一种智能无人搜救船
1.本发明涉及搜救领域,具体涉及一种智能无人搜救船。
背景技术:
2.目前对于落水人员的救助主要工具有:救生圈、救生绳、救生衣、救援杆、吊状设备和各种抛投浮具等。这些救援设备确实可以对落水清醒的人员实现有效救治,但是对于意识已经模糊和没有行动能力的落水人员,救援效率大打折扣。同时现阶段的无人救助船在就救援失去行动能力的人时效果也比较低,因此如何对无行动能力的人进行有效救助是目前亟需解决的问题。
3.公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种智能无人搜救船,以达到实现对无行动能力的人的有效救助和提高救助效率的目的。
5.为达到上述目的,本发明的技术方案如下:
6.一种智能无人搜救船,包含有船体、设置在所述船体上用于对受困人员的施救组件、设置在所述船体上实现船体移动的驱动组件和设置在所述船体上监控组件;
7.所述船体包含有呈“h”形的架体,所述架体的头端设有救援槽、对救援槽进行遮蔽的前盖和驱动前盖进行翻转的第一液压缸,所述前盖的尾端铰接在所述架体上,且所述前盖在所述第一液压缸的作用下覆盖在所述救援槽;
8.所述施救组件包含有铰接在所述救援槽上的救援铲板和安装在所述架体上用于驱动所述救援铲板进行活动的第二液压缸;所述救援铲板设置在前盖下方,所述救援铲板的尾端铰接在所述架体上,所述第二液压缸设置在所述救援铲板的边缘中部,所述第二液压缸驱动所述救援铲板绕其端部翻转;
9.所述监控组件包含有设置在架体内侧的第一红外摄像机和设置在所述架体外侧的第二红外摄像机;
10.本发明通过监控组件进行监控为船体的救援提供路线和侦测,通过由救援铲板和第二液压缸组成的施救组件对人员进行有效救助,达到实现对无行动能力的人的有效救助和提高救助效率的目的。
11.作为优选的,所述驱动组件包含有设置在所述船体上的一对风机,所述风机能够实现360
°
旋转。通过一对可360
°
旋转的风机实现对船体的驱动,方便船体的灵活移动。
12.作为优选的,所述船体还包含有设置在架体两侧的浮体和设置在浮体上的拱形桥,且两个浮体的中部设置于所述拱形桥的端部;所述风机也安装在所述拱形桥上。通过拱形桥和设置在拱形桥端部的浮体形成双浮体结构,提升了船体的整体稳定性。
13.作为优选的,所述监控组件还包含有设置在所述浮体端部的摄像头和设置在所述
浮体前端的雷达。通过雷达和摄像头进一步保证了船体行走的安全性。
14.作为优选的,所述架体的后端安装有甲板和设置在架体上对甲板进行遮蔽的后盖,后盖的端部铰接在架体上,所述架体上设有驱动后盖翻转的液压缸。通过甲板、后盖和液压缸方便无人机的安放,进一步提升救援效率和救援质量。
15.作为优选的,所述救援铲板上分布有数个孔洞,且所述救援铲板的头端向上翘起形成安全挡板。通过在救援铲板上设置数个孔洞便于在人员获救后将水过滤掉,通过安全挡板进一步保证了待获救人员的安全。
16.公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
17.本发明具有如下优点:
18.1.本发明通过监控组件进行监控为船体的救援提供路线和侦测,通过由救援铲板和第二液压缸组成的施救组件对人员进行有效救助,达到实现对无行动能力的人的有效救助和提高救助效率的目的。
19.2.本发明通过一对可360
°
旋转的风机实现对船体的驱动,方便船体的灵活移动。
20.3.本发明通过拱形桥和设置在拱形桥端部的浮体形成双浮体结构,提升了船体的整体稳定性。
21.4.本发明通过雷达和摄像头进一步保证了船体行走的安全性。
22.5.本发明通过甲板、后盖和液压缸方便无人机的安放,进一步提升救援效率和救援质量。
23.6.本发明通过在救援铲板上设置数个孔洞便于在人员获救后将水过滤掉,通过安全挡板进一步保证了待获救人员的安全。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
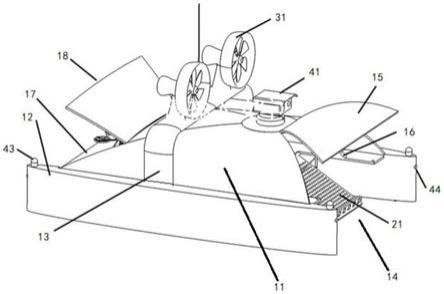
25.图1为本发明实施例公开的一种智能无人搜救船的结构示意图;
26.图2为本发明实施例公开的一种智能无人搜救船的主视示意图;
27.图中数字和字母所表示的相应部件名称:
28.11.架体 12.浮体 13.拱形桥 14.救援槽 15.前盖 16.第一液压缸 17.甲板 18.后盖 21.救援铲板 22.第二液压缸 23.孔洞 24.安全挡板 31.风机 41.第一红外摄像机 42.第二红外摄像机 43.摄像头 44.雷达 45.控制台。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
30.本发明提供了一种智能无人搜救船,其工作原理是通过监控组件进行监控为船体的救援提供路线和侦测,通过由救援铲板和第二液压缸组成的施救组件对人员进行有效救助,达到实现对无行动能力的人的有效救助和提高救助效率的目的。
31.下面结合实施例和具体实施方式对本发明作进一步详细的说明。
32.如图1和图2所示,一种智能无人搜救船,包含有船体、设置在所述船体上用于对受困人员的施救组件、设置在所述船体上实现船体移动的驱动组件和设置在所述船体上监控组件。
33.所述船体包含有呈“h”形的架体11、设置在架体两侧的浮体12和设置在浮体上的拱形桥13,且两个浮体的中部设置于所述拱形桥的端部;所述架体的头端设有救援槽14、对救援槽进行遮蔽的前盖15和驱动前盖进行翻转的第一液压缸16,所述前盖的尾端铰接在所述架体上,且所述前盖在所述第一液压缸的作用下覆盖在所述救援槽;所述架体的后端安装有甲板17和设置在架体上对甲板进行遮蔽的后盖18,后盖的端部铰接在架体上,所述架体上设有驱动后盖翻转的液压缸(未画出)。
34.所述施救组件包含有铰接在所述救援槽上的救援铲板21和安装在所述架体上用于驱动所述救援铲板进行活动的第二液压缸22;所述救援铲板设置在前盖下方,所述救援铲板的尾端铰接在所述架体上,所述第二液压缸设置在所述救援铲板的边缘中部,所述第二液压缸驱动所述救援铲板绕其端部翻转;所述救援铲板上分布有数个孔洞23,且所述救援铲板的头端向上翘起形成安全挡板24。
35.所述监控组件包含有设置在架体内侧的第一红外摄像机41、设置在所述架体外侧的第二红外摄像机42、设置在所述浮体端部的摄像头43和设置在所述浮体前端的雷达44。
36.所述驱动组件包含有设置在所述船体上的一对风机31,所述风机能够实现360
°
旋转;所述风机也安装在所述拱形桥上。
37.本发明的具体使用步骤如下:再如图1和图2所示,在智能无人搜救船行驶的过程中,雷达44可以时刻监测智能无人搜救船行驶线路上是否存在障碍,在雷达44发现存在障碍后,便可及时调整智能无人搜救船的行驶路线,从而避免智能无人搜救船的行驶受到阻碍,也为智能无人搜救船的安全行驶提供了保障,并且当实施救援时雷达也能对落水人员具体位置起到精准定位作用。
38.根据第一红外摄像机41第二红外摄像机42、雷达3等信息确定了落水人员位置,在第一液压机构16和第二液压机构22的带动下,前盖15和救援铲板21打开,驱动机构31工作船体缓慢移动,保证救援铲板21位于落水人员的正下方,根据控制机构45(控制机构设置在架体内用于观察救援铲板的状况,并接受各个摄像机、雷达、摄像头和红外线装置接受到的信号,并通过天线发送给控制室便于救援人员知晓)对第二红外摄像机42图像、设置在架体上的红外线装置的感应信息以及无人机图像信息的处理,第二液压机构驱动救援铲板21开始进行上抬闭合,完成救援,同时水流会从孔洞中流程,而安全挡板也进一步保证了人员的安全。
39.在实际操作过程中,可以在架体上gps定位和天线,进一步提升了救援信号的准确性。
40.由于本发明包括监测机构和无人机能够判断所处的环境信息,能够根据环境信息,控制所述救援铲板的翻离或翻向所述船体,所以智能无人搜救船可以对无意识落水人员实施准确高效救援。其次由于本发明包括驱动机构,带有双风机动力系统,能够快速到达指令目的地。再次由于本发明包括船体,所述前盖、后盖、船体可以形成具有流线型的封闭体,智能无人搜救船快速运动时或工作时,能够减少阻力和减少风浪对其的影响,从而切实解决了现有无人搜救船无法在恶劣环境工作的问题。
41.通过以上的方式,本发明所提供的一种智能无人搜救船,通过监控组件进行监控为船体的救援提供路线和侦测,通过由救援铲板和第二液压缸组成的施救组件对人员进行有效救助,达到实现对无行动能力的人的有效救助和提高救助效率的目的。
42.以上所述的仅是本发明所公开的一种智能无人搜救船的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1