基于表面张力的仿生水黾机器人
1.本实用新型涉及仿生机器人领域,具体涉及基于表面张力的仿生水黾机器人。
背景技术:
2.传统水上机械主要运用浮力来使自身漂浮于水面,而对于小型水上机器人来说,只靠浮力来支撑自身是远远不够的。小型水上机器人体积较小,在水中的排水量有限,产生的浮力自然较小。而为了使得机器人有更高的性能,势必要搭载更多的功能模块和续航能源,其结构也会趋于紧凑,这会使机器人的平均密度大于水的密度。为了让机器人能漂浮与水面,最简单有效的方法是利用水的表面张力来提供支持力,弥补浮力的不足。自然界中也有许多利用表面张力来浮于水上的例子,如水黾、水蜘蛛等。其中水黾能适应于池塘、河流等较为平静的水面以及溪流等湍急的水面,并且有优异的水上运动能力。据研究显示,水黾在水面的移动速度能达到 1.5m/s,并且在水面上能跳跃 30cm 至 40cm的距离。因此研究水黾的水上漂浮机制对小型水上机器人的结构设计具有指导意义。
技术实现要素:
3.针对说明书中存在的问题,本实用新型提供了结构设计合理的基于表面张力的仿生水黾机器人。
4.本实用新型的技术方案如下:
5.基于表面张力的仿生水黾机器人,其特征在于,包括机体、设置在机体上的支撑腿及设置在机体上的驱动模块,所述支撑腿包括壳体、支撑腿垫、支撑腿连接轴、弹簧压帽、支撑腿连接滑块及弹簧,所述壳体固定设置在机体上,所述支撑腿连接滑块设置在壳体内,所述支撑腿连接轴一端与支撑腿连接滑块相连,另一端与支撑腿垫相连,所述弹簧压帽设在壳体顶部,所述弹簧设在壳体内且位于支撑腿连接滑块与弹簧压帽之间。
6.进一步的,所述支撑腿垫包括中心圆盘、圆环状薄板、薄板连接片及支撑腿连接轴安装柱;所述圆环状薄板设有若干个,且沿轴向依次倾斜设置在中心圆盘外围,且相邻所述圆环状薄板之间设有板间间隙,所述薄板连接片将中心圆盘与圆环状薄板以及圆环状薄板与圆环状薄板之间进行连接,从而形成一个整体,所述支撑腿连接轴安装柱设置在中心圆盘中心位置处,用于连接支撑腿连接轴。
7.进一步的,所述驱动模块分别设置在机体两侧位置处,驱动模块包括泵壳、波轮、开口卡圈、传动轴、驱动框架、o型密封圈、挡圈、联轴器、电机支架、减速电机及压盖;所述驱动框架下部固定设置泵壳,所述驱动框架上部固定设置压盖,所述压盖下部固定设置减速电机,所述减速电机外侧固定设置电机支架,所述减速电机的轴下部固定设置传动轴,并通过联轴器相连,所述传动轴底部活动连接设置波轮,所述传动轴与驱动框架上部接触处通过挡圈固定,并通过o型密封圈密封,所述传动轴与驱动框架下部接触处通过开口卡圈固定。
8.进一步的,所述机体内部为中空结构,其顶部设有机体盖,所述机体与机体盖连接
处设有密封圈。
9.进一步的,所述机体截面形状为正六边形,所述支撑腿设置在七个,其中六个均匀设置在机体的外侧面,一个设置在机体中心位置。
10.本实用新型的有益效果是:
11.1)通过在机体上设置弹簧压帽,在弹簧压帽下分别设置弹簧、支撑腿连接滑块、支撑腿连接轴、最优支撑腿垫,并通过上述各零部件之间的活动连接关系,使得各零件之间联动,从而实现在不同高度液面上稳定运行的功能。
12.2)采用多支撑腿排布以及特殊的脚垫结构,在脚垫喷涂超疏水涂层后,利用液体表面张力,每个脚垫可提供大概23克的支撑力。
13.3)采用了离心泵驱动方式,能减少水黾机器人的振动,避免被水草能杂物缠绕,又能提供足够的压力差通过反冲力来驱动水黾机器人。
14.4)仿生水黾机器人在遇到水波的颠簸时会产生惯性力,在脚垫与机体间增加弹簧,能尽量减小支撑腿的负担,增加脚垫的缓冲。
附图说明
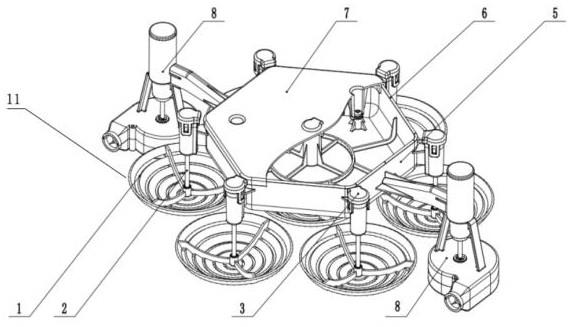
15.图1-为本实用新型的整体结构示意图;
16.图2为本实用新型的支撑腿结构示意图;
17.图3为本实用新型的驱动模块结构示意图;
18.图4为本实用新型的支撑腿垫结构示意图;
19.图中:1、支撑腿垫;101、中心圆盘;102、圆环状薄板;103、支撑腿连接轴安装柱;104、薄板连接片;2、连接支撑腿连接轴;3、弹簧压帽;4、壳体;5、机体;6、密封圈;7、机体盖;8、驱动模块;801、泵壳;802、波轮;803、开口卡圈;804、传动轴;805、驱动框架;806、o型密封圈;807、挡圈;808、联轴器;809、电机支架;810、减速电机;811、压盖;9、支撑腿连接滑块;10、弹簧;11、支撑腿。
具体实施方式
20.以下结合说明书附图,对本实用新型作进一步描述。
21.如图1-4所示,基于表面张力的仿生水黾机器人,包括支撑腿垫1、中心圆盘101、圆环状薄板102、支撑腿连接轴安装柱103、薄板连接片104、连接支撑腿连接轴2、弹簧压帽3、壳体4、机体5、密封圈6、机体盖7、驱动模块8、泵壳801、波轮802、开口卡圈803、传动轴804、驱动框架805、o型密封圈806、挡圈807、联轴器808、电机支架809、减速电机810、压盖811、支撑腿连接滑块9、弹簧10及支撑腿11。
22.支撑腿11在水的表面张力作用下能够为整个设备提供浮力;支撑腿11包括壳体4、支撑腿垫1、支撑腿连接轴2、弹簧压帽3、支撑腿连接滑块9及弹簧10,壳体4固定设置在机体5上,支撑腿连接滑块9设置在壳体4内,支撑腿连接轴2一端与支撑腿连接滑块9相连,另一端与支撑腿垫1相连,弹簧压帽3设在壳体4顶部,弹簧10设在壳体4内且位于支撑腿连接滑块9与弹簧压帽3之间。
23.支撑腿垫1包括一个中心圆盘101、五个圆环状薄板102、三个薄板连接片104及一个支撑腿连接轴安装柱103;五个圆环状薄板102且沿支撑腿垫1轴向依次倾斜设置在中心
圆盘101外围,且相邻所述圆环状薄板102之间设有板间间隙,薄板连接片104将中心圆盘101与圆环状薄板102以及圆环状薄板102与圆环状薄板102之间进行连接,从而形成一个整体,三个薄板连接片104均匀设在中心圆盘101、及圆环状薄板102圆周方向上,支撑腿连接轴安装柱103设置在中心圆盘101中心位置处,用于连接支撑腿连接轴2。
24.机体5内部为中空结构,其顶部设有机体盖7,机体5与机体盖7连接处设有密封圈6。本实施例中机体5截面形状为正六边形,所述支撑腿11设置在七个,其中六个均匀设置在正六边形的顶点位置处,一个设置在机体5中心位置。
25.机体5左右两侧固定设置驱动模块8;驱动模块左8包括泵壳左801、波轮802、开口卡圈803、传动轴804、驱动框架左805、o型密封圈806、挡圈807、联轴器808、电机支架809、减速电机810、压盖811,泵壳左801与驱动框架左805为驱动模块左8的外壳,压盖811下部固定设置减速电机810,减速电机810下部固定设置传动轴804,减速电机810与传动轴804通过联轴器808固定,减速电机810通过电机支架809与驱动框架左805固定,传动轴804下部活动连接设置波轮802,挡圈807用于传动轴804与驱动框架左805的固定,o型密封圈806用于传动轴804与驱动框架左805的密封,开口卡圈803用于传动轴804与驱动框架左805的固定。
26.工作过程:驱动模块8中的减速电机810转动,分别通过联轴器808带动传动轴804转动,进而分别带动波轮802转动,用于提供动力。可通过调整电机转速实现转向等操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1