一种带整流罩的水下机器人
1.本发明属于水下机器人技术领域,具体涉及一种带整流罩的水下机器人。
背景技术:
2.随着科技水平的逐渐发展,人类的活动领域渐渐的向大海移动。近些年,关于海洋的技术在飞速的发展,水下机器人就是其中之一。水下机器人的问世,大大降低了人力成本,规避了危险环境下可能产生的人员伤亡,广泛地应用在水文探索、资源勘探、水下考古、海洋牧场等领域。关于浅水区域的低成本、小体积、多功能的水下机器人的研究对科技进步、经济发展均有着重要意义。
3.现有的小型水下机器人由于其体积小、动力不足,易受浪流的影响。当遭遇海流、启动或停止时容易发生纵倾和横摇,严重影响了水下机器人的操纵性和稳定性,对操作员带来不便。
4.因此,如何减少水下机器人阻力,减少浪流对水下机器人操作性和稳定性的影响,提高水下机器人灵活性是本领域技术问题亟待解决的技术问题。
技术实现要素:
5.本发明的目的在于克服水下流场对机器人产生阻力影响操纵性和稳定性的问题,提供了一种带整流罩的水下机器人,可以有效减少水下阻力。
6.一种带整流罩的水下机器人,包括外壳、推进器、整流罩;所述外壳上部为水平放置的圆柱形,前后部分均为弧面;所述整流罩为扁平状,设置于外壳的两侧;当有对向来流时,外壳两侧的整流罩能有效的减少来流对水下机器人产生的扰动,提高水下机器人的稳定性,当水下机器人行进时也能减少由于水下机器人运动而产生的兴波阻力,使水下机器人运行的更加平稳,同时扁平状的整流罩亦起到了水翼的作用,为水下机器人提供了向上的升力,减少了推进器的负载,提高了水下机器人的机动性。
7.进一步地,所述推进器包括垂直螺旋桨推进器和水平螺旋桨推进器;所述整流罩上开设有推进器安装通孔;所述垂直螺旋桨推进器安装于外壳两侧整流罩的推进器安装通孔中;所述外壳后部两侧布置有涵道;所述水平螺旋桨推进器设置于外壳两侧的涵道内,涵道用于减少叶尖的诱导阻力,提升水平螺旋桨推进器的推力,同时由于涵道的环括作用,具有更好的安全性。
8.进一步地,还包括电子舱;所述电子舱设置于外壳的底部,电子舱内部搭载水下机器人的控制系统,置于外壳底部的电子舱将水下机器人的重心降低,使重心在浮心之下,当水下机器人产生横摇和纵倾时产生恢复力矩,使水下机器人快速恢复到稳定状态,配合带整流罩的外壳设计,进一步地增强了水下机器人的稳定性。
9.进一步地,还包括观测舱;所述观测舱整体为半球形舱,布置于外壳上部前端,在观测舱内设有摄像头,用于采集环境景象。
10.本发明的有益效果在于:
11.本发明采用螺旋桨推进器作为动力来源,利用垂直螺旋桨推进器控制升沉,利用水平螺旋桨推进器控制进退和转弯,同时水平螺旋桨推进器设置于尾部涵道,能减少叶尖的诱导阻力,进而提升水平推进器的推力,同时由于涵道的环括作用,具有更好的安全性。本发明通过水下机器人自身两侧的整流罩有效的减少来流阻力和行进停止时产生的兴波阻力,与普通不带整流罩的水下机器人相比,具有更好的稳定性和操作性,同时两侧伸长的整流罩也能起到水翼作用,为水下机器人提供升力,减少了垂直螺旋桨推进器的负载,提高了水下机器人的机动性能。
附图说明
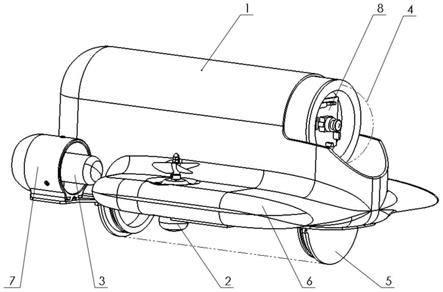
12.图1为本发明中一种带整流罩的水下机器人的总体结构示意图。
13.图2为本发明中一种带整流罩的水下机器人的主视图。
14.图3为本发明中一种带整流罩的水下机器人的俯视图。
15.图4为本发明中一种带整流罩的水下机器人的左视图。
具体实施方式
16.下面结合附图对本发明做进一步描述。
17.本发明的目的在于克服水下流场对机器人产生阻力影响操纵性和稳定性的问题,提供了一种带整流罩的水下机器人,可以有效减少水下阻力。
18.一种带整流罩的水下机器人,包括外壳1、垂直螺旋桨推进器2、水平螺旋桨推进器3、观测舱4、电子舱5、整流罩6、涵道7;所述整流罩6为扁平状,设置于外壳1的两侧,在整流罩6上开设有推进器安装通孔;当有对向来流时,外壳1两侧的整流罩6能有效的减少来流对水下机器人产生的扰动,提高水下机器人的稳定性,当水下机器人行进时也能减少由于水下机器人运动而产生的兴波阻力,使水下机器人运行的更加平稳,同时扁平状的整流罩6亦起到了水翼的作用,为水下机器人提供了向上的升力,减少了垂直螺旋桨推进器2的负载,提高了水下机器人的机动性;所述垂直螺旋桨推进器2安装于外壳1两侧整流罩6的推进器安装通孔中;所述涵道7设置于外壳1后部两侧;所述水平螺旋桨推进器3设置于外壳1两侧的涵道7内,涵道7用于减少叶尖的诱导阻力,提升水平螺旋桨推进器3的推力,同时由于涵道7的环括作用,具有更好的安全性;所述外壳1上部为水平放置的圆柱形,前后部分均为弧面;所述观测舱4整体为半球形舱,布置于外壳1上部前端,在观测舱4内设有摄像头8,用于采集环境景象;所述电子舱5设置于外壳1的底部,电子舱5内部搭载水下机器人的控制系统,置于外壳1底部的电子舱5将水下机器人的重心降低,使重心在浮心之下,当水下机器人产生横摇和纵倾时产生恢复力矩,使水下机器人快速恢复到稳定状态,配合带整流罩6的外壳1设计,进一步地增强了水下机器人的稳定性。
19.实施例1:
20.本实施例提供的一种带整流罩的水下机器人,包括外壳1、垂直螺旋桨推进器2,水平螺旋桨推进器3、观测舱4和电子舱5。
21.外壳1两侧为整流罩6,分别设置于外壳1的两侧,当有对向来流时,能有效的减少来流对水下机器人产生的扰动,提高机器人的稳定性;当水下机器人行进时,也能减少由于水下机器人运动而产生的兴波阻力,使水下机器人运行的更加平稳。同时扁平状的整流罩6
亦起到了水翼的作用,为水下机器人提供了向上的升力,减少了垂直螺旋桨推进器2的负载,缓解了垂直螺旋桨推进器2的压力,提高了水下机器人的机动性。
22.垂直螺旋桨推进器2设置于总体的中间位置,在本实施例中,垂直螺旋桨推进器2的数量为两个,但也可为多个,只要能保证水下机器人平稳布置即可。水平螺旋桨推进器3设置于外壳的后部,设置于涵道7内,涵道7的优点在于能减少叶尖的诱导阻力,进而提升效率,在相同的功率消耗下,涵道能提升推进器的推力。同时由于涵道的环括作用,具有更好的安全性。设置两个水平螺旋桨推进器3,既能保证水下机器人的平稳,也能保证水下机器人的机动需求。
23.两个水平螺旋桨推进器3用于控制水下机器人的前进后退和转弯,当左右两个螺旋桨以相同转速转动时,机器人可沿着直线前进后退;当左右两个螺旋桨以不同转速转动时,可实现旋转。
24.所述整流罩6上设有通孔,垂直螺旋桨推进器2与通孔相通。外壳上部为水平放置的圆柱形,前后部分为弧面。观测舱4位于水下机器人外壳上部圆柱体处,观测舱4包括半球形舱4和设置于舱内的摄像头8,用于采集环境景象,为操纵员或自主控制系统提供信息。摄像头8可根据需求的不同更换,当水下环境较暗,且在潜水时,可使用带红外补光的摄像头。外壳1上部圆柱体加圆角的设计,提高了观测舱4的相对高度,在不增加过多阻力的条件下提供了更好的视野,使水下机器人有更广的视野。
25.电子舱5设置于外壳1的底部,电子舱为两端设有端盖的透明筒,内部可以根据需求放置控制板、电机驱动等部件,重量较重。电子舱5设置于底部能有效的将水下机器人的重心降低,使水下机器人的重心在浮心之下,当机器人产生横摇和纵倾时产生恢复力矩,使水下机器人快速恢复到稳定状态,配合带整流罩的外壳1设计,进一步地增强了水下机器人的稳定性。
26.进一步地,垂直螺旋桨推进器2和水平螺旋桨推进器3通过支撑板安装在外壳1上。外壳内部有加强的框架和浮力材料,支撑板上装有定位螺栓方便安装。本发明根据功能分舱,便于水下机器人的安装维护以及后续其他功能的拓展
27.本发明采用螺旋桨推进器作为动力来源,利用垂直螺旋桨推进器控制升沉,利用水平螺旋桨推进器控制进退和转弯,同时水平螺旋桨推进器设置于尾部涵道,能减少叶尖的诱导阻力,进而提升水平推进器的推力,同时由于涵道的环括作用,具有更好的安全性。本发明通过水下机器人自身两侧的整流罩有效的减少来流阻力和行进停止时产生的兴波阻力,与普通不带整流罩的水下机器人相比,具有更好的稳定性和操作性,同时两侧伸长的整流罩也能起到水翼作用,为水下机器人提供升力,减少了垂直螺旋桨推进器的负载,提高了水下机器人的机动性能。
28.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1