海洋风电场海底海缆快速敷设机器人
1.本发明涉及海洋装备的技术领域,具体涉及一种海洋风电场海底海缆快速敷设机器人。
背景技术:
2.近几年,全球范围内开展进行节能减排运动,而风能作为最重要的几个可再生能源之一,风力发电自然得到了大力发展。其中,海上风力资源丰富,为了更好的利用这一资源,越来越多的海上风电场被建立。随之,也带来了一系列技术上的难题,例如海底电缆的敷设。
3.海底电缆的敷设,远比陆地上的电缆敷设要多难得多。海上作业需要克服大风、深水、激流、浓雾、穿越五大困难,再加上海上天气多变、风浪大、海底能见度低,大大增加了海缆敷设的难度。目前,在国内沿海海上风电项目海缆施工过程中,主要采用“边敷边埋”冲埋式埋设犁施工法——通过埋设犁(水力开沟机)泵送高压水,在海底冲出一条沟槽的同时,将海缆平铺下去,然后利用在潮汐作用下海床面自行回填(必要时采取压盖保护施工)。主要施工步骤包括:埋深施工船锚泊就位
→
缆盘内电缆提升
→
电缆放入甲板入水槽
→
电缆放入埋设机腹部
→
投放埋设机至海床面
→
牵引施工船敷埋电缆
→
回收埋设机至船甲板
→
终端登陆升压站/换流站平台。但该方法的施工限制因素较多,而且施工风险大。随着海上风电项目的发展,长距离的海缆敷设项目也越多,现有的施工方法很难保证其施工质量和安全,改进现有的施工方法是目前亟需解决的问题。
4.另外,随着风电场的建设,近海岸区的风电场已经接近饱和,这也迫使风电场的建设逐渐走向深海区。随之,海缆的铺设长度也大大增加,由单回路长度10km逐渐发展到100km,在增加工作难度的同时也大大增加了作业工时。反观实际情况,现有的船机设备水平和地质,仅在海况条件良好的情况下才能施工,而每年满足这一条件的时间并不多。以广东阳江施工项目为例,每年的施工窗口期仅在6、7月份之后到10月底前,而这个时期恰是台风频繁登陆的季节,导致作业天数进一步缩短。
5.目前,海上风电场的建立,如果施工效率低、项目施工时间长,会造成巨大的经济损失。因此,在保证电缆敷设的安全和质量的前提下,提高敷设效率是十分有必要的。
技术实现要素:
6.本发明的目的在于克服上述背景技术的不足,提供一种海洋风电场海底海缆快速敷设机器人,具备水下作业和海缆快速敷设的能力,有效的提高海缆敷设的安全性和质量。
7.为实现上述目的,本发明所设计的一种海洋风电场海底海缆快速敷设机器人,包括机器人本体,所述机器人本体的上方设置有用于控制其上下浮动的浮力调节机构,所述机器人本体的前进侧设置有用于深入泥沙开设沟槽的开槽机构,所述机器人本体的中部设置有用于在沟槽内敷设海缆的敷设机构,所述机器人本体的后侧设置有用于向沟槽内的海缆掩埋泥沙的掩埋机构,所述机器人本体的下方设置有履带行走机构,所述机器人本体上
还设置有用于向其提供动力的推进机构。
8.进一步地,所述浮力调节机构包括浮力层和浮力调节装置,所述浮力层设置在机器人本体的顶部,所述浮力调节装置用于对浮力层加热以使得其膨胀提供浮力。
9.进一步地,所述开槽机构包括螺旋开槽装置、开槽电机以及开槽电动推杆;
10.所述螺旋开槽装置呈锥形状,所述螺旋开槽装置的外壁环绕设置有若干圈螺旋刀片;所述开槽电机设置在螺旋开槽装置的顶部用于驱动其旋转;
11.所述开槽电动推杆通过若干个安装杆安装在机器人本体的前进侧,所述开槽电动推杆的驱动端连接开槽电机的顶端用于驱动螺旋开槽装置和开槽电机上下移动。
12.进一步地,所述敷设机构包括海缆输送装置、输送装置电机、电动推杆以及双面犁;
13.所述海缆输送装置包括用于夹持输送海缆的主动轮和从动轮,所述主动轮与从动轮之间设置有用于夹持海缆的夹持空间;所述主动轮安装于设置在双面犁下方的支撑柱上,所述从动轮上设置有连杆;所述连杆的一端与从动轮转动连接,所述连杆的另一端与支撑柱铰接;所述连杆与支撑柱之间连接有压紧弹簧;
14.所述输送装置电机用于驱动主动轮旋转与从动轮夹持配合以输送海缆;所述电动推杆的上端安装在机器人本体上,所述电动推杆的下端与双面犁连接;所述双面犁设置在主动轮的上方,且双面犁的侧壁向下延伸至主动轮的两侧。
15.进一步地,所述机器人本体的上方设置有用于供海缆贯穿通过的海缆导管,所述海缆导管的两侧设置有用于引导海缆的海缆导轮;所述机器人本体内设置有若干个密封舱。
16.进一步地,所述海缆导管设置在敷设机构的上方,所述海缆导管内贯穿通过的海缆向下延伸穿过敷设机构的主动轮与从动轮之间的夹持空间。
17.进一步地,所述掩埋机构包括掩埋转轮和掩埋电机,所述掩埋电机设置在机器人本体的后侧用于驱动掩埋转轮转动以带动泥沙落入沟槽内部掩埋海缆。
18.进一步地,所述履带行走机构包括履带主动轮、履带从动轮、履带以及履带电机;所述履带电机用于驱动履带主动轮转动,所述履带主动轮通过履带带动履带从动轮转动。
19.再进一步地,所述推进机构包括垂向推进器和水平推进器,所述垂向推进器设置在机器人本体的顶部用于驱动其上浮与下潜;所述水平推进器设置在机器人本体的中部用于驱动其水平移动。
20.更进一步地,所述机器人本体的前进侧设置有前置摄像头,所述机器人本体的后侧设置有后置摄像头和探照灯。
21.与现有技术相比,本发明具有如下优点:
22.其一,本发明海洋风电场海底海缆快速敷设机器人的功能齐全,机器人只需按照预定的轨迹行驶一遍即可实现开槽、敷设、掩埋的工作,大大的减少工作时间,提高工作效率和安全,实用性更强。
23.其二,本发明的开槽方式采用的方式是电动旋转开槽,相比较传统的高压水枪开槽,具有效率高、不会至水浑浊等优点,开槽后即可敷设海缆,而且能有效的减少泥沙的飞溅,提高可见度,保证施工顺利进行。
24.其三,本发明的海缆并未直接由机器人附带,而是放置在dp船上,在铺设过程中,
海缆穿过海缆导管,然后再穿过海缆输送装置,输送装置电机带动主动轮转动,从动轮提供压力,保证海缆平稳的输送。海缆敷设装置装备电动推杆,在敷设时直接将海缆输送装置置于沟槽底部,更好的实现海缆的敷设。
25.其四,本发明的敷设机构中,不仅考虑敷设的位置,直接将海缆敷设在槽道底部,而且设置双面犁,清理槽道覆盖的泥沙,又可以保护海缆输送装置的主动轮不被卡死。
26.其五,本发明直接在机器人的后面安装掩埋装置,每个掩埋转轮都是向内旋转的,布置在槽道的两边,转轮转动时,将开槽时的泥沙再次推入槽道,掩埋海缆,能有效地减少工作时间,提高了敷设的效率。
27.其六,本发明的机器人具有两套动力系统,分别是推进机构和履带行走机构,垂向推进器为机器人的上浮和下潜提供动力,同时在敷设作业时,持续下发垂向推力,保证机器人在工作时有足够的摩擦力。水平推进器则为机器人水平移动提供动力,防止机器人下潜时随海流而移动,能保证在下潜过程中,机器人运动到指定的工作区域。平面运动系统采用履带方式,适合海底的复杂情况,主要应用于敷设工作时机器人的移动,结合垂向推进器提供的压力,保证履带与海底的摩擦力,确保机器人有着良好的工作环境。
28.其七,本发明的浮力调节机构可以减少机器人回收消耗的能量。回收时,通过调节浮力,机器人能更好的减小能耗。浮力调节装置采用的是热膨胀方法,采用电加热的方式,使材料膨胀,提供浮力。
29.其八,本发明配置有置摄像头、后置摄像头以及探照灯,沉底之后,履带开始工作,前置摄像头回传图像信息,操作人员根据信息调整位置。掩埋结束后,后置摄像头会把掩埋的图像回传给岸端,由工作人员进行掩埋效果评价。为了更好的获得掩埋的视频,机器人配置了探照灯,能有效地保证回传图像的清晰度。
附图说明
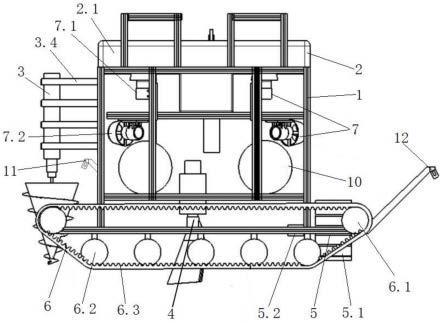
30.图1为一种海洋风电场海底海缆快速敷设机器人的结构示意图;
31.图2为图1所示海洋风电场海底海缆快速敷设机器人的俯视结构示意图;
32.图3为开槽机构的结构示意图;
33.图4为敷设机构的结构示意图;
34.图5为海缆输送装置的结构示意图;
35.图6为海洋风电场海底海缆快速敷设机器人在工作状态时的结构示意图;
36.图7为海洋风电场海底海缆快速敷设机器人的电路控制示意图;
37.图8为海洋风电场海底海缆快速敷设机器人的工作流程示意图;
38.图中,机器人本体1、浮力调节机构2、浮力层2.1、浮力调节装置2.2、开槽机构3、螺旋开槽装置3.1、开槽电机3.2、开槽电动推杆3.3、安装杆3.4、敷设机构4、海缆输送装置4.1、主动轮4.11、从动轮4.12、支撑柱4.13、连杆4.14、压紧弹簧4.15、输送装置电机4.2、电动推杆4.3、双面犁4.4、掩埋机构5、掩埋转轮5.1、掩埋电机5.2、履带行走机构6、履带主动轮6.1、履带从动轮(6.2).2、履带6.3、履带电机6.4、推进机构7、垂向推进器7.1、水平推进器7.2、海缆导管8、海缆导轮9、密封舱10、前置摄像头11、后置摄像头12、探照灯13、海缆14、dp船15。
具体实施方式
39.下面结合实施案例详细说明本发明的实施情况,但它们并不构成对本发明的限定,仅作举例而已。同时通过说明本发明的优点将变得更加清楚和容易理解。
40.如图1所示的一种海洋风电场海底海缆快速敷设机器人,包括机器人本体1,机器人本体1为由铝合金型材连接而成的框架结构,具有较好的耐腐蚀性能,其强度也满足设计要求,另外采用型材的方式来搭建框架,能有效的减少质量及机器人移动时的阻力。机器人本体1的上方设置有用于控制其上下浮动的浮力调节机构2,机器人本体1的前进侧设置有用于深入泥沙开设沟槽的开槽机构3,机器人本体1的中部设置有用于在沟槽内敷设海缆的敷设机构4,机器人本体1的后侧设置有用于向沟槽内的海缆掩埋泥沙的掩埋机构5,机器人本体1的下方设置有履带行走机构6,机器人本体1上还设置有用于向其提供动力的推进机构7。
41.如图2所示,浮力调节机构2包括浮力层2.1和浮力调节装置2.2,浮力层2.1设置在机器人本体1的顶部,浮力调节装置2.2用于对浮力层2.1加热以使得其膨胀提供浮力。采用本发明的浮力调节机构2,可以减少机器人回收消耗的能量。回收时,通过调节浮力,机器人能更好的减小能耗。浮力调节装置2.2采用的是热膨胀方法,采用电加热的方式,使材料膨胀,提供浮力。
42.如图3所示,开槽机构3包括螺旋开槽装置3.1、开槽电机3.2以及开槽电动推杆3.3;螺旋开槽装置3.1呈锥形状,螺旋开槽装置3.1的外壁环绕设置有若干圈螺旋刀片;开槽电机3.2设置在螺旋开槽装置3.1的顶部用于驱动其旋转;开槽电动推杆3.3通过若干个安装杆3.4安装在机器人本体1的前进侧,开槽电动推杆3.3的驱动端连接开槽电机3.2的顶端用于驱动螺旋开槽装置3.1和开槽电机3.2上下移动。
43.本实施例的开槽机构3采用的方式是电动旋转开槽,相比较传统的高压水枪开槽,具有效率高、不会至水浑浊等优点,开槽后即可敷设海缆。开槽机构3工作时,首先开槽电机3.2驱动螺旋开槽装置3.1旋转,紧接着开槽电机3.2伸长,在垂向推进器7.1的垂向施压下,螺旋开槽装置3.1深入泥沙之下,随着机器人的移动,即可开出一条沟槽。工作时,开槽电机3.2带动螺旋开槽装置3.1转动,转动过程中,会把槽道的泥沙分散到两边,形成一条满足要求的沟槽。开槽电动推杆3.3则是控制开槽的深度,电动推杆越长,开的沟槽越深。
44.如图4和图5所示,敷设机构4包括海缆输送装置4.1、输送装置电机4.2、电动推杆4.3以及双面犁4.4;海缆输送装置4.1包括用于夹持输送海缆14的主动轮4.11和从动轮4.12,主动轮4.11与从动轮4.12之间设置有用于夹持海缆14的夹持空间;主动轮4.11安装于设置在双面犁4.4下方的支撑柱4.13上,从动轮4.12上设置有连杆4.14;连杆4.14的一端与从动轮4.12转动连接,连杆4.14的另一端与支撑柱4.13铰接;连杆4.14与支撑柱4.13之间连接有压紧弹簧4.15;输送装置电机4.2用于驱动主动轮4.11旋转与从动轮4.12夹持配合以输送海缆14;电动推杆4.3的上端安装在机器人本体1上,电动推杆4.3的下端与双面犁4.4连接;双面犁4.4设置在主动轮4.11的上方,且双面犁4.4的侧壁向下延伸至主动轮4.11的两侧。
45.本实施例中,为减轻负重海缆14并未直接由机器人附带,而是放置在dp船上。在铺设过程中,海缆穿过海缆导管8,然后再穿过海缆输送装置4.1,输送装置电机4.2带动主动轮4.11转动,从动轮4.12提供压力,保证海缆平稳的输送。为了更好的实现海缆的敷设,海
缆敷设装置装备电动推杆4.3,在敷设时直接将海缆输送装置4.1置于沟槽底部。敷设的时候,海缆14始终处于沟槽底部,有利于后期的掩埋。主动轮采用电机驱动的方式,很容易受到泥沙的影响,泥沙的进入容易导致主动轮卡死,烧毁电机。因此设计了双面犁4.4的结构,既可以及时清理槽道滚入的泥沙,又可以保护海缆输送装置4.1不会因为泥沙而卡死,有效的保护了海缆输送装置的主动轮。电动推杆是用来控制敷设的高度,以确保敷设装置的底部与槽道底部高度接近,使得线缆张紧效果更好。
46.上述技术方案中,机器人本体1的上方设置有用于供海缆14贯穿通过的海缆导管8,海缆导管8的两侧设置有用于引导海缆的海缆导轮9;机器人本体1内设置有若干个密封舱10。海缆导管8设置在敷设机构4的上方,海缆导管8内贯穿通过的海缆14向下延伸穿过敷设机构4的主动轮4.11与从动轮4.12之间的夹持空间。本实施例中,电气控制系统主要布置在两个密封舱10中,其中一个密封舱用来布置电源转换装置,包括水下变压器、稳压模块以及各类分线盒,为各用电器提供电能。另外一个密封舱则主要用来放置工控机、各装置的驱动模块以及视频数据采集盒,是同岸端通讯与机器人控制指令下发的核心。工作方式为:工控机接收岸端信号,发布指令至各个驱动模块,或者获取视频信息,反馈至岸端。
47.上述技术方案中,掩埋机构5包括掩埋转轮5.1和掩埋电机5.2,掩埋电机5.2设置在机器人本体1的后侧用于驱动掩埋转轮5.1转动以带动泥沙落入沟槽内部掩埋海缆。掩埋装置是用以掩埋线缆,位于在机器人的尾部,每个掩埋转轮都是向内旋转的,布置在槽道的两边。转轮转动时,将开槽时的泥沙再次推入槽道,掩埋海缆。本实施例中,掩埋装置由掩埋电机5.2和掩埋转轮5.1构成,掩埋电机5.2驱动掩埋转轮5.1转动,掩埋转轮带动泥沙,使泥沙落入沟槽内部,起到掩埋的效果。
48.上述技术方案中,履带行走机构6包括履带主动轮6.1、履带从动轮6.2、履带6.3以及履带电机6.4;履带电机6.4用于驱动履带主动轮6.1转动,履带主动轮6.1通过履带6.3带动履带从动轮6.2转动。履带行走机构是机器人工作时候运动的主要动力源。工作时,所受的阻力较大,仅靠推进系统无法满足要求。因此采用履带的方式,同时垂向推进器发力,保证履带足够的摩擦力,为工作提供动力。工作时,履带电机6.4驱动履带主动轮6.1转动,随即,带动履带6.3的运动,履带从动轮6.2受履带摩擦力作用开始转动,起支撑作用。
49.上述技术方案中,推进机构7包括垂向推进器7.1和水平推进器7.2,垂向推进器7.1设置在机器人本体1的顶部用于驱动其上浮与下潜;水平推进器7.2设置在机器人本体1的中部用于驱动其水平移动。本发明的机器人具有两套动力系统,分别是推进机构和履带行走机构。在机器人下潜时,主要依靠推进系统进行位置的调整,推进系统又包括垂向推进器7.1和水平推进器7.2。本实施例中,垂向推进器7.1布置在机器人的顶部,采用垂直布置的方式,一共四个,除了能够控制机器人的上浮下潜之外,还可以减小下潜过程中的横摇和纵摇。水平推进器7.2是用来调整下潜过程中的位置的,机器人下潜过程中,会受洋流的影响,水平推进器7.2的作用就是保证机器人能运动到指定位置。
50.本实施例中,推进机构设有八个推进器,其中四个为垂向推进器,另外四个为水平推进器。垂向推进器为机器人的上浮和下潜提供动力,同时在敷设作业时,持续下发垂向推力,保证机器人在工作时有足够的摩擦力。除此之外,机器人装载惯导设备,结合垂向推进器,能保证机器人下潜时的平稳性。水平推进器则为机器人水平移动提供动力,防止机器人下潜时随海流而移动,能保证在下潜过程中,机器人运动到指定的工作区域。平面运动系统
采用履带方式,适合海底的复杂情况,主要应用于敷设工作时机器人的移动,结合垂向推进器提供的压力,保证履带与海底的摩擦力,确保机器人有着良好的工作环境。
51.上述技术方案中,机器人本体1的前进侧设置有前置摄像头11,机器人本体1的后侧设置有后置摄像头12和探照灯13。沉底之后,履带开始工作,前置摄像头11回传图像信息,操作人员根据信息调整位置。掩埋结束后,后置摄像头12会把掩埋的图像回传给岸端,由工作人员进行掩埋效果评价。为了更好的获得掩埋的视频,机器人配置了探照灯13,能有效地保证回传图像的清晰度。
52.本发明的电气控制系统主要包括两部分,分别是供电系统和通讯系统,如图7所示。由于机器人的工作时间较长,如果采用内置电源,不仅会限制工作时长,而且会由于重量的增加而增大能耗。因此采用岸端供电的方式,由dp船通过脐带缆,直接将电能输送给机器人。变压器和整流器以及稳压器放置在密封舱10内部,变压器将220v交流电降低到36v,经过整流器,转换成直流电,最后经过稳压器,输出合适的电压。在整个供电系统中,部分装置功耗较大,需要稳压器供电,例如工控机、电调、探照灯等,对于一些功耗较小的,例如摄像头、惯导、深度计、单片机等,可由工控机直接供电。
53.通讯系统是整个装置软件系统的核心,机器人采用的是遥控方式。岸端控制核心接收有线或者无线的遥控设备信息,通过脐带缆下发给机器人的工控机。目前,采用的是脐带缆方式进行通讯。工控机接收信号之后,会根据信号向单片机发送指令。随之,单片机输出不同的pwm波或者电平来控制电机和电动推杆以及探照灯的光照强度。同样的,深度计获取水底压强后,返回至单片机,单片机再进行解算,得出准确的深度信息,反馈给工控机。摄像头同样将获取的信息发送给工控机。惯导也输出角度和加速度信息,在工控机解包之后,将角度、加速度、图像以及深度信息回传给岸端控制核心。操作人员在获取这些信息之后,才能更好的控制水下机器人。
54.本发明海洋风电场海底海缆快速敷设机器人的工作方法:
55.如图6所示,由dp船携带机器人和即将敷设的海缆,运输至指定区域后吊放机器人。海缆放置于dp船上,一端则放置于机器的敷设装置上,随着机器人潜入海底,在机器人工作时,不断地释放海缆。整个系统包括dp船15、脐带缆和机器人。dp船负责机器人的运输及为机器人提供电能,同时与机器人之间保持通讯。机器人的供电及与dp船的通讯是通过脐带缆实现的。工作时,dp船上的工作人员通过遥控控制机器人,同时监控机器人的敷设效果。
56.机器人和海缆由dp船携带,运至指定区域之后开始释放,其中海缆一端固定在机器人上。释放之后,机器人在重力和垂向推进器共同的作用下下沉。同时,水平推进器工作,确保机器人运动至指定位置附近。沉底之后,履带开始工作,前置摄像头回传图像信息,操作人员根据信息调整位置。随即,开槽系统开始工作,一边旋转,一边伸长电动推杆,旋转开槽装置逐渐深入至指定位置,为了保证足够的压力,确保开槽装置深入海床,在工作时,垂向推进器向下发力,提供足够的压力。之后,岸端工作人员开始遥控驱动履带工作,机器人缓慢前移,移动一小段位置之后,海缆敷设装置开始工作。电动推杆伸长,保证海缆输送装置位于槽道底部,随着机器人的前移,海缆输送装置主动轮开始转动,带动海缆的释放。紧接着,掩埋装置开始工作,在电机的转动下,带动转轮的转动,将沙土重新推进沟槽,并且由于机器人移动速度不快,可以更加有效的观测敷设和掩埋效果。在操作人员的控制下,只需
按照预定的轨迹行驶一遍即可完成敷设。最后,对机器人进行回收,完成作业,具体流程如图8所示。
57.以上,仅为本发明的具体实施方式,应当指出,任何熟悉本领域的技术人员在本发明所揭示的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内,其余未详细说明的为现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1