一种水下无线可视探测设备的制作方法
1.本发明涉及水下机器人技术领域,具体涉及一种水下无线可视探测设备。
背景技术:
2.可移动的无人水下探测设备可分为有线和无线两类,设备的整体密度一般设计成与水体密度近似,依靠桨叶带动设备在水中的各个方向移动(包括上浮下沉),有线探测机器人虽然可直接通过导线从水面进行供电,但是其探测范围被导线限制,且导线同时会限制水下机器人灵活性,而现有的无线探测机器人虽然没有导线限制,探测和移动更加灵活,但是机器人本身需要自带电池,供电量有限,动力较弱,这就导致设备一旦在水中被水草或其它物体缠住,难以挣脱上浮,且一旦设备电量耗尽或桨叶故障失去动力上浮,则难以进行回收,需要人工下潜捕捞,较为麻烦。
技术实现要素:
3.为了克服上述的技术问题,本发明的目的在于提供一种水下无线可视探测设备,通过压缩气罐、充气罐和叶轮的设置,当电量较低时,打开电控阀门,压缩气罐内的气体通过气管二吹动叶轮,从而通过叶轮加速轴杆一转动,从而增加推进桨叶的转速,增加推进力,气流吹过叶轮后通过连通管一和气管一进入充气罐内,将充气罐内的水体向外排出,由于充气罐内的水体被部分排出,从而使设备整体浮力增加,使得该设备自动上浮,减少设备回程时的耗电量,同时气体从连通管二向后喷出,从而辅助推动主体前进,通过压缩气罐和充气罐的配合所提供的浮力与推力,增加设备挣脱水草或其他物体缠绕的能力,使得设备在电量耗尽时,依然能够依靠压缩气罐提供的气体上浮和前进一段距离,从而降低设备丢失的风险,方便设备回收。
4.本发明的目的可以通过以下技术方案实现:
5.一种水下无线可视探测设备,包括主体,所述主体的底端两侧均固连有压缩气罐,所述主体的尾端中间位置固连有壳件,所述壳件的一内侧壁两侧均固连有环形件,所述压缩气罐的一端连通有气管二,所述气管二的一端贯穿壳件的底侧并与邻近位置的环形件的环形外侧壁底端一侧连通,两个所述环形件的环形外侧壁顶端相互靠近的一侧之间连通有连通管一,所述主体的顶面中间位置固连有充气罐,所述充气罐与连通管一连通,所述壳件的环形外侧壁两侧均设置有整流罩,所述整流罩内设置有推进桨叶,所述壳件的另一内侧壁固连有两个与推进桨叶一一对应的驱动模块,所述驱动模块包括电机一,所述电机一的输出端固连有轴杆一,所述轴杆一的一端延伸至紧邻位置的环形件内部,所述轴杆一的一端固定套接有叶轮,所述轴杆一与对应推进桨叶之间传动连接有传动机构,所述壳件的另一内侧壁两侧均固连有用于调节整流罩倾角的倾角调节机构,所述主体的前端中间位置安装有摄像探头,用于进行拍摄,当电量较低时,压缩气罐内的气体通过气管二吹动叶轮,从而通过叶轮加速轴杆一转动,从而增加推进桨叶的转速,增加推进力,气流吹过叶轮后通过连通管一和气管一进入充气罐内,将充气罐内的水体向外排出,由于充气罐内的水体被部
分排出,从而使设备整体浮力增加,使得该设备自动上浮,从而避免因电量限制导致的设备无法移动至水面,减少设备回程时的耗电量,方便设备上浮回收,减少设备丢失的风险。
6.进一步在于:所述整流罩的环形外侧壁靠近壳件的一侧固定连通有套管一,所述套管一的一端贯穿壳件的外侧壁并延伸至壳件内部,所述套管一与壳件之间转动连接,所述倾角调节机构包括电机二,所述电机二的一端与壳件的另一内侧壁固连,所述电机二的输出端固连有转轴,所述转轴的一端外侧壁固定套接有蜗杆,所述套管一的一端外侧壁固定套接有蜗轮,所述蜗杆与蜗轮啮合,所述转轴的一端转动连接有转动座,所述转动座的一端与壳件环形内侧壁固连,电机二带动转轴转动,转轴通过蜗杆带动蜗轮转动,蜗轮带动套管一转动,从而调整整流罩的角度,改变推进桨叶的推进角度。
7.进一步在于:所述传动机构包括套管二,所述套管二与套管一内壁固定套接,所述套管二背离壳件的一端固定连通有防水罩,所述套管二的另一端转动套接有轴杆三,所述轴杆一的环形外侧壁固定套接有锥齿轮一,所述防水罩的一端内侧壁转动连接有轴杆二,所述轴杆二的一端贯穿防水罩的另一端并与紧邻位置推进桨叶固定套接,所述轴杆二的一端环形外侧壁固定套接有锥齿轮二,所述轴杆三的环形外侧壁两端均转动连接有锥齿轮三,且一个锥齿轮三与锥齿轮一啮合,另一锥齿轮三与锥齿轮二啮合,电机一带动轴杆一转动,轴杆一通过锥齿轮一带动轴杆三转动,轴杆三通过锥齿轮二带动轴杆二转动,轴杆二带动推进桨叶转动,从而推动主体前进。
8.进一步在于:所述主体的前端两侧位置均安装有垂直推动模块,通过垂直推动模块控制主体的仰俯角度。
9.进一步在于:所述气管二的一端外侧壁安装有电控阀门,通过电控阀门控制气管二的连通。
10.进一步在于:所述充气罐背离壳件的一端底侧固定连通有气管一,所述气管一的一端贯穿壳件并与连通管一,所述充气罐的内壁滑动连接有活塞板,所述充气罐的另一端固定套接有连通管二,活塞板的内壁滑动连接有通气管,所述通气管背离连通管二的一端封闭,所述通气管的一端环形外侧壁开设有侧孔,所述通气管的另一端环形外侧壁与活塞板之间设置有复位弹簧,所述复位弹簧与通气管滑动连接,气流吹过叶轮后通过连通管一和气管一进入充气罐内,气体推动活塞板推进从一端滑动至另一端,将充气罐内的水体从泄压孔和连通管二向外排出,从而辅助推动主体,至连通管二与通气管接触后,活塞板被气压挤压继续向另一端移动,通气管上的侧孔移动至活塞板的一侧,使得充气罐的一端与连通管二连通,气体从连通管二向后喷出,从而辅助推动主体,同时由于充气罐内的水体被部分排出,从而使设备浮力增加,使得该设备自动上浮。
11.进一步在于:所述充气罐的另一端端面开设有泄压孔,所述充气罐的一端连通有手动阀门,设备完全浮出水面后,关闭电控阀门,在再次使用时,手动将手动阀门打开,将设备浸入水中,由于手动阀门位置高度高于连通管二和泄压孔,水流进过连通管二和泄压孔进入充气罐内部,并在水压作用下推动活塞板朝充气罐一端移动,将充气罐一端的气体从手动阀门排出,使得充气罐内重新充入水体,方便在次使用。
12.进一步在于:所述通气管的另一端内径与连通管二的外径相同,便于通气管的一端与连通管二套接。增加通气管与连通管二之间的密封性。
13.本发明的有益效果:
14.1、通过压缩气罐、充气罐和叶轮的设置,当电量较低时,压缩气罐内的气体通过气管二吹动叶轮,从而通过叶轮加速轴杆一转动,从而增加推进桨叶的转速,增加推进力,气流吹过叶轮后通过连通管一和气管一进入充气罐内,将充气罐内的水体向外排出,由于充气罐内的水体被部分排出,从而使设备整体浮力增加,使得该设备自动上浮,减少设备回程时的耗电量,方便设备上浮回收,减少设备丢失的风险;
15.2、通过活塞板和连通管二的设置,气流吹过叶轮后通过连通管一和气管一进入充气罐内,气体推动活塞板推进从一端滑动至另一端,将充气罐内的水体从泄压孔和连通管二向外排出,从而辅助推动主体,至连通管二与通气管接触后,活塞板被气压挤压继续向另一端移动,通气管上的侧孔移动至活塞板的一侧,使得充气罐的一端与连通管二连通,气体从连通管二向后喷出,从而辅助推动主体前进,减少回程耗电量,同时通过压缩气罐和充气罐的配合所提供的浮力与推力,增加设备挣脱水草或其他物体缠绕的能力。
附图说明
16.下面结合附图对本发明作进一步的说明。
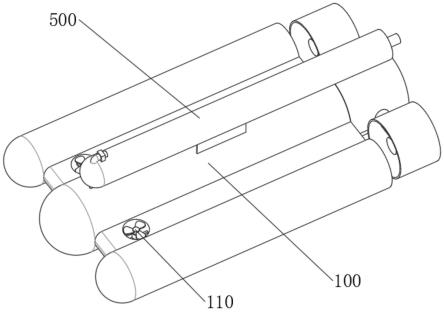
17.图1是本发明整体结构示意图;
18.图2是本发明整体底部结构示意图;
19.图3是本发明中壳件位置示意图;
20.图4是本发明中充气罐结构示意图;
21.图5是本发明中活塞板结构示意图;
22.图6是本发明中环形件内部结构示意图;
23.图7是本发明中壳件内部剖面结构示意图;
24.图8是本发明中传动机构结构示意图。
25.图中:100、主体;110、垂直推动模块;200、壳件;210、环形件;220、连通管一;230、整流罩;231、套管一;240、推进桨叶;250、驱动模块;251、电机一;252、轴杆一;253、锥齿轮一;254、叶轮;300、传动机构;310、防水罩;320、套管二;330、轴杆二;331、锥齿轮二;340、轴杆三;341、锥齿轮三;400、倾角调节机构;410、电机二;420、转轴;421、转动座;430、蜗杆;440、蜗轮;500、充气罐;510、气管一;520、连通管二;530、活塞板;540、通气管;541、侧孔;550、复位弹簧;560、手动阀门;570、泄压孔;600、压缩气罐;610、气管二;620、电控阀门。
具体实施方式
26.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
27.请参阅图1-8所示,一种水下无线可视探测设备,包括主体100,主体100的底端两侧均固连有压缩气罐600,主体100的尾端中间位置固连有壳件200,壳件200的一内侧壁两侧均固连有环形件210,压缩气罐600的一端连通有气管二610,气管二610的一端贯穿壳件200的底侧并与邻近位置的环形件210的环形外侧壁底端一侧连通,两个环形件210的环形外侧壁顶端相互靠近的一侧之间连通有连通管一220,主体100的顶面中间位置固连有充气
罐500,充气罐500与连通管一220连通,壳件200的环形外侧壁两侧均设置有整流罩230,整流罩230内设置有推进桨叶240,壳件200的另一内侧壁固连有两个与推进桨叶240一一对应的驱动模块250,驱动模块250包括电机一251,电机一251的输出端固连有轴杆一252,轴杆一252的一端延伸至紧邻位置的环形件210内部,轴杆一252的一端固定套接有叶轮254,轴杆一252与对应推进桨叶240之间传动连接有传动机构300,壳件200的另一内侧壁两侧均固连有用于调节整流罩230倾角的倾角调节机构400,当电量较低时,压缩气罐600内的气体通过气管二610吹动叶轮254,从而通过叶轮254加速轴杆一252转动,从而增加推进桨叶240的转速,增加推进力,气流吹过叶轮254后通过连通管一220和气管一510进入充气罐500内,将充气罐500内的水体向外排出,由于充气罐500内的水体被部分排出,从而使设备整体浮力增加,使得该设备自动上浮,从而避免因电量限制导致的设备无法移动至水面,减少设备回程时的耗电量,方便设备上浮回收,减少设备丢失的风险。
28.整流罩230的环形外侧壁靠近壳件200的一侧固定连通有套管一231,套管一231的一端贯穿壳件200的外侧壁并延伸至壳件200内部,套管一231与壳件200之间转动连接,倾角调节机构400包括电机二410,电机二410的一端与壳件200的另一内侧壁固连,电机二410的输出端固连有转轴420,转轴420的一端外侧壁固定套接有蜗杆430,套管一231的一端外侧壁固定套接有蜗轮440,蜗杆430与蜗轮440啮合,转轴420的一端转动连接有转动座421,转动座421的一端与壳件200环形内侧壁固连,电机二410带动转轴420转动,转轴420通过蜗杆430带动蜗轮440转动,蜗轮440带动套管一231转动,从而调整整流罩230的角度,改变推进桨叶240的推进角度。
29.传动机构300包括套管二320,套管二320与套管一231内壁固定套接,套管二320背离壳件200的一端固定连通有防水罩310,套管二320的另一端转动套接有轴杆三340,轴杆一252的环形外侧壁固定套接有锥齿轮一253,防水罩310的一端内侧壁转动连接有轴杆二330,轴杆二330的一端贯穿防水罩310的另一端并与紧邻位置推进桨叶240固定套接,轴杆二330的一端环形外侧壁固定套接有锥齿轮二331,轴杆三340的环形外侧壁两端均转动连接有锥齿轮三341,且一个锥齿轮三341与锥齿轮一253啮合,另一锥齿轮三341与锥齿轮二331啮合,电机一251带动轴杆一252转动,轴杆一252通过锥齿轮一253带动轴杆三340转动,轴杆三340通过锥齿轮二331带动轴杆二330转动,轴杆二330带动推进桨叶240转动,从而推动主体100前进。
30.主体100的前端两侧位置均安装有垂直推动模块110,通过垂直推动模块110控制主体100的仰俯角度,气管二610的一端外侧壁安装有电控阀门620,通过电控阀门620控制气管二610的连通。
31.充气罐500背离壳件200的一端底侧固定连通有气管一510,气管一510的一端贯穿壳件200并与连通管一220,充气罐500的内壁滑动连接有活塞板530,充气罐500的另一端固定套接有连通管二520,活塞板530的内壁滑动连接有通气管540,通气管540背离连通管二520的一端封闭,通气管540的一端环形外侧壁开设有侧孔541,通气管540的另一端环形外侧壁与活塞板530之间设置有复位弹簧550,复位弹簧550与通气管540滑动连接,气流吹过叶轮254后通过连通管一220和气管一510进入充气罐500内,气体推动活塞板530推进从一端滑动至另一端,将充气罐500内的水体从泄压孔570和连通管二520向外排出,从而辅助推动主体100,至连通管二520与通气管540接触后,活塞板530被气压挤压继续向另一端移动,
通气管540上的侧孔541移动至活塞板530的一侧,使得充气罐500的一端与连通管二520连通,气体从连通管二520向后喷出,从而辅助推动主体100,同时由于充气罐500内的水体被部分排出,从而使设备浮力增加,使得该设备自动上浮。
32.充气罐500的另一端端面开设有泄压孔570,充气罐500的一端连通有手动阀门560,设备完全浮出水面后,关闭电控阀门620,在再次使用时,手动将手动阀门560打开,将设备浸入水中,由于手动阀门560位置高度高于连通管二520和泄压孔570,水流进过连通管二520和泄压孔570进入充气罐500内部,并在水压作用下推动活塞板530朝充气罐500一端移动,将充气罐500一端的气体从手动阀门560排出,使得充气罐500内重新充入水体,方便在次使用,通气管540的另一端内径与连通管二520的外径相同,便于通气管540的一端与连通管二520套接。增加通气管540与连通管二520之间的密封性。
33.工作原理:使用时,通过垂直推动模块110控制主体100的仰俯角度,电机一251带动轴杆一252转动,轴杆一252通过锥齿轮一253带动轴杆三340转动,轴杆三340通过锥齿轮二331带动轴杆二330转动,轴杆二330带动推进桨叶240转动,从而推动主体100前进,电机二410带动转轴420转动,转轴420通过蜗杆430带动蜗轮440转动,蜗轮440带动套管一231转动,从而调整整流罩230的角度,改变推进桨叶240的推进角度,通过控制电机一251的不同转速,使两个推进桨叶240产生不同推力实现转弯,当电量较低时,打开电控阀门620,压缩气罐600内的气体通过气管二610吹动叶轮254,从而通过叶轮254加速轴杆一252转动,从而增加推进桨叶240的转速,增加推进力,气流吹过叶轮254后通过连通管一220和气管一510进入充气罐500内,气体推动活塞板530推进从一端滑动至另一端,将充气罐500内的水体从泄压孔570和连通管二520向外排出,从而辅助推动主体100,至连通管二520与通气管540接触后,活塞板530被气压挤压继续向另一端移动,通气管540上的侧孔541移动至活塞板530的一侧,使得充气罐500的一端与连通管二520连通,气体从连通管二520向后喷出,从而辅助推动主体100,同时由于充气罐500内的水体被部分排出,从而使设备浮力增加,使得该设备自动上浮,从而避免因电量限制导致的设备无法移动至水面,减少设备回程时的耗电量,方便设备上浮回收。
34.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
35.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1