一种仿青蛙水下机器人的制作方法
1.本发明涉及机器人技术领域,具体涉及一种仿青蛙水下机器人。
背景技术:
2.近年来为了更好地适应不同水下环境和任务要求,仿水生生物的推进技术研究受到众多学者的关注,不同运动形式的水下仿生推进技术的相继研究,对不断丰富并完善水下推进技术、拓宽水下机器人应用范围具有非常重要的研究意义和实用价值。目前,有多种模仿海洋生物的水下机器人被研制出来,然而大多数水下机器人仍然依靠船舶等使用的螺旋桨推进方式,传统的螺旋桨推进方式推进噪声大、隐蔽性不强,同时适应环境的能力较差。而自然界中许多生物经历多年的进化和自然界的淘汰,其运动机理在推进方式,推进效率方面,有人类所设计的机械结构无法比拟的优势。因此,以生物为原型的仿生机器人便如雨后春笋般出现。面对人类无法轻易到达或较危险的地方,如果能有一种机器人可以应对复杂的外界环境的同时能够作为探测设备,操作设备,通讯设备以及武器系统的载体,则可在军事侦察、能源探索、反恐救灾、科学研究、气象探测等领域能起到重要作用。
3.水中的生物经过千百年的进化,具有各种各样的游动机理和推进方式,受此启发所形成的水下推进方式也数不胜数。青蛙躯干扁平,头部略尖,这样的体型有利于减少游动过程中的水下阻力,实现破水前进。与前肢相比,青蛙后肢长度占整体的比例很大,且后肢大而强健,趾间有蹼,从而可以增大排水面积,实现快速游动。青蛙在水中借助其带蹼的脚掌和后肢的推进机制,通过腿部的往复伸展运动,能自由的在水面和水底游动。同时青蛙的游动采用双肢协同的运动方式,克服了鱼尾摆动过程中的侧向力和重浮心偏移问题,使生物体运行更加平稳,同时生物青蛙可以在较短的时间内达到较高的运动速度,便于躲避水下环境潜在的危险。现有的仿青蛙跳跃机构以气动肌肉为驱动器,每个关节由一个气动肌肉和一个复位弹簧驱动,可完成青蛙的仿生蹬腿、收腿等动作。但只能在水面漂浮的状态下进行游动,无法进行下潜与上浮等复杂动作。
4.仿生青蛙划动推进是一种运动方式独特且具有广阔应用前景的水下推进方式。如果能借鉴生物青蛙灵巧的生物结构,基于其游动机理来模拟其高效的水下运动方式,便能弥补传统水下机器人体积重量大、灵活性差的不足,从而创造出具有较强环境适应性的仿生水下机器人。
技术实现要素:
5.为解决现有技术的不足,本发明的目的在于提供一种仿青蛙水下机器人,能够依靠青蛙的生物学原理实现在水中的游动,并能实现转向、上浮、下潜等动作,具有较强的仿生性和隐蔽性。
6.本发明采取的技术方案为:一种仿青蛙水下机器人,其特征在于:机架内部前端设置有控制单元,控制单元内部集成有智能控制系统和通信模块,智能控制系统可根据水下机器人所处的环境和控制人员的指令控制水下机器人的游动,通信模块可实现水下机器人
与控制人员之间的人机交互,机架中间位置设有电池组,机架上侧安装有太阳能电池板,太阳能电池板可将光照转化为电能并为电池组充电,摄像头安装于机架前端下侧,机架内部前端还设有一个电机安装板;左前肢和右前肢分别安装于机架前端的左右两侧并可上下摆动和定位,转轴横向安装于机架前端内部并可自由转动,转轴的两端分别与左前肢和右前肢紧固连接,转轴中间位置设有传动柱,传动柱的右端周向均布设有八个传动球,前肢电机固定安装于电机安装板上,拨轮上周向均布设有多个拨齿,拨轮与前肢电机的输出轴同轴紧固连接,并且拨轮上的拨齿可与传动球进行啮合传动;左后肢中的左前大腿杆、左膝盖、左后大腿杆、机架构成四连杆结构,左前小腿杆、左膝盖、左后小腿杆、左踝关节构成四连杆结构,左电缸安装于机架与左前大腿杆之间,左滑块与左后大腿杆构成移动副,左内连杆安装于机架与左滑块之间,左外连杆安装于左前小腿杆与左滑块之间,左脚掌横向安装于左踝关节上并可在0~70
°
的范围内自由摆动,从而左电缸伸长可使左脚掌向后划水;右后肢中的右前大腿杆、右膝盖、右后大腿杆、机架构成四连杆结构,右前小腿杆、右膝盖、右后小腿杆、右踝关节构成四连杆结构,右电缸安装于机架与右前大腿杆之间,右滑块与右后大腿杆构成移动副,右内连杆安装于机架与右滑块之间,右外连杆安装于右前小腿杆与右滑块之间,右脚掌横向安装于右踝关节上并可在0~70
°
的范围内自由摆动,从而右电缸伸长可使右脚掌向后划水。
7.作为优选,摄像头中的镜头可上下摆动和周向旋转,以增大视野范围。摄像头可将拍摄到的图像信息通过通信模块传输给操控人员,便于操控人员分析对情报进行分析,也便于操控人员控制水下机器人的游动。
8.作为优选,左前肢和右前肢的前端均设有向上弯曲的弧面,在水下机器人向前游动时,水流从两个前肢下侧流过,有利于提升水下机器人在游动时的升力。
9.作为优选,传动柱的左端设有一个回转槽,前肢电机的输出轴与回转槽接触,可在一定程度上减少转轴的挠曲变形。
10.作为优选,左后大腿杆和右后大腿杆后侧均设有一个导轨,左滑块和右滑块分别安装于对应导轨上并构成移动副。
11.作为优选,左脚掌和右脚掌前侧为外凸圆柱弧面,当脚掌向前移动时,有利于水流从其前侧流过并使脚掌顺时针摆动,减少水流阻力;左脚掌和右脚掌的后侧为内凹圆柱面,当脚掌向后移动并推水时,在水的反作用力下,脚掌逆时针摆动,此时可使水流向两侧流动,避免水流朝四周流动形成紊流,提高稳定性的同时可利用推水的反作用力实现水下机器人向前的游动。
12.本发明的有益效果:
13.(1)水下机器人的外形和游动姿态具有较强的青蛙仿生特性,较强的隐蔽性可使水下机器人不会被轻易发现,有利于完成军事侦查等特种任务,另外水下机器人不仅可以左右转向还可以上浮和下潜,在水中具有较高的游动效率和灵活性。
14.(2)水下机器人上侧设有太阳能电池板,太阳能电池板可将光照转化为电能并为电池组充电,从而可有效增加水下机器人的续航能力。
15.(3)前肢电机可通过拨轮与传动球的啮合实现左前肢和右前肢的上下摆动和定位,传动球的外端为硬质光滑球面,从而拨轮与传动球的啮合为多点接触,从而可避免水中泥土或水草等杂质卡住拨轮与传动球的啮合,使两个前肢的摆动可定位具有较高的可靠
性。
16.(4)左脚掌和右脚掌前侧为外凸圆柱弧面,当脚掌向前移动时,有利于水流从其前侧流过并使脚掌顺时针摆动,减少水流阻力;左脚掌和右脚掌的后侧为内凹圆柱面,当脚掌向后移动并推水时,在水的反作用力下,脚掌逆时针摆动,此时可使水流向两侧流动,避免水流朝四周流动形成紊流,提高稳定性的同时可利用推水的反作用力实现水下机器人向前的游动。
附图说明
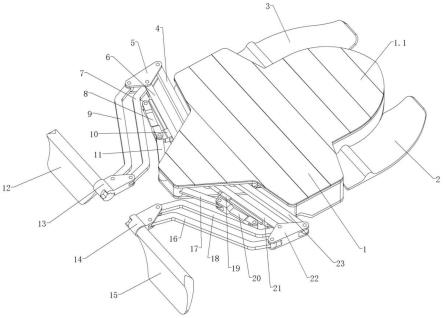
17.图1为本发明右上视向的整体结构示意图。
18.图2为本发明右下视向的整体结构示意图。
19.图3为本发明俯视剖面结构示意图。
20.图4为拨轮位置的局部剖面放大示意图。
21.图5为左脚掌位置的局部放大示意图。
22.图6为本发明向前游动时的一个状态示意图。
23.图7为本发明向上浮动时的一个状态示意图。
24.附图标号:1机架、1.1太阳能电池板、1.2电机安装板、2右前肢、3左前肢、4左前大腿杆、4.1第一连接耳、5左膝盖、6左后大腿杆、6.1左导轨、7左前小腿杆、7.1第二连接耳、8左外连杆、9左后小腿杆、10左滑块、11左内连杆、12左脚掌、12.1第一定位面、12.2第二定位面、13左踝关节、13.1第三定位面、13.2第四定位面、14右踝关节、15右脚掌、16右后小腿杆、17右内连杆、18右前小腿杆、18.1第四连接耳、19右滑块、20右外连杆、21右后大腿杆、21.1右导轨、22右膝盖、23右前大腿杆、23.1第三连接耳、24摄像头、25左电缸、26前肢电机、27拨轮、28控制单元、29转轴、29.1传动柱、29.2传动球、29.3回转槽、30电池组、31右电缸。
具体实施方式
25.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
26.如图1~7所示,一种仿青蛙水下机器人,主要包括机架1、右前肢2、左前肢3、左后肢、右后肢、摄像头24、前肢电机26、拨轮27、控制单元28、转轴29、电池组30,其中机架1为水下机器人的主体结构,机架1内部前端设置有控制单元28,控制单元28内部集成有智能控制系统和通信模块,智能控制系统可根据水下机器人所处的环境和控制人员的指令控制水下机器人的游动,通信模块可实现水下机器人与控制人员之间的人机交互,机架1中间位置设有电池组30,电池组30可进行充电并可为水下机器人提供电能,机架1上侧安装有太阳能电池板1.1,太阳能电池板1.1可将光照转化为电能并为电池组30充电,从而增加水下机器人的续航能力;摄像头24安装于机架1前端下侧,摄像头24中的镜头可上下摆动和周向旋转,以增大视野范围;机架1内部前端还设有一个电机安装板1.2。
27.如图2、图3所示,所述的左前肢3安装于机架1前端左侧并可上下摆动,左前肢3的前端设有向上弯曲的弧面,在水下机器人向前游动时,使水流从左前肢3下侧流过,有利于提升水下机器人在游动时的升力,左前肢3的右侧面为与机架1相贴合的弧线,有利于增大左前肢3的面积;所述的右前肢2安装于机架1前端右侧并可上下摆动,右前肢2的前端设有
向上弯曲的弧面,在水下机器人向前游动时,使水流从右前肢2下侧流过,有利于提升水下机器人在游动时的升力,右前肢2的左侧面为与机架1相贴合的弧线,有利于增大右前肢2的面积;所述的转轴29横向安装于机架1前端内部并可自由转动,转轴29的左端与左前肢3的后端紧固连接,转轴29的右端与右前肢2的后端紧固连接,从而可通过转轴29的转动实现左前肢3和右前肢2的上下摆动和定位。
28.如图3、图4所示,所述的转轴29中间位置设有传动柱29.1,传动柱29.1的左端设有一个回转槽29.3,传动柱29.1的右端周向均布设有八个传动球29.2,每个传动球的外端均为一个硬质光滑球面,每个光滑球面均通过一个硬质杆与传动柱29.1连接;所述的前肢电机26为防水结构并且其内部集成有刹车结构和编码器,刹车结构可实现前肢电机26的断电锁止,实现电机输出轴的锁止定位,编码器可记录电机输出轴的转动角度,前肢电机26通过螺钉固定安装于电机安装板1.2上;所述的拨轮27上周向均布设有多个拨齿,拨轮27与前肢电机26的输出轴同轴紧固连接,并且拨轮27上的拨齿可与传动球29.2进行啮合传动,同时前肢电机26输出轴的前端位于回转槽29.3中,从而前肢电机26可通过转轴29实现左前肢3和右前肢2的上下摆动和定位;前肢电机26的输出轴与回转槽29.3接触,可在一定程度上减少转轴29的挠曲变形。
29.如图3所示,水下机器人左侧后端安装有左后肢,左后肢包括左前大腿杆4、左膝盖5、左后大腿杆6、左前小腿杆7、左外连杆8、左后小腿杆9、左滑块10、左内连杆11、左脚掌12、左踝关节13、左电缸25,其中左前大腿杆4的右端前侧设有第一连接耳4.1,左前大腿杆4的右端与机架1后端左侧转动连接;所述的左电缸25具有防水结构,并且左电缸25内部集成有编码器,编码器可检测左电缸25的伸长量,左电缸25的前端与机架1内部左侧转动连接,左电缸25的后端与第一连接耳4.1转动连接;所述的左膝盖5为三角形结构,左前大腿杆4的左端与左膝盖5的前端转动连接;所述的左后大腿杆6后侧设有左导轨6.1,左后大腿杆6的右端与机架1后端左侧转动连接,左后大腿杆6的左端与左膝盖5右端转动连接,从而左前大腿杆4、左膝盖5、左后大腿杆6、机架1构成四连杆结构;所述左前小腿杆7为折弯的曲杆结构,左前小腿杆7的前端前侧设有第二连接耳7.1,并且左前小腿杆7的前端与左膝盖5右端转动连接,左前小腿杆7的后端与左踝关节13转动连接;所述的左后小腿杆9为与左前小腿杆7相同的曲杆结构,左后小腿杆9前端与左膝盖5后端转动连接,左后小腿杆9后端与左踝关节13转动连接,从而左前小腿杆7、左膝盖5、左后小腿杆9、左踝关节13构成四连杆结构;所述的左滑块10安装于左导轨6.1上并构成移动副;所述左外连杆8的左端与第二连接耳7.1转动连接,左外连杆8的右端与左滑块10转动连接;所述的左内连杆11的左端与左滑块10转动连接,左内连杆11的右端与机架1后端左侧转动连接。
30.从而左电缸25伸长时可使左前大腿杆4逆时针摆动,从而使左膝盖5向后移动,左膝盖5带动左后大腿杆6逆时针摆动,从而在左内连杆11的推动作用下左滑块10在左导轨6.1上向左移动,从而左外连杆8推动左前小腿杆7相对于左膝盖5顺时针转动,最终实现的效果便是左踝关节13向后移动;当左电缸25收缩时,左踝关节13可向前移动。
31.如图5、图6所示,所述的左踝关节13后端横向设有一个光滑圆孔,光滑圆孔的右端设有第三定位面13.1和第四定位面13.2,并且第三定位面13.1和第四定位面13.2的夹角为110
°
;左脚掌12上侧右端设有圆轴,圆轴安装于左踝关节13后端的光滑圆孔中并可自由转动,上述圆轴的右端还设有第一定位面12.1和第二定位面12.2,并且第一定位面12.1和第
二定位面12.2位于同一个平面上,从而左脚掌12可在0~70
°
的范围内摆动;左脚掌12前侧为外凸圆柱弧面,当左脚掌12向前移动时,有利于水流从其前侧流过并使左脚掌12顺时针摆动至70
°
位置,使第一定位面12.1与第三定位面13.1接触,此时可减少水流阻力;左脚掌12的后侧为内凹圆柱面,当左脚掌12向后移动并推水时,在水的反作用力下,左脚掌12逆时针摆动至0
°
位置,使第二定位面12.2与第四定位面13.2接触,此时可使水流向两侧流动,避免水流朝四周流动形成紊流,提高稳定性的同时可利用推水的反作用力实现水下机器人向前的游动。
32.如图3所示,水下机器人右侧后端安装有右后肢,右后肢包括右踝关节14、右脚掌15、右后小腿杆16、右内连杆17、右前小腿杆18、右滑块19、右外连杆20、右后大腿杆21、右膝盖22、右前大腿杆23、右电缸31,其中右前大腿杆23的左端前侧设有第三连接耳23.1,右前大腿杆23的左端与机架1后端右侧转动连接;所述的右电缸31具有防水结构,并且右电缸31内部集成有编码器,编码器可检测右电缸31的伸长量,右电缸31的前端与机架1内部右侧转动连接,右电缸31的后端与第三连接耳23.1转动连接;所述的右膝盖22为三角形结构,右前大腿杆23的右端与右膝盖22的前端转动连接;所述的右后大腿杆21后侧设有右导轨21.1,右后大腿杆21的左端与机架1后端右侧转动连接,右后大腿杆21的右端与右膝盖22左端转动连接,从而右前大腿杆23、右膝盖22、右后大腿杆21、机架1构成四连杆结构;所述右前小腿杆18为折弯的曲杆结构,右前小腿杆18的前端前侧设有第四连接耳18.1,并且右前小腿杆18的右端与右膝盖22左端转动连接,右前小腿杆18的后端与右踝关节14转动连接;所述的右后小腿杆16为与右前小腿杆18相同的曲杆结构,右后小腿杆16前端与右膝盖22后端转动连接,右后小腿杆16后端与右踝关节14转动连接,从而右前小腿杆18、右膝盖22、右后小腿杆16、右踝关节14构成四连杆结构;所述的右滑块19安装于右导轨21.1上并构成移动副;所述右外连杆20的右端与第四连接耳18.1转动连接,右外连杆20的左端与右滑块19转动连接;所述的右内连杆17的右端与右滑块19转动连接,右内连杆17的左端与机架1后端右侧转动连接。
33.从而右电缸31伸长时可使右前大腿杆23顺时针摆动,从而使右膝盖22向后移动,右膝盖22带动右后大腿杆21顺时针摆动,从而在右内连杆17的推动作用下右滑块19在右导轨21.1上向右移动,从而右外连杆20推动右前小腿杆18相对于右膝盖22逆时针转动,最终实现的效果便是右踝关节14向后移动;当右电缸31收缩时,右踝关节14可向前移动。
34.所述右踝关节14的结构与左踝关节13成左右镜像对称,右脚掌15的结构与左脚掌12成左右镜像对称,右脚掌15与左踝关节13的安装及限位原理和左脚掌12与左踝关节13的安装及限位原理相同;当右脚掌15向前移动时,水流从其前侧流过并使右脚掌15顺时针摆动至70
°
位置,此时可减少水流阻力;当右脚掌15向后移动并推水时,在水的反作用力下,右脚掌15逆时针摆动至0
°
位置,此时可使水流向两侧流动,避免水流朝四周流动形成紊流,提高稳定性的同时可利用推水的反作用力实现水下机器人向前的游动。
35.水下机器人游动的方法:
36.向前游动时,左电缸25和右电缸31同时伸长,可使左脚掌12和右脚掌15向后推动,在水流反作用力下,实现水下机器向前的游动;左电缸25和右电缸31往复伸长和收缩,便可使水下机器人持续向前游动;
37.向左转向时,右电缸31单独往复伸缩,使右脚掌15单独向后划水,在水流反作用力
下,水下机器人向左转动;
38.向右转动时,左电缸25单独往复伸缩,使左脚掌12单独向后划水,在水流反作用力下,水下机器人向右转动;
39.向上浮动时,如图7所示,前肢电机26驱动拨轮27顺时针转动,使左前肢3和右前肢2的前端向上摆动,从而水下机器人在向前游动的过程中,水流从左前肢3和右前肢2的下侧流过,在水流反作用力的作用下,水下机器人逐渐上浮;
40.向下潜深时,前肢电机26驱动拨轮27逆时针转动,使左前肢3和右前肢2的前端向下摆动,从而水下机器人在向前游动的过程中,水流从左前肢3和右前肢2的上侧流过,在水流反作用力的作用下,水下机器人逐渐下潜。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1