7、不锈钢板i;8、旋转清刷机构;9、螺旋桨推力机构;10、控制模块;11、电机控制器;12、机架下板;13、开关电源;14、快速接头;15、电线;16、一进四出分流排;17、电线保护罩;18、吊环;19、不锈钢板ii;20、高压水管;21、吊环螺丝;22、把手;23、浮体i;24、同步带;25、螺旋桨保护罩;26、丝杆;27、轴承座;28、张紧轮;31、第一行走机构;32、第二行走机构;33、第三行走机构;34、第四行走机构;311、带轮;312、浮体ii;313、支撑带轮;314、传动带轮;315、电机轴承座;316、滚筒电机;317、上夹紧件;318、下夹紧件;319、骨架密封i;81、第一旋转清刷机构;82、第二旋转清刷机构;83、第三旋转清刷机构;84、第四旋转清刷机构;811、密
封夹紧件i;812、密封夹紧件ii;813、铝圆管;814、水枪电机;815、密封盖;816、法兰;817、水枪同步带;818、电机带轮;819、斜向喷嘴;8110、喷嘴;8111、清刷盘;8112、水枪带轮;8113、水枪外罩;8114、水枪接口;91、第一螺旋桨推力机构;92、第二螺旋桨推力机构;93、第三螺旋桨推力机构;94、第四螺旋桨推力机构;95、第五螺旋桨推力机构;911、螺旋桨电机;912、螺旋桨固定座;913、电机密封件;914、联轴器;915、螺母;916、销;917、骨架密封ii;918、螺旋桨桨叶;919、油封盖。
具体实施方式
26.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实施例公开的一些方面相一致的装置和方法的例子。
27.请参阅图1
‑
3,本实用新型提供的一个实施例中,一种海洋牧场网衣清刷机器人,包括机架、行走机构3、旋转清刷机构8、螺旋桨推力机构9和监控机构,所述行走机构3安装在所述机架的两侧端面,用于带动机架在待清刷面行走;至少一个所述旋转清刷机构和螺旋桨推力机构分别安装在所述机架朝向、背离所述待清刷面的一侧;所述旋转清刷机构用于清理机架行走通过的待清刷面,所述螺旋桨推力机构用于调节机架的位姿;所述监控机构用于监控行走机构的运动情况,并根据监控信息控制行走机构、旋转清刷机构、螺旋桨推力机构的工作。
28.具体的,所述机架包括支撑件、安装件,至少两个所述安装件通过所述支撑件相对设置。所述安装件包括机架上板5和机架下板12,所述支撑件采用不锈钢方管2,所述机架上板5和机架下板12通过不锈钢方管2相对设置,在所述不锈钢方管2的两端固定安装有不锈钢板i7,不锈钢板i7安装在机架下板12的边界处,上下包裹共12块,保证骨架强度。进一步的,不锈钢方管2共有两根,按照机架的长度方向放置,分别焊接在不锈钢板i7的下面,保证刚度,为轻量化设计,不锈钢方管两端焊接不锈钢板i7,增加机器人浮力,减少不必要的浮体,具有足够的刚度,能够有效避免机器人受撞击造成损伤。为了便于拿取机器人,在所述不锈钢板i7上设有把手22,方便拿取、搬运机器人。
29.如图1所示,所述行走机构有四个,分别为第一行走机构31、第二行走机构32、第三行走机构33、第四行走机构34,所述第一行走机构31、第二行走机构32同侧安装,第三行走机构33、第四行走机构34同侧安装;所述旋转清刷机构有四个,分别为线性排列在所述机架上的第一旋转清刷机构81、第二旋转清刷机构82、第三旋转清刷机构83、第四旋转清刷机构84;如图2所示,所述螺旋桨推力机构有五个,分别是第一螺旋桨推力机构91、第二螺旋桨推力机构92、第三螺旋桨推力机构93、第四螺旋桨推力机构94、第五螺旋桨推力机构95;将第一螺旋桨推力机构91、第二螺旋桨推力机构92、第三螺旋桨推力机构93、第五螺旋桨推力机构95呈矩形分布在四个点上,通过控制其正反转实现机器人翻转;第四螺旋桨推力机构94安装在矩形分布的四个点中间,可以通过更多的水流量,保证机器人稳定地吸附在网衣上。第一螺旋桨推力机构91、第二螺旋桨推力机构92、第三螺旋桨推力机构93、第四螺旋桨推力机构94和第五螺旋桨推力机构95对应设有螺旋桨保护罩25。
30.如图2、3所示,在本实施例中,所述安装件之间设有为机架提供浮力的浮体组;具
体的是由浮体i23拼接组成的浮体组,通过4个吊环螺丝21和16个丝杆26连接。
31.海洋牧场网衣清刷机器人的工作过程如下:
32.操作人员通过起吊搬运机械将海洋牧场清刷机器人放置在海洋牧场中,机器人与海平面成45
°
左右夹角,所述第一螺旋桨推力机构到第五螺旋桨推力机构同时按照一个方向旋转,将机器人吸附到网衣上,根据海水流动速度调节各螺旋桨推力机构的螺旋桨转速,进而调节吸附力大小。当机器人需要实现翻转运动时,第一螺旋桨推力机构和第二螺旋桨推力机构与第三螺旋桨推力机构和第五螺旋桨推力机构转向相反的时候,机器人可以左右翻转;第一螺旋桨推力机构和第五螺旋桨推力机构与第二螺旋桨推力机构和第三螺旋桨推力机构转向相反的时候,机器人可以前后翻转。机器人吸附到海洋牧场上后,第一行走机构到第四行走机构的转速相同,带动机器人在网衣上向前移动。当机器人需要转弯的时候,第一行走机构到第四行走机构进行差速运动,例如:第一行走机构与第二行走机构速度保持一致,第三行走机构与第四行走机构速度保持一致,当第一与第二行走机构速度快可实现左转弯,当第三行走机构与第四行走机构速度快的时候可实现右转弯。四个旋转清刷机构通过监控机构传递信号后同时进行旋转运动,高压水通过旋转清刷机构形成空化水射流将网衣上的海洋生物冲洗干净。通过监控机构实时传送回机器人的水下视频来反馈清刷效果,并及时调节机器人的姿态。
33.综上所述,所述海洋牧场网衣清刷机器人,设置的螺旋桨推力机构可以在较恶劣条件下保证机器人的运动稳定性,同时通过控制部分螺旋桨推力机构的正、反转调整机器人在水下的姿态;行走机构的行走方式顺应网衣,质地柔软,不会对网衣造成破坏;旋转清刷机构采用空化射流技术可以大面积的清刷网衣,清刷效率和清洁度高。
34.请参阅图4,本实用新型提供的另一个实施例中,所述行走机构包括行走驱动件和履带组,若干所述履带组两两相对安装在所述机架的两侧端面,同侧的履带组通过传动带连接,所述行走驱动件与所述履带组同轴心安装,所述行走驱动件带动履带组转动。
35.具体的,所述行走驱动件包括滚筒电机316、及间隔套在滚筒电机316上的带轮311和支撑带轮313;带轮间呈一定距离分布,内部空余部分填充满浮体ii312,带轮与浮体套在滚筒电机316上,外面再包裹一层同步带24组成一个履带模块。每个滚筒电机316上面设置三个所述履带模块组成一个履带组,履带组中履带模块间距离为零。本实施例中的履带组有四个,两两相对安装。滚筒电机316的端部设置一个传动带轮314,传动带轮314连接双面齿同步带1,双面齿同步带1作为传动带并与另一滚筒电机上的传动带轮连接,进行同速运动。滚筒电机与浮体312、带轮、同步带24紧密连接在一起;滚筒电机通电后,上述浮体312、带轮、同步带24一起旋转运动,形成了行走机构3。滚筒电机316尾端轴与深沟球轴承和轴承座315配合,轴承座315与机架下板12相连接,滚筒电机316出线端轴连接有上夹紧件317和下夹紧件318,上夹紧件317和下夹紧件318连接在机架下板12上,通过上夹紧件317和下夹紧件318夹紧出线端轴,进而实现滚筒电机的旋转运动;设有骨架密封i319对滚筒电机316出线端轴进行密封,保证滚筒电机的良好防水性。
36.进一步的,所述机架上安装有与所述传动带连接的调节件,通过所述调节件调节传动带的张紧力。所述调节件采用张紧轮28,所述张紧轮28通过轴承座27固定在机架下板12上,在双面齿同步带1下面设置张紧轮28进行张紧。所述的调节件,可以适应双面齿同步带1在一定范围内的松紧,进而保证机器人在行走过程中的良好吸附性和稳定性。
37.请参阅图5,本实用新型提供的另一个实施例中,所述旋转清刷机构包括清刷驱动件、与所述清刷驱动件传动连接的轴承安装在所述机架上的清刷盘816,所述清刷盘上安装有至少两组喷嘴组,所述喷嘴组通过连接管路连接有高压水供给端,所述清刷驱动件带动清刷盘转动以使所述喷嘴组产生空化射流。
38.具体的,所述清刷驱动件包括水枪电机814、安装在所述水枪电机814输出端的电机带轮818,所述水枪电机814设置在铝圆管813内,铝圆管813上有密封盖815,并内置起密封防水作用的o型圈,通过密封夹紧件i811和密封夹紧件ii812夹紧密封盖815。所述电机带轮818通过水枪同步带817连接水枪带轮8112,所述水枪带轮8112安装在水枪接口8114上,所述水枪接口8114通过水枪外罩8113安装在水枪电机814侧,水枪电机814和水枪外罩8113连接在法兰816上;且所述法兰816的高度可调。水枪接口与水枪外罩8113之间设有深沟球轴承,水枪外罩8113内有o型圈实现密封;所述水枪接口一端通过高压水管20接通一进四出分流排16,另一端接通安装在清刷盘上的喷嘴组,一进四出分流排16再接通高压水供给端,如图2所示。所述喷嘴组至少包括两个喷嘴8110,且两个所述喷嘴的喷水方向具有夹角,其中一个为斜向喷嘴819。高压水通过喷嘴形成空化水射流将网衣上的海洋生物冲洗干净,由于喷嘴是围绕清刷盘的中心线进行旋转运动并结合机器人前进,清刷的路线将是螺旋线,斜向喷嘴使得两个清刷机构的水射流有重合部分,清刷效果更好。
39.进一步的,每个水枪有4个喷嘴,清刷效果更好,操作员将通过监控机构实时传送回来的水下视频来反馈清刷效果,并及时调节机器人的姿态。
40.另外,所述一进四出分流排16通过不锈钢板ii19安装在机架上,监控机构的电气部件也通过不锈钢板ii19安装固定。
41.如图1、6所示,部分所述螺旋桨推力机构呈矩形或方形安装在所述行走机构中部的机架上,另一部分所述螺旋桨推力机构设置在所述的部分所述螺旋桨推力机构的几何中心。
42.具体是四个所述螺旋桨推力机构呈矩形或方形安装在所述行走机构中部的机架上,一个所述螺旋桨推力机构设置在所述的部分所述螺旋桨推力机构的几何中心;所述螺旋桨推力机构包括螺旋桨电机911,所述螺旋桨电机911通过旋桨固定座912固定在机架下板上,螺旋桨电机911输出轴与联轴器914连接,联轴器914通过销916与螺旋桨桨叶918连接进行传动,并设置螺母915拧紧。螺旋桨电机911上端由油封盖919和骨架密封ii917进行动密封,油封盖内注入油,起到润滑和防止海水进入作用,下端由电机密封件913进行油封。
43.在一个实施例中,如图1
‑
2所示,所述监控机构包括控制模块、与控制模块连接的摄像模块和供电模块,所述摄像模块用于监控行走机构的运动情况并传输给控制模块,所述控制模块根据摄像模块传输的监控信息控制行走机构、旋转清刷机构、螺旋桨推力机构的工作,所述供电模块提供电能。
44.所述控制模块10采用控制芯片,型号可选atmega128 ,控制芯片通过电机控制器11控制行走机构的滚筒电机;摄像模块采用运动相机6,并配有led灯5,led灯5提供照明;供电模块采用开关电源13,220v电缆供电到开关电源13,经开关电源后,电压降为24v,开关电源13为滚筒电机、螺旋桨电机、水枪电机、led灯、运动相机供电。所述开关电源的电线15及一进四出分流排16的快速接头14分别固定在不锈钢板ii19上,且所述不锈钢板ii19上设有吊环18,便于电气部件的快速拆卸。所述电线的接口处设有电线保护罩17,具有防水性。
45.进一步的,所述控制模块通讯连接有远程操作端,所述远程操作端通过控制模块遥控海洋牧场网衣清刷机器人的工作。
46.所述远程操作端采用遥控器,所述遥控器通讯连接控制芯片的通讯模块,实现数据的传输和交换。
47.本实用新型的工作原理:所述第一螺旋桨推力机构到第五螺旋桨推力机构同时按照一个方向旋转,将机器人吸附到网衣上,根据海水流动速度调节各螺旋桨推力机构的螺旋桨转速,进而调节吸附力大小。当机器人需要实现翻转运动时,第一螺旋桨推力机构和第二螺旋桨推力机构与第三螺旋桨推力机构和第五螺旋桨推力机构转向相反的时候,机器人可以左右翻转;第一螺旋桨推力机构和第五螺旋桨推力机构与第二螺旋桨推力机构和第三螺旋桨推力机构转向相反的时候,机器人可以前后翻转。机器人吸附到海洋牧场上后,第一行走机构到第四行走机构的转速相同,带动机器人在网衣上向前移动。当机器人需要转弯的时候,第一行走机构到第四行走机构进行差速运动,例如:第一行走机构与第二行走机构速度保持一致,第三行走机构与第四行走机构速度保持一致,当第一与第二行走机构速度快可实现左转弯,当第三行走机构与第四行走机构速度快的时候可实现右转弯。四个旋转清刷机构通过监控机构传递信号后同时进行旋转运动,高压水通过旋转清刷机构形成空化水射流将网衣上的海洋生物冲洗干净。通过监控机构实时传送回机器人的水下视频来反馈清刷效果,并及时调节机器人的姿态。
48.需要说明的是,本实用新型所采用的控制芯片( atmega128 )为现有技术的应用,本专业技术人员能够根据相关的描述实现所要达到的功能,或通过相似的技术实现所需完成的技术特性,在这里就不再详细描述。
49.本领域技术人员在考虑说明书及实施例处的公开后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
50.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1