一种全潜式张力腿平台以及基于该类装置的水下采油方法与流程
1.本发明涉及一种张力腿平台,特别是涉及一种全潜式张力腿平台以及基于该类装置的水下采油方法。
背景技术:
2.深海油气开采模式主要分为水上采油模式和水下采油模式。其中,水上采油模式是在海面上进行的,而水下采油模式是在深海海底进行的。水上采油模式需要使用张力腿平台或者spar平台,而这两种海洋平台具有较高的制造难度以及成本支出。所以我国目前主要倾向于使用水下采油模式进行深海油气开采。目前,深水采油树在国内最大作业水深为1480m,但国外深水采油树最大作业水深已达2934m。我国的深水水下采油设备还远远没有满足我国海洋石油勘探开发的目标,还要向水更深的海域进军。
3.用于深海油气田的水下采油设备包括深水管汇中心、深水变压器、深水分离器以及深水采油树等。其中最具有代表性的设备是深水采油树。本说明书以深水采油树为例进行背景技术讨论,其它深水采油设备具有类似的特点。现有技术的深水采油树存在以下几点不足之处:1. 成本高。深水采油树的价格是浅水采油树的价格的两倍。更为重要的是,深水采油树的日常维护成本和维修成本都要远远高于浅水采油树。浅水采油树仅需要潜水员进行维修操作就可以了,而深水采油树只能通过电液控制模式并结合rov操作面板进行维护操作。这大大增加了深水采油树正常运行所需的日常开支;2. 制造难度高。水下采油树拥有异常严格的制造工艺与技术要求,堪称与航空航天工程一样的工业制造技艺顶峰。而深水采油树安装在深海海底,一旦安装便不能人工维修,并且需要稳定运行数十年。这使其制造难度高于浅水采油树,更加需要考虑耐高温高压、耐腐蚀性能;3. 可靠性要求高。由于深水采油树位于深海或超深海的海底,因此只能通过脐带缆和水下机器人进行远程操作。如果深水采油树发生故障,甚至漏油事故的发生,其维修操作很困难。这对于成功解决事故,快速复产等都存在不小的工程障碍。目前中国海油对生产安全抓的非常严,因此对用于深海油气田的水下采油设备来说,能够具有安全可靠的技术性能是受众人青睐和喜欢的。
4.综上所述,水上采油模式中的海洋平台和水下采油模式中的深水采油设备均具有成本高,可靠性差的缺点。因此有必要开发一种安全可靠、成本低的全潜式张力腿平台。外企在用于深海海面和深海海底的采油装备上具有雄厚的技术积累。因此有必要设计一种水下采油方法,能够绕开外企在现有采油模式上的高超技艺。
技术实现要素:
5.请求保护的发明要解决和改进的部分:本发明的目的在于提供一种全潜式张力腿平台以及基于该类装置的水下采油方法,使本发明的张力腿平台所承载的浅水采油设备能够在深海油气田中进行采油作业。
6.为了实现上述目的,在本发明一些实施例中,提供如下技术方案:本发明提供一种全潜式张力腿平台,其包括用于承载水下采油设备的平台主体、
张力腿筋腱以及锚固基础;张力腿筋腱的顶部连接平台主体的边缘,张力腿筋腱的底部连接锚固基础;所述的平台主体包括用于提供浮力的浮箱;所述的浮箱所产生的浮力大于平台主体的总重力。
7.在一些实施例中,本发明的张力腿平台的浮箱呈扁平状;所述的浮箱用于承载水下采油设备;张力腿筋腱连接于浮箱的边缘。
8.在一些实施例中,本发明的张力腿平台的平台主体还包括平台甲板;浮箱位于平台甲板的下方;所述的平台甲板用于承载水下采油设备。
9.在一些实施例中,本发明的张力腿平台的张力腿筋腱连接于平台甲板的边缘。
10.在一些实施例中,本发明的张力腿平台的张力腿筋腱连接于浮箱的边缘。
11.在一些实施例中,本发明的张力腿平台的张力腿筋腱以竖直的形态连接于平台主体和锚固基础之间。
12.在一些实施例中,本发明的张力腿平台的张力腿筋腱以倾斜的形态连接于平台主体和锚固基础之间;各个张力腿筋腱之间的距离随着水深的增大而增加。
13.在一些实施例中,本发明的张力腿平台的浮箱还包括具有加强浮箱抗屈曲能力的功能的加强筋;所述的加强筋位于浮箱的内部。
14.在一些实施例中,本发明的张力腿平台的浮箱还包括分仓壁;所述的分仓壁位于浮箱内部,用于将浮箱划分成独立密封舱室。
15.本发明还提供一种基于全潜式张力腿平台的水下采油方法,其步骤如下:步骤一:参考图1,将具有全潜浮功能的张力腿平台安装在水面以下,使平台主体位于浅水水层中。所述的浅水水层的深度范围是30m-100m;步骤二:顶部张紧式立管的底端密封连接位于海底的井口;平台主体上的张紧器安装在顶部张紧式立管的顶部;步骤三:浅水采油树底端密封连接于顶部张紧式立管的顶端;步骤四:浅水采油树与水下管汇中心通过跨接管进行密封连接;浅水采油树通过所述的跨接管将井液输送给水下管汇中心;步骤五:所述的水下管汇中心完成井液计量和增压,然后通过油气管道将井液输送给生产系统进行油气处理和储运。
16.在一些实施例中,所述的生产系统是浮式生产储油船(fpso)。
17.在一些实施例中,所述的生产系统是半潜式海洋平台。
18.在一些实施例中,所述的生产系统是位于陆地上的油气处理工厂。
19.在一些实施例中,本发明的全潜式张力腿平台的平台主体上安装有其它类型的水下采油设备,例如水下管汇中心、水下油水分离器以及水下变压器等。
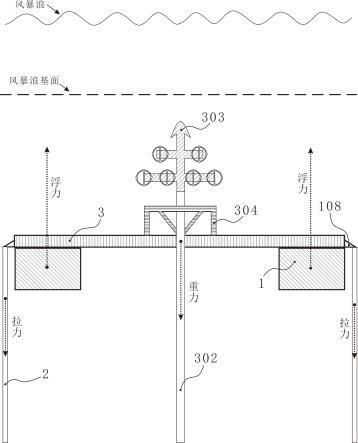
20.较现有技术相比,本发明技术方案的有益效果在于:(1)较低的成本支出。参考图1,本发明的张力腿平台的浮箱所产生的浮力大于张力腿平台及其上面安装的水下采油设备的总重力。所述的浮箱的剩余浮力与张力腿筋腱的预张力大小相等、方向相反。基于上述受力分析可知,本发明的张力腿平台能够实现力系平衡,从而能够稳定地潜浮于海水中。本发明的张力腿平台的平台主体以全潜浮的方式位于深海海域的浅水层中。因此张力腿平台上的水下采油设备仅需适应浅水环境即可,不需要考虑如何适应深海海底所特有的极端环境。例如在本发明的张力腿平台上可以安装浅水采
油树、浅水脐带缆以及浅水水下管汇中心进行深海油气勘探。浅水采油树的制造成本是深水采油树的一半,所需使用的脐带缆的长度也很短,这都降低了生产成本。而且用于浅水环境的水下采油设备仅需要通过潜水员进行日常维护即可,这就避免了深水采油树及其它用于深水环境的水下采油设备的制造成本以及日常维护费用过高的问题;(2)较高的可靠性。参考图1,本发明的张力腿平台安装在风暴浪基面的下方。风暴浪基面的水深大约为30m-50m。因此基于本发明的全潜式张力腿平台的水下采油方法既不属于现有技术的海面采油模式也不属于海底采油模式,而是一种用于深海油气田的水下浅水采油模式。发明人将其命名为“风暴采油模式”。本发明的张力腿平台几乎永远不受风暴浪的影响,因此不需要考虑海面浮体所要考虑的六个自由度以及张力腿筋腱断裂所产生的倾覆风险。同时本发明的张力腿平台通过浅水水下采油设备来开采深海油气田,这就避免了深水水下采油设备维护困难的问题,从而加强了水下采油设备的可靠运行;(3)较低的制造难度。参考图1,基于第一个和第二个有益效果可知,本发明的张力腿平台及其承载的水下采油设备具有成本低和可靠性高的优点。这就意味着对这些水下采油设备的质量要求并不苛刻,从而起到降低制造难度的目的。由于本发明的张力腿平台全潜浮于水面以下,几乎不受极端风浪的影响,这就大大降低了浮箱的剩余浮力与张力腿筋腱的预张力的要求,因此就降低的张力腿筋腱的使用数量和质量要求。在一些实施例中,本发明的张力腿平台可采用国产的聚酯缆绳作为张力腿筋腱。本发明的张力腿平台可以实现用浅水采油树来代替深水采油树进行深海油气开采,这就降低了水下采油树的制造难度。目前最先进的脐带缆的最大使用水深不到2500m。本发明的张力腿平台通过将采油树安装在浅水水层,极大地降低的脐带缆的使用水深,更有利于制造难度较低的国产脐带缆的使用。本发明的张力腿平台也可以使用浅水水下管汇中心、浅水油水分离器和浅水变压器来进行深海油气处理作业。这些用于浅水的水下采油设备的制造难度相对更低。
附图说明
21.在附图中示出了对应于本发明说明书中实施例的各种结构示意图。这些图并非是按比例绘制的。为了实现清楚表达,附图放大了某些结构特征的细节,并且可能省略了某些结构特征的细节。图中所示出的各种零件的形状及它们之间的相对大小、位置关系仅是示例性的。本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的零件。在附图中:图1是本发明的部分实施例中的张力腿平台的受力分析示意图;图2是第一个实施例中的张力腿平台的立体图;图3是经过图2中的a、b两点的张力腿平台的垂向剖视图;图4是第一个实施例中的张力腿平台的几个主要部件的立体图;图5是第一个实施例中的浮箱的俯视角度的剖视图;图6是第一个实施例中的浮箱的侧视角度的剖视图;图7是位于浮箱壁内表面的周向筋板与垂向筋板的连接方式的示意立体图;图8是在浮箱壁拐角处的垂向筋板、径向筋板以及肘板的连接方式的示意立体图;图9是浮箱桁架的结构示意立体图;图10是第二个实施例中的张力腿平台的立体图;
图11是经过图10中的a、b两点的张力腿平台的垂向剖视图;图12是第二个实施例中的浮箱的俯视角度的剖视图;图13是第二个实施例中的浮箱的侧视角度的剖视图;图14是第三个实施例中的张力腿平台的立体图;图15是经过图14中的a、b两点的张力腿平台的垂向剖视图;图16是第三个实施例中的张力腿平台的几个主要部件的立体图。
22.本发明的张力腿平台的附图标记:浮箱1、浮箱壁101、周向筋板102、径向筋板103、垂向筋板104、肘板105、浮箱桁架106、分仓壁107、张力腿连接器108、中心浮箱109、边缘浮箱110、张力腿筋腱2、平台甲板3、立管孔301、顶部张紧式立管302、浅水采油树303以及张紧器304。
具体实施方式
23.以下具体描述涉及附图,这些附图展示了可以实施本发明的实施例。需要注意的是,本发明所描述的各个实施例未必互斥,因此不同实施例的技术特征可以组合以形成新的实施例。本发明的功能及结构原理已在实施例中展示和说明。在没有背离所述原理的情况下,本发明的实施方式可以有任何变形或修改。在不同实施例的技术特征组合在一起不产生矛盾的情况下,本文进行了从属权利要求的申请。在独立权利要求中所描述的各个零件的方位特征是参照摘要附图来定义的。
24.在实施例的具体描述中,根据所参考的附图中各个零件的方位特征使用了诸如“顶端”、“底端”、“两端”、“底部”、“顶部”、“下方”以及“上方”等等词语。不同零件的方位特征的描述被用于说明实施例而决不是进行技术特征的限制。“顶端”、“底端”和“两端”是用于描述物体边缘的方位特征。“顶部”是指靠近所描述的物体的顶端边缘的区域部分。“底部”是指靠近所描述的物体的底端边缘的区域部分。“下方”和“上方”是用于描述一个物体处于另一个物体的体积范围之外的方位特征。也就是说被比较方位特征的两个物体应被视为两个物体来看待,没有包含关系。
25.本发明的描述中,除非另有明确的限定,“设置”、“安装”、“连接”等词语应做广义理解。所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
26.本发明的一种全潜式张力腿平台,在本说明书中可简称为“本发明的张力腿平台。
27.术语“浮箱的内侧壁”是指靠近本发明的张力腿平台的轴心的一侧的浮箱壁。
28.术语“浮箱的外侧壁”是指远离本发明的张力腿平台的轴心的一侧的浮箱壁。
29.术语“浮箱的顶壁”是指浮箱顶端的浮箱壁。
30.术语“浮箱的底壁”是指浮箱底端的浮箱壁。
31.术语“潜浮”是指物体位于水面以下,但漂浮在水中。
32.术语“周向筋板”是指在水平面内,沿本发明的张力腿平台的轴心的圆周方向分布的加强筋。
33.术语“垂向筋板”是指在沿垂向分布的加强筋。
34.术语“径向筋板”是指在在水平面内,沿本发明的张力腿平台的轴心的径向分布的加强筋。
35.术语“平台主体”是指本发明的张力腿平台的浮箱,或者是指本发明的张力腿平台的浮箱与平台甲板的组合。
36.术语“水下采油设备”泛指一种或多种用于水下油气开采的装置。用于水下油气开采的装置包括浅水采油树、水下油水分离器、水下油气管汇中心、水下变压器、顶部张紧式立管以及张紧器等。
37.术语“平台主体的总重力”是指平台主体及其上面搭载的水下采油设备的总重力。
38.术语“浅水水下采油设备”是指用于浅水环境的水下采油设备。
39.术语“深水水下采油设备”是指用于深水环境的水下采油设备。
40.参考图1至图8可用于说明本发明的张力腿平台的第一个实施例,该张力腿平台包括有平台主体、张力腿筋腱2、张力腿连接器108以及锚固基础。其中平台主体包括浮箱1以及平台甲板3;浮箱1包括有浮箱壁101以及加强筋;加强筋包括周向筋板102、径向筋板103、垂向筋板104以及肘板105。
41.参考图4和图5,浮箱1呈环状,位于平台甲板3的边缘区域的下方。张力腿连接器108相对于浮箱1的形心呈对称状分布。
42.参考图4、图3和图2,浮箱1的顶端通过焊接的方式固定连接于平台甲板3的底端。张力腿连接器108通过焊接的方式固定连接于浮箱1的边缘。
43.参考图2和图1,张力腿筋腱2的顶部连接于张力腿连接器108。张力腿筋腱2的底部与位于海底的锚固基础进行连接(图中未示出)。张力腿筋腱2以竖直的形态连接于平台主体和锚固基础之间。张力腿筋腱2是由抗腐蚀的钢丝绳制成的。关于张力腿筋腱2、张力腿连接器108以及锚固基础均采用现有技术。为了做到清楚简洁,本发明说明书不再赘述这方面内容。
44.参考图2,平台甲板3的中心区域含有立管孔301。如此设置是为了使顶部张紧式立管302能够穿过立管孔301,然后与平台甲板3上的张紧器304进行连接。所述的张紧器304可参考发表的期刊《振动与冲击》上的文章《顶张式立管液压气动式张紧器的数值模拟》。
45.本实施例的张力腿平台以全潜浮的形式安装于水面以下,其中平台主体位于水深50m的位置。浮箱1的浮力大于平台主体的总重力。浮箱1的剩余浮力与张力腿筋腱2的预张力大小相等、方向相反,从而实现本发明的张力腿平台的力系平衡。
46.参考图5和图6,浮箱壁101的浮箱内侧壁和浮箱外侧壁的内表面安装有周向筋板102和垂向筋板104,浮箱顶壁和浮箱底壁的内表面安装有径向筋板103。周向筋板102、径向筋板103以及垂向筋板104均通过焊接的方式固定在浮箱壁101的内表面上。浮箱1的钢材选用可参考专利申请号为201610069890.0的一种海洋钻井平台舱底水系统用合金材料及其制备方法。
47.参考图7,垂向筋板104垂直穿过周向筋板102并与其焊接在一起。周向筋板102的型材类型是t字钢。垂向筋板104和径向筋板103的型材类型是折边钢。
48.参考图8和图6,肘板105位于浮箱1的边角处,肘板105呈三角形板状。肘板105的一边连接径向筋板103,肘板105的另一边连接垂向筋板104。如此设置是为了增加垂向筋板104与径向筋板103连接点的强度。
49.参考图7至图13可用于说明本发明的张力腿平台的第二个实施例,该张力腿平台包括有平台主体、张力腿筋腱2、张力腿连接器108以及锚固基础。其中平台主体包括浮箱1;
浮箱1包括有浮箱壁101、分仓壁107以及加强筋;加强筋包括周向筋板102、径向筋板103、垂向筋板104、肘板105以及浮箱桁架106。
50.参考图10和图12,浮箱1呈扁平状。如此设置是为了使水下采油设备能够安装在浮箱1上。张力腿连接器108相对于浮箱1的形心呈对称状分布,并通过焊接的方式固定连接于浮箱1的边缘。
51.参考图10,张力腿筋腱2的顶部连接于张力腿连接器108。张力腿筋腱2的底部与位于海底的锚固基础进行连接(图中未示出)。张力腿筋腱2以竖直的形态连接于平台主体和锚固基础之间。张力腿筋腱2是由一种抗腐蚀的空心钢管制成的(参考发表在期刊《海洋工程装备与技术》上的文章《张力腿平台筋腱安装与临时浮筒设计》)。关于张力腿筋腱2、张力腿连接器108以及锚固基础均采用现有技术。为了做到清楚简洁,本发明说明书不再赘述这方面内容。
52.参考图10,浮箱1的中心区域含有立管孔301。如此设置是为了使顶部张紧式立管302能够穿过立管孔301,然后与浮箱1上的张紧器304进行连接(参考图1)。所述的张紧器304可参考发表的期刊《振动与冲击》上的文章《顶张式立管液压气动式张紧器的数值模拟》。
53.本实施例的张力腿平台以全潜浮的形式安装于水面以下,其中平台主体位于水深30m的位置。浮箱1的浮力大于平台主体的总重力。浮箱1的剩余浮力与张力腿筋腱2的预张力大小相等、方向相反,从而实现本发明的张力腿平台的力系平衡。
54.参考图13和图12,浮箱壁101的浮箱内侧壁和浮箱外侧壁的内表面安装有周向筋板102和垂向筋板104,浮箱顶壁和浮箱底壁的内表面安装有径向筋板103。周向筋板102、径向筋板103以及垂向筋板104均通过焊接的方式固定在浮箱壁101的内表面上。浮箱1的钢材选用可参考专利申请号为201610069890.0的一种海洋钻井平台舱底水系统用合金材料及其制备方法。
55.参考图7,垂向筋板104垂直穿过周向筋板102并与其焊接在一起。周向筋板102的型材类型是工字钢;垂向筋板104和径向筋板103的型材类型是槽钢。
56.参考图13和图8,肘板105位于浮箱1的边角处,肘板105呈三角形板状。肘板105的一边连接径向筋板103,肘板105的另一边连接垂向筋板104。如此设置是为了增加垂向筋板104与径向筋板103连接点的强度。
57.参考图12、图13和图9,浮箱桁架106呈环状,位于浮箱1内部。浮箱桁架106的顶端通过焊接的方式连接浮箱顶壁,浮箱桁架106的底端通过焊接的方式连接浮箱底壁。如此设置是为了增加浮箱1的抗屈曲能力。
58.参考图14至图16可用于说明本发明的张力腿平台的第三个实施例,该张力腿平台包括有平台主体、张力腿筋腱2、张力腿连接器108以及锚固基础。其中平台主体包括浮箱1、平台甲板3;浮箱1包括中心浮箱109以及边缘浮箱110。
59.参考图16和图15,边缘浮箱110位于平台甲板3的边缘区域的下方,而中心浮箱109位于平台甲板3的中心区域的下方。中心浮箱109呈环状,所述的中心浮箱109的中心处的孔洞与平台甲板的立管孔301相对应。如此设置是为了使顶部张紧式立管302能够穿过中心浮箱109的中心区域和立管孔301,然后与平台甲板3上的张紧器304进行连接(参考图1)。所述的张紧器304可参考发表的期刊《振动与冲击》上的文章《顶张式立管液压气动式张紧器的
数值模拟》。
60.参考图15和图14,浮箱1的顶端通过焊接的方式固定连接于平台甲板3的底端。张力腿连接器108相对于平台甲板3的形心呈对称状分布。所述的张力腿连接器108通过焊接的方式固定连接于平台甲板3的边缘。
61.参考图14,张力腿筋腱2的顶部连接于张力腿连接器108。张力腿筋腱2的底部与位于海底的锚固基础进行连接(图中未示出)。张力腿筋腱2以倾斜的形态连接于平台主体和锚固基础之间。各个张力腿筋腱2之间的距离随着水深的增大而增加。所述的张力腿筋腱2是由聚酯缆绳制成的。关于张力腿筋腱2、张力腿连接器108以及锚固基础均采用现有技术。为了做到清楚简洁,本发明说明书不再赘述这方面内容。
62.本实施例的张力腿平台以全潜浮的形式安装于水面以下,其中平台主体位于水深100m的位置。浮箱1的浮力大于平台主体的总重力。浮箱1的剩余浮力与张力腿筋腱2的预张力的合力的方向大小相等、方向相反,从而实现本发明的张力腿平台的力系平衡。
63.中心浮箱109和边缘浮箱110的浮箱壁101是使用5cm厚的钛合金板材制成的,如此设置是为了增强浮箱1的抗屈曲能力。
64.本发明的全潜式张力腿平台的安装方法,其步骤如下:步骤一:将锚固基础固定安装在海底。张力腿筋腱2的底部连接锚固基础,张力腿筋腱2的顶部连接临时浮筒;步骤二:在平台主体的浮箱1中注入压载水,同时大型起重船吊装平台主体,使所述的平台主体缓慢平稳地下沉到水面以下并到达预装位置;步骤三:张力腿筋腱2与平台主体的张力腿连接器108进行连接,然后所述张力腿筋腱2卸掉临时浮筒;步骤四:排出浮箱1中的一部分压载水,使所述的浮箱1所产生的浮力大于平台主体的重力。浮箱1的剩余浮力与张力腿筋腱2的预张力保持平衡,从而使平台主体稳定地潜浮于海水中;步骤五:将水下采油设备安装在平台主体的上方。在安装所述的水下采油设备时,浮箱1中的压载水进一步被排出,始终保持浮箱1产生的浮力大于平台主体及其上面安装的水下采油设备的总重力。
65.本发明说明书提到的临时浮筒可参考专利申请号为201720183142.5的张力腿平台筋腱的临时浮力装置。张力腿筋腱的安装方法可参考专利申请号为201811086011.0的张力腿平台张力腿筋腱分段组对接长的方法。
66.本发明说明书提到的张力腿筋腱2,张力腿筋腱连接器108以及锚固基础的制造方法和安装方法全部采用现有技术。
67.参考图1,本发明的一种基于全潜式张力腿平台的水下采油方法,其步骤如下:步骤一:将具有全潜浮功能的张力腿平台安装在水面以下,使平台主体位于浅水水层中。所述的浅水水层的深度范围是30m-100m;步骤二:顶部张紧式立管的302底端密封连接位于海底的井口;平台主体上的张紧器304安装在顶部张紧式立管302的顶部;步骤三:浅水采油树303底端密封连接于顶部张紧式立管302的顶端;步骤四:浅水采油树303与水下管汇中心通过跨接管进行密封连接。浅水采油树
303通过所述的跨接管将井液输送给水下管汇中心(图中未示出);步骤五:所述的水下管汇中心完成井液计量和增压,然后通过油气管道将井液输送给生产系统进行油气处理和储运(图中未示出)。
68.在一些实施例中,所述的生产系统是浮式生产储油船(fpso)。
69.在一些实施例中,所述的生产系统是半潜式海洋平台。
70.在一些实施例中,所述的生产系统是位于陆地上的油气处理工厂。
71.在一些实施例中,本发明的全潜式张力腿平台的平台主体上安装有其它类型的水下采油设备,例如水下管汇中心、水下油水分离器以及水下变压器等。
72.本发明说明书中所述的顶部张紧式立管302以及张紧器304全部采用现有技术。
73.本发明的一种水下采油方法所提及的水下采油设备全部采用现有技术。为了做到清楚、简洁,本发明说明书不再进行赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1