AUV用360度回转合成推进机构
auv用360度回转合成推进机构
技术领域
1.本发明涉及水下机器人领域,具体地说是一种auv用360度回转合成推进机构。
背景技术:
2.在建设海洋强国的战略背景下,自主水下机器人(auv)在大洋科考、深海资源勘查等领域已经起到了不可替代的作用。传统auv的运动控制采用横剖面和纵剖面两个操纵面内的独立操控控制,auv三维空间中的运动实际为两个操控平面内运动的矢量和,但这种方式运动分解存在近似误差,矢量合成过程中存在数值误差,整个操控过程响应速度低,并且控制系统较为复杂。
技术实现要素:
3.本发明的目的在于提供一种auv用360度回转合成推进机构,可以通过空间运动直驱的方式对auv进行运动控制,整个操控过程响应速度高,控制系统模型较为精简。
4.本发明的目的是通过以下技术方案来实现的:
5.一种auv用360度回转合成推进机构,包括艏部回转段和艉部回转段,其中艏部回转段包括艏部安装筒、艏部浮力段和艏部推进器,艏部安装筒设于auv舱段前端且内部设有回转驱动组件,艏部浮力段与艏部安装筒前端转动连接并通过所述回转驱动组件驱动转动,艏部浮力段内部两侧均设有艏部推进器,且两侧艏部推进器轴向相同并垂直于auv轴向,艉部回转段包括艉部安装筒、艉部浮力段和艉部推进器,艉部安装筒设于auv舱段后端且内部设有艉部回转电机,艉部浮力段与艉部安装筒后端转动连接并通过所述艉部回转电机驱动转动,艉部浮力段两侧均设有艉部推进器,且所述艉部推进器轴向与auv轴向呈夹角α设置。
6.所述回转驱动组件包括齿轮环、驱动齿轮和艏部回转电机,其中艏部回转电机固设于艏部安装筒内,驱动齿轮安装于艏部回转电机输出端,齿轮环转动设于艏部安装筒中并与所述艏部浮力段固连,并且所述驱动齿轮与所述齿轮环内侧齿形啮合。
7.所述艏部安装筒内设有齿轮限位架,且所述驱动齿轮前侧和后侧分别与对应侧的齿轮限位架相抵;所述艏部安装筒前端设有卡紧环,所述齿轮环外壁设有卡槽,且所述卡紧环卡装于所述卡槽中。
8.所述齿轮限位架包括连接架体和限位环部,其中所述连接架体固设于所述艏部安装筒中,所述限位环部设于连接架体上端并与所述驱动齿轮对应侧壁相抵。
9.所述卡紧环与所述卡槽的槽底之间设有防磨损环。
10.所述艏部浮力段包括艏部浮力材和设于艏部浮力材之间的艏部推进器固定筒,并且所述艏部推进器固定筒轴向垂直于auv轴向,两个艏部推进器分设于所述艏部推进器固定筒内部两端。
11.所述艉部回转段的艉部浮力段包括回转支撑筒、安装支板、艉部浮力材和稳定翼,其中回转支撑筒与艉部安装筒转动连接,且所述回转支撑筒中部设有安装支板,艉部回转
电机固设于所述艉部安装筒中,且所述艉部回转电机输出端与所述安装支板前端固连,所述艉部浮力材、稳定翼和艉部推进器均固装于所述安装支板上。
12.所述艉部安装筒后端设有连接端板,且所述连接端板外壁与所述回转支撑筒的侧筒壁之间设有卡紧箍,所述回转支撑筒上设有呈z型的卡紧箍入口,所述连接端板外壁和回转支撑筒的侧筒壁内侧之间形成截面为z型的空隙,且卡紧箍由所述卡紧箍入口进入所述z型空隙中。
13.所述艉部安装筒内设有电机固定板,所述艉部回转电机固装于所述电机固定板中部,所述回转支撑筒一侧设有支板固定板,所述安装支板前端设有固定部,且所述固定部固设于所述支板固定板中部。
14.所述安装支板上下两侧均垂直设有稳定翼,并且两个稳定翼处于同一平面上,所述安装支板左右两侧均设有推进器连接架,且所述艉部推进器设于对应侧的推进器连接架上,所述艉部浮力段包括多块沿着圆周方向均布的艉部浮力材,且相邻艉部浮力材之间均形成安装间隙,所述安装支板、稳定翼和推进器连接架分别设于对应的安装间隙中,所述艉部推进器设于艉部浮力材外侧。
15.本发明的优点与积极效果为:
16.1、本发明可以通过空间运动直驱的方式对auv进行运动控制,无需再借助两个操作面内的运动分解和空间矢量合成实现auv空间运动控制,避免了运动分解存在的近似误差和矢量合成中的数值误差,整个操控过程响应速度高,控制系统模型较为精简。
17.2、本发明的艏部回转段通过驱动齿轮和齿轮环的配合实现360
°
回转,易于控制回转角度,保证回转精确,并且驱动齿轮通过两侧的齿轮限位架实现轴向限位,齿轮环通过卡紧环实现轴向限位,整体结构更为紧凑,不会占用过多的安装空间。
18.3、本发明的艉部回转段中,艉部安装筒与回转支撑筒之间通过z型的卡紧箍楔入锁紧实现转动连接,简化了两者之间的连接结构,另外回转支撑筒中部设置安装支板,艉部浮力材、稳定翼、艉部推进器等部件均设于所述安装支板上,结构简化同时安装也更加简单方便。
19.4、本发明通过对称安装的推进器消除推进器对auv的翻转力矩,可实现自平衡稳定操控,艉部推进器轴线与auv轴线夹角为22.5度,为auv巡航模式下的高效布置角度。
附图说明
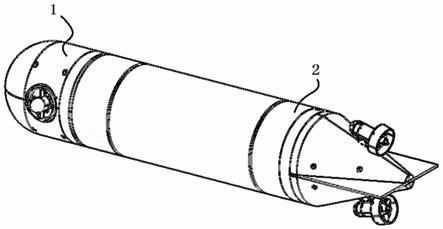
20.图1为本发明在auv上的结构示意图,
21.图2为图1中的auv剖视图,
22.图3为图1中的艏部回转段结构示意图,
23.图4为图3中的艏部回转段剖视图,
24.图5为图3中的艏部回转段去掉浮力材后的结构示意图,
25.图6为图5中去掉浮力材后的艏部回转段剖视图,
26.图7为图1中的艉部回转段结构示意图,
27.图8为图7中的艉部回转段去掉浮力材后的结构示意图,
28.图9为图8中的回转支撑筒和艉部安装筒连接示意图,
29.图10为图8中去掉浮力材后的艉部回转段剖视图,
30.图11为图10中的a处放大图,
31.图12为图8中去掉浮力材后的艉部回转段另一角度剖视图。
32.其中,1为艏部回转段,101为艏部安装筒,1011为限位板,102为齿轮环,103为艏部推进器,104为艏部浮力材,105为艏部推进器固定筒,1051为抱箍,106为驱动齿轮,107为齿轮限位架,1071为连接架体,1072为限位环部,108为艏部回转电机,109为卡紧环,1091为防磨损环,2为艉部回转段,201为艉部回转电机,202为艉部安装筒,2021为电机固定板,2022为连接端板,203为艉部推进器,204为艉部浮力材,205为安装支板,2051为固定部,206为回转支撑筒,2061为支板固定板,2062为卡紧箍入口,2063为侧筒壁,207为稳定翼,208为推进器连接架,209为卡紧箍。
具体实施方式
33.下面结合附图对本发明作进一步详述。
34.如图1~12所示,本发明包括艏部回转段1和艉部回转段2,如图2~6所示,所述艏部回转段1包括艏部安装筒101、艏部浮力段和艏部推进器103,其中艏部安装筒101设于auv舱段前端,且所述艏部安装筒101内部设有回转驱动组件,艏部浮力段与所述艏部安装筒101前端转动连接,且所述艏部浮力段通过所述回转驱动组件驱动转动,所述艏部浮力段内部两侧均设有艏部推进器103,且两侧艏部推进器103轴向相同并垂直于auv轴向,如图2和图7~12所示,所述艉部回转段2包括艉部安装筒202、艉部浮力段和艉部推进器203,其中艉部安装筒202设于auv舱段后端,且所述艉部安装筒202内设有艉部回转电机201,艉部浮力段与所述艉部安装筒202后端转动连接,且所述艉部浮力段通过所述艉部回转电机201驱动转动,如图2所示,所述艉部浮力段两侧均设有艉部推进器203,且所述艉部推进器203轴向与auv轴向呈夹角α设置。本实施例中,所述α角为22.5度。
35.如图2~6所示,所述回转驱动组件包括齿轮环102、驱动齿轮106和艏部回转电机108,其中艏部回转电机108固设于艏部安装筒101内,驱动齿轮106安装于艏部回转电机108输出端,齿轮环102转动设于艏部安装筒101中并与所述艏部浮力段固连,并且所述驱动齿轮106与所述齿轮环102内侧齿形啮合。本发明工作时,所述艏部回转电机108驱动所述驱动齿轮106转动,进而驱动齿形环102带动艏部浮力段转动。
36.如图2~6所示,所述艏部安装筒101内设有齿轮限位架107,且所述驱动齿轮106前侧和后侧分别与对应侧的齿轮限位架107相抵实现轴向限位,从而使所述驱动齿轮106仅能实现旋转运动。
37.如图5所示,所述齿轮限位架107包括连接架体1071和限位环部1072,其中所述连接架体1071固设于所述艏部安装筒101中,所述限位环部1072设于连接架体1071上端并与所述驱动齿轮106对应侧壁相抵。在所述艏部安装筒101内壁上设有一圈限位板1011,如图4所示,所述驱动齿轮106后侧的齿轮限位架107下端固装于所述限位板1011上,如图5所示,所述驱动齿轮106前侧的齿轮限位架107下端固装于所述艏部安装筒101的前端面上。
38.如图2~6所示,所述艏部安装筒101前端设有卡紧环109,所述齿轮环102外壁中部设有卡槽,且所述卡紧环109卡装于所述卡槽中实现齿轮环102的轴向限位,在所述卡紧环109与所述卡槽的槽底之间设有塑性材质制成的防磨损环1091。本实施例中,所述卡紧环109包括两个卡紧半环以方便对称安装,所述防磨损环1091对应设有两个防磨损半环。
39.如图2~6所示,所述艏部浮力段包括艏部浮力材104和设于艏部浮力材104之间的艏部推进器固定筒105,并且所述艏部推进器固定筒105轴向垂直于auv轴向,两个艏部推进器103分设于所述艏部推进器固定筒105内部两端。本实施例中包括上下两块艏部浮力材104,且所述艏部推进器固定筒105设于两个艏部浮力材104之间,如图5所示,所述艏部推进器固定筒105通过抱箍1051固定。
40.如图2和图7~12所示,所述艉部回转段2的艉部浮力段包括回转支撑筒206、安装支板205、艉部浮力材204和稳定翼207,其中回转支撑筒206与艉部安装筒202转动连接,所述回转支撑筒206中部固设有安装支板205,艉部回转电机201固设于所述艉部安装筒202中,且所述艉部回转电机201输出端与所述安装支板205前端固连,所述艉部浮力材204、稳定翼207和艉部推进器203均固装于所述安装支板205上。
41.如图7~12所示,所述艉部安装筒202内设有电机固定板2021,所述艉部回转电机201固装于所述电机固定板2021中部,所述回转支撑筒206一侧设有支板固定板2061,如图12所示,所述安装支板205前端设有固定部2051,且所述固定部2051固设于所述支板固定板2061中部。
42.如图10~12所示,所述电机固定板2021靠近艉部浮力段一侧设有连接端板2022,且所述连接端板2022外壁与所述回转支撑筒206的侧筒壁2063内侧转动连接。本实施例中,在所述连接端板2022外壁与所述回转支撑筒206的侧筒壁2063之间设有塑性材质的卡紧箍209,如图9所示,所述回转支撑筒206上设有呈z型的卡紧箍入口2062,如图11所示,所述连接端板2022外壁和回转支撑筒206的侧筒壁2063内侧之间形成截面为z型的空隙,且所述空隙与所述卡紧箍入口2062连通,安装时先将回转支撑筒206的侧筒壁2063套置于艉部安装筒202的连接端板2022外侧,然后如图9所示,将长条状的卡紧箍209由所述卡紧箍入口2062敲击滑入,使卡紧箍209充满连接端板2022外壁和回转支撑筒206的侧筒壁2063内侧之间的z型空隙,从而实现所述艉部安装筒202与回转支撑筒206的轴向连接。
43.如图12所示,所述安装支板205上下两侧均垂直设有稳定翼207,并且两个稳定翼207处于同一平面上,如图10所示,所述安装支板205左右两侧均设有推进器连接架208,且所述艉部推进器203设于对应侧的推进器连接架208上,所述推进器连接器208呈折弯状以使所述艉部推进器203轴向与auv轴向形成夹角α。本实施例中共设有四块沿着圆周方向均布的艉部浮力材204,且相邻艉部浮力材204之间均形成安装间隙,所述安装支板205、稳定翼207和推进器连接架208分别设于对应的安装间隙中,所述艉部推进器203设于艉部浮力材204外侧。
44.本发明的工作原理为:
45.本发明工作时,艏部回转段1内的艏部回转电机108通过所述驱动齿轮106和齿轮环102传动使艏部浮力段360
°
转动,进而实现艏部浮力段内的艏部推进器103绕auv轴向360
°
转动,而艉部回转段2内的艉部回转电机201可以驱动艉部浮力段绕auv轴向360
°
转动,进而实现艉部浮力段两侧的艉部推进器203绕auv轴向360
°
转动,这样本发明便可以直接控制auv艏部和艉部转动实现运动控制,也即本发明可以通过空间运动直驱的方式对auv进行运动控制,无需再借助两个操作面内的运动分解和空间矢量合成实现auv空间运动控制,避免了运动分解存在的近似误差和矢量合成中的数值误差,整个操控过程响应速度高,控制系统模型较为精简。另外本发明通过对称安装的推进器消除推进器对auv的翻转力矩,可实
现自平衡稳定操控,艉部推进器203轴线与auv轴线夹角为22.5度,为auv巡航模式下的高效布置角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1