一种仿生鱼装置
1.本发明涉及仿生鱼设备技术领域,具体而言,涉及一种仿生鱼装置。
背景技术:
2.水下机器人已经大量使用在海洋探测领域中,但当前水下无人机器人大部分都是使用螺旋桨推进,螺旋桨推进存在以下缺点:
3.(1)采用螺旋桨推进装置带动水流做旋转运动,推进效率较低、能耗较高、噪声大、机动性差。
4.(2)螺旋桨旋转会在尾部产生空穴现象,高速旋转的螺旋桨会使尾部压力下降,导致海水沸腾,沸腾产生的气泡破裂会发出极大噪声严重时会产生气蚀现象。
5.(3)现有螺旋桨推进的控制方式单一,无法自主避障。
6.综上,螺旋桨推进的水下机器人效果不佳,容易对鱼群产生外部干扰,且无法自主避障,不利于水下探测。
技术实现要素:
7.本发明公开了一种仿生鱼装置,旨在改善现有水下机器人对鱼群影响大以及无法自主避障的的问题。
8.本发明采用了如下方案:
9.一种仿生鱼装置,包括鱼头部件、鱼身部件以及鱼尾部件,所述鱼头部件和鱼尾部件均可相对所述鱼身部件摆动,其中,所述鱼头部件和鱼尾部件分别通过第一摆动组件和第二摆动组件驱动;所述鱼身部件内置有沉浮件和控制件,所述沉浮件用以控制重心位置,所述控制件与所述第一摆动组件、第二摆动组件以及沉浮件均相电连接;
10.所述鱼头部件的前端设有与所述控制件相电连接的一号传感器、二号传感器和三号传感器,所述控制件被构造成在所述一号传感器或者二号传感器探测到障碍物时,驱使所述第一摆动组件和第二摆动组件作业,以使所述仿生鱼装置游动,在所述三号传感器探测到障碍物时,驱使所述沉浮组件调节中心位置,以使所述仿生鱼装置下潜或者上浮。
11.作为进一步改进,所述第一摆动组件包括舵机,所述舵机与所述控制件相电连接。
12.作为进一步改进,所述第二摆动组件包括一号电机、摆杆和摆动盘,所述一号电机与所述摆杆联动配置,所述摆动盘上设有滑动槽,所述摆杆其一端伸设于所述滑动槽内,以带动所述摆动盘摆动。
13.作为进一步改进,所述摆杆具有呈角度设置的转动部和摆动部,所述转动部与所述一号电机同轴转动,所述摆动盘与所述鱼身部件铰接,以随所述摆动部摆动。
14.作为进一步改进,所述沉浮件包括二号电机、丝杆以及配置在丝杆上的配重块,所述二号电机用以驱使丝杆转动,以使所述配重块移动。
15.作为进一步改进,所述鱼身部件与鱼头部件和鱼尾部件之间均通过波纹管连接。
16.作为进一步改进,所述一号传感器与所述二号传感器沿所述鱼头部件的中心线对
称布置,用以探测所述鱼头部件两侧的区域,所述三号传感器沿所述中心线凸起设置,用以探测所述鱼头部件前方的区域。
17.作为进一步改进,所述一号传感器、二号传感器和三号传感器均为漫反射红外传感器。
18.通过采用上述技术方案,本发明可以取得以下技术效果:
19.本技术的仿生鱼装置,通过设置鱼头部件和鱼尾部件相对鱼身部件摆动,以模仿鱼类在水下的运动,从而降低仿生鱼装置在水下运动或者监测时对鱼群的影响。另外通过控制件接收感应器信号,驱使第一摆动组件、第二摆动组件,沉浮件等做出相应调节,实现自主避障,有利于水下探测工作。
附图说明
20.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
21.图1是本发明其中一实施例的结构示意图;
22.图2是图1在另一视角下的结构示意图;
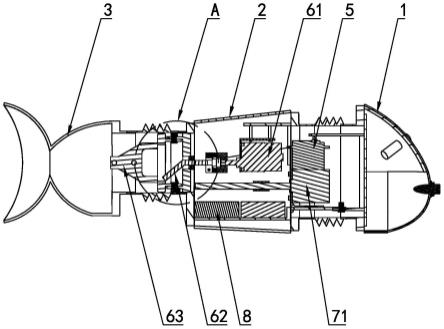
23.图3是图1沿其中一截面的剖视图;
24.图4是图3中a的放大图;
25.图5是本发明其中一实施例的摆动盘的结构示意图;
26.图6是图1沿另一截面的剖视图。
27.图标:
28.1-鱼头部件;
29.2-鱼身部件;
30.3-鱼尾部件;
31.4-波纹管;
32.5-舵机;
33.61-一号电机;62-摆杆;621-转动部;622-摆动部;63-摆动盘;631-滑动槽;
34.71-二号电机;72-丝杆;73-配重块;74-导杆;
35.8-控制件;
36.91-一号传感器;92-二号传感器;93-三号传感器。
具体实施方式
37.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,
本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
38.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
40.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
41.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
42.实施例
43.结合图1至图6,本实施例提供了一种仿生鱼装置,包括鱼头部件1、鱼身部件2以及鱼尾部件3,鱼身部件2与鱼头部件1、鱼身部件2与鱼尾部件3之间均通过波纹管4连接,以保证鱼头部件1和鱼尾部件3的自由度。具体地,鱼头部件1和鱼尾部件3分别通过第一摆动组件和第二摆动组件驱动以相对鱼身部件2摆动。第一摆动组件包括舵机5(舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统),通过舵机5驱动鱼头部件1摆动,其中舵机的工作原理为现有技术,在此不再赘述。第二摆动组件包括一号电机61、摆杆62和摆动盘63,一号电机61与摆杆62联动配置,摆杆62具有呈角度设置的转动部621和摆动部622,转动部621与一号电机61同轴转动,摆动盘63与鱼身部件2的内壁铰接,摆动盘63上设有滑动槽631,摆杆62设有摆动部622的一端伸设于滑动槽631内,以在一号电机61转动时,驱使摆动盘63随所述摆动部622摆动。
44.鱼身部件2内置有沉浮件、控制件8以及电源,沉浮件用以控制重心位置,控制件8与电源、第一摆动组件、第二摆动组件以及沉浮件均相电连接。优选地,沉浮件包括二号电机71、丝杆72以及配置在丝杆72上的配重块73。丝杆72与二号电机71同步转动,配重块73与丝杆72螺纹连接,沿配重块73两端对称设置有两个贯穿配重块73的导杆74,以使丝杆72的圆周运动转化为配重块73的直线运动,从而通过控制二号电机71转动,驱使配重块73移动,实现重心位置的调节,进而控制整个仿生鱼装置的上浮或者下潜。
45.鱼头部件1的前端设有与控制件8相电连接的一号传感器91、二号传感器92和三号传感器93,控制件8被构造成在一号传感器91或者二号传感器92探测到障碍物时,驱使第一摆动组件和第二摆动组件作业,以使仿生鱼装置整体游动避障;在三号传感器93探测到障碍物时,驱使沉浮组件调节重心位置,以使仿生鱼装置下潜或者上浮避障。较佳地,一号传感器91与二号传感器92沿鱼头部件1的中心线对称布置(相当于鱼眼的位置),用以探测鱼头部件1两侧的区域,三号传感器93沿所述中心线凸起设置(相当于鱼嘴的位置),用以探测鱼头部件1前方的区域。其中,一号传感器91、二号传感器92和三号传感器93均为漫反射红外传感器。需要提到的是,关于控制件8与各部件之间电路连接原理为现有技术,在此不再赘述。
46.本实施例的工作方式为:通过一号传感器91、二号传感器92和三号传感器93探测水下障碍物所处的位置,传感器将探测到的信号传输至控制件8(例如单片机等),以使控制件8驱使相应部件作业。当一号传感器91或者二号传感器92探测到障碍物时,控制件8驱使舵机5控制鱼头部件1转向,同时驱使一号电机61带动鱼尾部件3摆动,使得仿生鱼装置整体游动。当三号传感器93探测到障碍物时,控制件8驱使二号电机71正转或者反正转以调节配重块73的位置,使得仿生鱼装置上浮或者下潜。从而实现仿生鱼装置的自主避障。
47.需要说明的是,本实施例通过设置鱼头部件1和鱼尾部件3相对鱼身部件2,以模仿鱼类在水下的运动,从而减小仿生鱼装置在水下运动时对鱼群的影响。另通过控制件8接收感应器信号,驱使第一摆动组件、第二摆动组件,沉浮件等做出相应调节,实现自主避障,以便于仿生鱼装置的水下作业。
48.在上述实施例的基础上,还可在鱼身部件2内装配蓝牙模块等功能性模块,以满足用户不同的使用需求。
49.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1