一种智能潜水动力背包的制作方法
1.本实用新型涉及潜水背包技术领域,尤指一种智能潜水动力背包。
背景技术:
2.随着经济社会的发展和人们生活水平的不断提高,为了满足人们的不同需求,目前背包的样式也越来越多样化,但绝大多数背包均只具备传统的背戴功能,其功能和应用范围比较单一,并不能满足人们的需要。
3.通常背包都是用来装东西和物品,一般情况下是没有动力装置。在水上作业时,如水产养殖、水上休闲娱乐、水上救援等,迫切需要一种动力装置帮助人们工作,减轻人员的劳动强度。
技术实现要素:
4.为解决上述问题,本实用新型提供一种智能潜水动力背包,通过设置的推进器,可以使得用户在水中作业时,减轻其劳动强度,进而保证用户的安全,同时设置动力开关和惯性导航模块可以控制潜行的方向,智能化程度高,气瓶可以为用户提供充足的氧气,使得用户可以在水下进行长时间的作业。
5.为实现上述目的,本实用新型采用的技术方案是提供一种智能潜水动力背包,包括支撑架、安装于所述支撑架的支撑板、安装于所述支撑架两侧的安装套和推进器、安装于所述支撑架的气瓶、安装于所述支撑架的背板、及背带,所述背带一端安装于所述支撑架,所述背带的另一端安装于所述支撑板,所述推进器安装于所述安装套;所述背带内设置有电路板,所述背带还具有与所述电路板电连接的动力开关,所述电路板上设置有惯性导航模块,所述电路板与所述推进器电连接。
6.作为一种优选方案,所述支撑架设有卡槽,所述安装套设有与所述卡槽匹配的卡块,所述安装套通过所述卡块与所述卡槽的配合安装于所述支撑架。
7.作为一种优选方案,所述卡槽和所述卡块均呈t字型设置。
8.作为一种优选方案,还包括安装于所述支撑架的固定绑带和限位块,所述固定绑带套设于所述气瓶,所述限位块为两个且对称设置,所述限位块与所述气瓶抵接。
9.作为一种优选方案,所述支撑架设有主槽、及设置于主槽两侧的侧槽,所述气瓶和固定绑带均设置于所述主槽中,所述安装套安装于所述侧槽中。
10.作为一种优选方案,还包括安装于所述支撑架的防护垫,所述防护垫包括橡胶防护垫和布防护垫,所述橡胶防护垫和所述布防护垫均覆盖于所述气瓶,所述橡胶防护垫上设置有指示标识。
11.作为一种优选方案,所述背板上具有防滑板和软垫,所述软垫为多个且间隔设置。
12.作为一种优选方案,所述背带具有航行向右标识和航行向左标识,所述动力开关位于所述航行向右标识和航行向左标识之间,所述航行向右标识和航行向左标识均与所述电路板电连接。
13.作为一种优选方案,所述气瓶具有气压表和气瓶开关,所述气瓶开关位于所述气压表的一侧。
14.作为一种优选方案,还包括安装于所述支撑架的电池,所述电池位于所述支撑架的所述背板之间,所述电池分别与所述电路板和所述推进器电连接。
15.本实用新型的有益效果在于:通过设置的推进器,可以使得用户在水中作业时,减轻其劳动强度,进而保证用户的安全,同时设置的惯性导航模块可以控制潜行的方向,智能化程度高,气瓶可以为用户提供充足的氧气,使得用户可以在水下进行长时间的作业。
附图说明
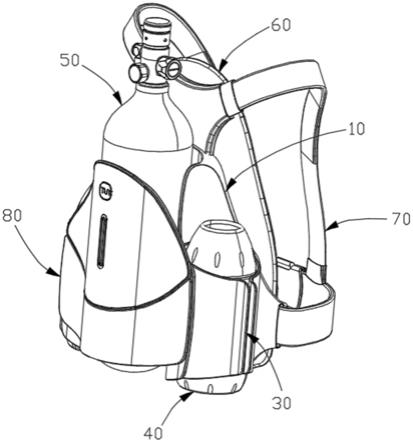
16.图1是本实用新型一种智能潜水动力背包的整体结构示意图。
17.图2为图1一种智能潜水动力背包的分解结构示意图。
18.图3为图1一种智能潜水动力背包中支撑架的结构示意图。
19.图4为图3一种智能潜水动力背包另一个角度的结构示意图。
20.图5为图1一种智能潜水动力背包中安装套的结构示意图。
21.图6为图1一种智能潜水动力背包中气瓶的结构示意图。
22.图7为图1一种智能潜水动力背包中背板的结构示意图。
23.图8为图1一种智能潜水动力背包中背带的结构示意图。
24.图9为图1一种智能潜水动力背包中防护垫的结构示意图。
25.附图标号说明:10-支撑架,11-卡槽,12-固定绑带,13-限位块,14-主槽,15-侧槽,16-背板安装槽,20-支撑板,30-安装套,31-卡块,40-推进器,50-气瓶,51-气压表,52-气瓶开关,60-背板,61-防滑板,62-软垫,70-背带,71-动力开关,72-航行向右标识,73-航行向左标识,80-防护垫,81-橡胶防护垫,82-布防护垫,83-指示标识,90-电池。
具体实施方式
26.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
28.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.如图1至图9所示,本实用新型关于一种智能潜水动力背包,包括支撑架10、安装于
所述支撑架10的支撑板20、安装于所述支撑架10两侧的安装套30和推进器40、安装于所述支撑架10的气瓶50、安装于所述支撑架10的背板60、及背带70,所述背带70一端安装于所述支撑架10,所述背带70的另一端安装于所述支撑板20,所述推进器40安装于所述安装套30;所述背带70内设置有电路板,所述背带70还具有与所述电路板电连接的动力开关71,所述电路板上设置有惯性导航模块,所述电路板与所述推进器40电连接;通过设置的推进器40,可以使得用户在水中作业时,减轻其劳动强度,进而保证用户的安全,同时设置的惯性导航模块可以控制潜行的方向,智能程度高,气瓶50可以为用户提供充足的氧气,使得用户可以在水下进行长时间的作业;本智能潜水动力包操作简单,可根据需要自由切换动力状态,可用与水下潜水、救援、水上游玩、游泳助力、游泳馆表演等水下作业。
30.在本实施例中,所述背带70还具有与所述电路板电连接的动力开关71,所述电路板上设置有惯性导航模块,所述电路板与所述推进器40电连接;动力开关71按第一下是打开推进器40,接着按第二下的第一个档位,再按第三下是第二个档位,按第四下是关闭推进器40,动力开关71和推进器40的配合可以实现推进器40的档位调速功能,其中第一挡续航为60分钟,第二档续航为30分钟;在航行时,由于两个推进器40安装在同一平面,且产生的推力平行于该平面,故仅能控制操作人员在推力平面上前进、后推及左右旋转,若要实现上浮、下潜功能需要潜水人员对潜水姿态进行调整并配合推进器40实现,航行时再配合电路板上设置的惯性导航模块可以更好的辅助进行航行,惯性导航模块可以辅助人体姿态控制潜水的方向,动力开关71的按压信息被电路板接收到,电路板再控制推进器40进行工作。
31.本技术的其中一个实施例中,所述支撑架10设有卡槽11,所述安装套30设有与所述卡槽11匹配的卡块31,所述安装套30通过所述卡块31与所述卡槽11的配合安装于所述支撑架10,卡块31与卡槽11的卡接式安装方式,便于拆装,方便后续的维修与更换;所述卡槽11和所述卡块31均呈t字型设置,t字型设置的卡槽11与卡块31不仅便于安装,同时安装也更稳固;还包括安装于所述支撑架10的固定绑带12和限位块13,所述固定绑带12套设于所述气瓶50,所述限位块13为两个且对称设置,所述限位块13与所述气瓶50抵接,本实施例中固定绑带12包括固定环、及安装于所述固定环的固定带,固定带为松紧带,且松紧带与固定环之间形成的固定槽的直径小于气瓶的直径,这样气瓶50在安装到固定槽中后,由于松紧带的收缩力,使得气瓶50被紧紧的绑住,而设置的限位块13可以进一步对气瓶50进行限位,防止气瓶50在使用过程中不会产生晃动;所述支撑架10设有主槽14、及设置于主槽14两侧的侧槽15,所述气瓶50和固定绑带12均设置于所述主槽14中,所述安装套30安装于所述侧槽15中,主槽14和侧槽15均是弧形槽,弧形槽便于安装槽30和气瓶50的安装,使得气瓶50和推进器40很好的贴合与支撑架10;支撑架10还设有背板安装槽16,背板60安装于背板安装槽16。
32.本技术的其中一个实施例中,安装套30由弹性材料加工制成,具有良好的形变效果,安装套设有放置槽,推进器40放置于所述放置槽中,安装套30的一端具有开口,开口的两端具有拨片,安装时将开口两端的拨片朝外拨,由于安装套30具有弹性,则放置槽变大,此时将推进器40放置于放置槽中,然后松开拨片,拨片回弹,安装套30恢复原状,放置槽恢复原状,使得推进器40被固定在放置槽中。
33.本技术的其中一个实施例中,推进器40采用的是自主研发的s56无轴推进器,其将传动的电机、驱动、轴系、螺旋桨集成一体,最高时速为1.2米每秒,最大的推力为100n,可潜
最大深度为30m,具有结构紧凑、可靠性好、推进效率高、工作噪音小等优点,本s56无轴推进器的驱动置于推进器内部,可整体浸没于水中,解决了传统推进器通讯线长、干扰大、一致性差、散热差等难题;高度集成式设计,减少了轴系传递带来的能量损耗;螺旋桨桨叶之间没有桨毂,推进效率优于常规螺旋桨;减少了震动噪音,实现航行器静默航行,可作为水面无人船、水下机器人、潜水助推器等产品的推进装置。
34.本技术的其中一个实施例中,所述支撑架10具有固定绑带12和限位块13,所述固定绑带12套设于所述气瓶50,所述限位块13为两个且对称设置,所述限位块13与所述气瓶50抵接,气瓶50通过固定绑带12和限位块13稳定的安装在支撑架10上,所述气瓶50具有气压表51和气瓶开关52,所述气瓶开关52位于所述气压表51的一侧;气压表51可以实时监测气瓶50的气压,以此来了解气瓶50内氧气的量,进而根据使用需求选择是否添加氧气,气瓶开关52用于打开气瓶50,使得气瓶50内的氧气送出供用户使用,本实施例中气瓶50的容量为2l可以有效保证用户的水下作业时长。
35.本技术的其中一个实施例中,支撑架10还设有背板安装槽16,背板60安装于背板安装槽16,所述背板60上具有防滑板61和软垫62,所述软垫62为多个且间隔设置,防滑板61上设置有多个间隔设置的防滑杠,多个防滑杠形成防滑区,防滑杠横向设置,根据实际需要本防滑杠还可以纵向设置,同时也可以一部分横向设置,一部分纵向设置;软垫62的设置可以提高用户的舒适感,而防滑板61的设置可以保证用户背背包时的稳定。
36.本技术的其中一个实施例中,所述背带70内设置有电路板,所述背带70还具有与所述电路板电连接的动力开关71,所述电路板上设置有惯性导航模块,所述电路板与所述推进器40电连接,所述背带70具有航行向右标识72和航行向左标识73,所述动力开关71位于所述航行向右标识72和航行向左标识73之间,所述航行向右标识72和航行向左标识73均与所述电路板电连接,当用户向右航行时,电路板控制航行向右标识72亮起,而当用户向左航行时,电路板控制航向向左标识73亮起,在本实施例中,背带70采用的是弹性材料制成,提高用户的穿戴舒适度。
37.本技术的其中一个实施例中,背带70包括肩带部分和腰带部分,肩带部分与腰带部分固定连接,所述动力开关71、所述航行向右标识72和航行向左标识73均安装于腰带部分,肩带部分安装于支撑板20,支撑板20的两侧具有肩带连接部,肩带部分一端安装于肩带肩带连接部,肩带部分的另一端安装于腰带部分,支撑架10的两侧具有腰带连接部,腰带部分的两端分别安装于支撑架10两侧的腰带连接部,腰带部包括第一腰带部和第二腰带部,第一腰带部与第二腰带部卡接,可以根据需求进行拆开或卡合。
38.本技术的其中一个实施例中,还包括安装于所述支撑架10的防护垫80,所述防护垫80包括橡胶防护垫81和布防护垫82,所述橡胶防护垫81和所述布防护垫82均覆盖于所述气瓶50,所述橡胶防护垫81上设置有指示标识83;防护垫80的设置用户进一步的稳固气瓶50,提高气瓶的安装稳定性,在本实施例中,橡胶防护垫81是由橡胶材料注塑而成,布防护垫82是由布料编织而成,并且采用是耐腐蚀的橡胶材料和布料,指示标识83采用的是黄色材料制成,在水下能有醒目的指示作用。
39.本技术的其中一个实施例中,还包括安装于所述支撑架10的电池90,所述电池90位于所述支撑架10的所述背板60之间,所述电池90分别与所述电路板和所述推进器40电连接;电池90用于给电路板、推进器40、动力开关71、航行向右标识72和航行向左标识提供电
力支持,而在本实施例中,电池采用的是磷酸铁锂电池,具有安全性能好的特点。
40.以上实施方式仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通工程技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1