一种自主搜救无人船的制作方法
1.本实用新型属于应急救援技术领域,尤其涉及一种自主搜救无人船。
背景技术:
2.目前溺水救援时,救生员的平均游泳速度较慢,一次任务至少花上半个小时,根本没时间搭救更多的落水者,另外巨浪激流等原因也是阻止救生员挽救落水者的因素之一,甚至有可能会对救援人员的人身安全造成威胁。虽然目前也有些救援船,但是也需要救生员驾驶救援船营救,救生员从准备至下水也要不少时间,而且救援船功能较为简单,一般都是将现有船只进行改装,更是无法在陆地行走,严重影响救援效率。
3.另外在其他应用场景下,例如在长江、湖泊等有通信阻断的环境下,通过现有救援船,救生员与外界无法通讯,无法及时回复当前救援环境和情况,也增加了救援危险性。
技术实现要素:
4.鉴于上述问题,本实用新型的目的在于提供一种自主搜救无人船,旨在解决现有救援船使用范围受限、影响救援效率的技术问题。
5.本实用新型采用如下技术方案:
6.所述自主搜救无人船,包括船体,所述船体外周安装有扶手,所述船体顶部有机舱体,所述自主搜救无人船还包括用于放置于所述机舱体内的无人机,所述船体后侧固定有载人浮漂,所述船体上设置有喊话模块、摄像模块和通讯模块,所述船体底部还安装有滚轮,所述船体后侧还有推进器。
7.进一步的,所述船体上还设有雷达惯性导航模块。
8.进一步的,所述船体包括中间台以及位于中间台两侧的浮筒,两个浮筒的顶面通过连接板形成为一体,所述机舱体位于连接板上,所述载人浮漂与所述中间台的后端形成一体,所述推进器有两个,分别对应位于两个浮筒后侧。
9.进一步的,所述扶手位于船体外周的左后右三侧。
10.进一步的,所述摄像模块包括立杆以及位于立杆顶部的全方位摄像机。
11.进一步的,所述通讯模块包括天线和数据网络模块。
12.进一步的,所述载人浮漂后端开口,中央形成下沉台。
13.进一步的,所述浮筒底部有转臂,所述滚轮安装在转臂末端。
14.进一步的,所述无人机内置有无线中继模块。
15.本实用新型的有益效果是:本自主搜救无人船可以在陆地上行驶,也可以在睡眠行驶,同时还搭载有无人机,通过操作在陆地寻找合适的下水,然后结合无人机可快速操作无人船达到落水者区域,能够实现快速部署,节省救援时间;落水者可以抓住船体三侧边的扶手,或是趴上载人浮漂等待救援;当落水者失去意识时,可作为临时载具由救援人员趴在载人浮漂上,由岸边人员操作快速送往落水者身旁,成为救援设备的新选择。本实用新型自主搜救无人船以最快捷的救援方式,更高的救援效率,搭救更多被困人员,提高了施救人员
的安全性。
附图说明
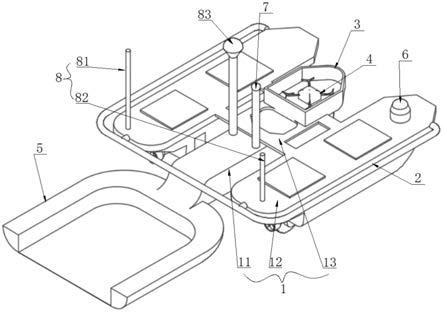
16.图1是本实用新型实施例提供的自主搜救无人船的一种角度立体图;
17.图2是本实用新型实施例提供的自主搜救无人船的另一角度立体图。
具体实施方式
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
19.为了说明本实用新型所述的技术方案,下面通过具体实施例来进行说明。
20.图1、2示出了本实用新型实施例提供的自主搜救无人船的结构,为了便于说明仅示出了与本实用新型实施例相关的部分。
21.如图1、2所示,所述自主搜救无人船,包括船体1,所述船体1外周安装有扶手2,所述船体1顶部有机舱体3,所述自主搜救无人船还包括用于放置于所述机舱体内的无人机4,所述船体1后侧固定有载人浮漂5,所述船体1上设置有喊话模块6、摄像模块7和通讯模块8,所述船体1底部还安装有滚轮9,所述船体1后侧还有推进器10。图示中,所述摄像模块7包括立杆以及位于立杆顶部的全方位摄像机,所述通讯模块8包括天线81和数据网络模块82。推进器有螺旋桨保护罩,使自主搜救无人船无惧水草等复杂水域,且可保护被困者受二次救援伤害,提高救援设备和救援人员的安全稳定性。单独设置的机舱体也可以避免水溅到无人机。
22.本实施例提供的无人船有着两栖特性,可以在陆地轻松行驶,也能在水面灵活的航行。无人船底部有滚轮,可以适应很多的复杂的地形,在其他救援设备无法通过的地方,无人船也能够轻松应对。同时,本无人船搭载长续航小型无人机作为搜救平台,可以对救援环境进行实时拍摄,传递信号,便于岸边操作员操作无人船。
23.具体在使用时,首先通过操作无人船在岸上精准行驶动作,并寻找合适下水的地方,下水之后在设定好的路线开起自动巡航和人工辅助操作,无人船上有摄像模块和通讯模块,可以将拍摄到的画面实时回传,可尽快将无人船行驶至溺水者附近水域。为了快速发现溺水者,另一操纵者可以通过控制台启动无人机起飞,由于无人机在空中视角更好,无人机也具有快速机动性能,因此无人机能快速发现溺水者,可辅助无人船更加精准的定位巡航。
24.本结构中,无人机在空能够观察现场实时情况,通过无人机操纵者能够锁定溺水者,然后将现场具体情况通过图像发射传送到岸边操作台,并将溺水者的具体位置发送到无人船,使无人船精准的航行到落水者位置。到达落水者周围后,并使用喊话模块安抚落水者,指导落水者以正确方式搭载无人船。最后实现将转移落水者至岸上。本无人船可同时救起3名以上的落水者,如果有多人落水,可立即进入下一批救援。整个过程十分便捷、快速、高效,能够明显提交救援效率,避免错过了救援时机。如果落水者失去意识,可作为临时载具由救援人员趴在载人浮漂上,由岸边人员操作快速送往落水者身旁,成为救援设备的新选择。
25.本实施例无人船的整体体型不易过大或者或小,体积过大携带操作不便,体积过小,一次救援人数有限,如果有多人落水时,可能会影响救援效率。船体设计是无人船的重点,必须提供足够的浮力以及便于搭载落水者。作为一种具体结构,所述船体1包括中间台11以及位于中间台11两侧的浮筒12,两个浮筒12的顶面通过连接板13形成为一体,所述机舱体3位于连接板13上,所述载人浮漂5与所述中间台11的后端形成一体,所述推进器10有两个,分别对应位于两个浮筒12后侧,所述扶手2位于船体1外周的左后右三侧。三侧扶手便于不同方向的落水者抓住,而且中间台和两个浮筒以及载人浮漂形成整体结构。载人浮漂独立于船体,可增加无人船整体面积,也便于落水者或者救援人员搭乘在载人浮漂上,使得能够更高效使用无人船。所述载人浮漂5后端开口,中央形成下沉台,这样能够降低载人浮漂的搭载位置,便于落水者搭上载人浮漂,而且下沉台周边也为空心结构,能够提高载人浮漂的载人浮力。
26.无人船在水面上行驶,为了降低滚轮9在水里面的阻力,图示中,所述浮筒12底部有转臂91,所述滚轮9安装在转臂9末端,在无人船入水后无人船操作者控制转动转臂即可收起滚轮。
27.无人船和操作台之间通过通讯模块联系,包括天线81和数据网络模块82,比如数据网络模块可以采用4g通讯模块,天线为915hz无线电天线系统,正常情况下使用4g通讯模块传递信号和数据,即使在没有4g信号的地方也能正常操控,通过915hz无线电也能和操作台联系。另外所述船体上还设有雷达惯性导航模块83,在卫星不好的地方使用雷达惯性导航模块83惯性导航。
28.本实施例中,所述无人机还内置有无线中继模块,充当临时转信台,从而使得极端环境下建立起无线通信的链路。
29.综上,通过本实用新型,救援时通过操作者将自主搜救无人船驾驶至落水者区域,通过搭载的无人机将真实情况通过无线4g通讯反馈至指挥室,以反馈的真实情况为依据作出最正确的救援方案。
30.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1