一种船载声呐稳定器的制作方法
1.本发明涉及声呐领域,尤其涉及一种船载声呐稳定器。
背景技术:
2.声呐多用于水下通信和导航,保障船体具有更先进的探测性能和更远的探测距离,随着海洋高新技术的介入和装备的不断升级,水下地形声学探测技术获得了迅速的发展,声呐技术现已成为世界各海洋国家在海洋测绘方面的重要研究领域之一,影响声呐的稳定性因素较多,专利cn109655836a提供了一种高稳定性水下探测声呐,采用多个方向适时调节的稳定平台,减少船体振动、噪音、姿态等影响,改善探测声呐的工作环境。
3.为减少船体在水中航行产生的气泡以及水面海浪波动对声呐造成的信号干扰,需要将声呐下放至船体底部下方,让声呐处于干扰较小的环境,为船体提供远距离探测功能,因此对声呐稳定器的减震性能较高,避免船体在晃动期间造成声呐出现剧烈晃动而影响探测工作的正常进行,另外当声呐探测到前方有暗礁区域时,若船员没有及时调整船体的方向,导致声呐撞上或刮擦暗礁区域,易造成声呐损坏,影响后期船体航行期间,声呐为船体提供有效探测功能的保障性。
技术实现要素:
4.为了克服现有的声呐稳定器不具备共同拥有高减震性能和应对碰撞的有效规避措施两项功能,易影响声呐工作的稳定性的缺点,本发明提供一种船载声呐稳定器。
5.本发明的技术方案是:一种船载声呐稳定器,包括有收放组件、缓冲组件、升降组件、吸能组件、船体、安装壳、安装板、声呐和防撞杆;船体的底部安装有安装壳;安装壳的内侧通过若干个滑块结构滑动连接有安装板;安装壳的下侧设置有若干个卡块结构,安装板的外表面设置有若干个插接卡块结构的卡槽结构;安装板上连接有收放声呐的收放组件;安装板的前侧连接有缓冲组件;缓冲组件的前侧固接有两个防撞杆,防撞杆帮助声呐吸收碰撞初产生的冲击;收放组件控制缓冲组件的收展;安装壳的上侧连接有升降组件;升降组件的下侧连接有吸能组件;吸能组件连接安装板,吸能组件帮助声呐吸收碰撞后产生的冲击。
6.进一步的,安装板的上表面固接有泡沫金属。
7.进一步的,安装板的下侧开设有收纳声呐的收纳槽。
8.进一步的,两个防撞杆的下端均设置为向后弯曲的弧形结构。
9.进一步的,两个防撞杆之间固接有若干个连接杆。
10.进一步的,收放组件包括有第一转轴、第一电动推杆、第二转轴、第二电动推杆、连接块、第三转轴、轴座和凸轮;安装板的后侧转动连接有第一转轴;第一转轴的中部固接有第一电动推杆;第一电动推杆的伸缩端通过转轴转动连接声呐上侧的吊耳;安装板的前侧转动连接有第二转轴;第二转轴的左端和右端各固接有一个第二电动推杆;两个第二电动推杆的伸缩端各固接有一个连接块;两个连接块的相向侧各转动连具有一个第三转轴;两
个第三转轴的相向侧各固接有一个轴座;两个轴座分别固接声呐两侧的侧板;第二转轴的左侧和右侧各固接有一个凸轮;两个凸轮均紧贴缓冲组件。
11.进一步的,缓冲组件包括有第四转轴、扭力弹簧、转盘和楔形块;安装板的前侧转动连接有第四转轴,第四转轴位于第二转轴的前侧;第四转轴的中部与安装板之间固接有扭力弹簧,扭力弹簧套设在第四转轴的外表面;第四转轴的左端和右端各固接有一个转盘;两个转盘的后侧各固接有一个楔形块;两个楔形块分别紧贴一个凸轮;两个转盘的前侧各固接一个防撞杆。
12.进一步的,升降组件包括有驱动马达、丝杆和推板;安装壳的上侧左部和上侧右部各固接有一个驱动马达;两个驱动马达的输出端各固接有一个丝杆;两个丝杆的转轴部件均转动连接安装壳;两个丝杆之间旋接有推板;推板连接吸能组件。
13.进一步的,吸能组件包括有固定板和弹簧件;推板的下侧固接有固定板;固定板与安装板之间固接有若干个弹簧件。
14.进一步的,吸能组件还包括有弹片;固定板的四个边角与安装板之间,各固接有一个弹片。
15.本发明的有益效果是:本发明提供的船载声呐稳定器,具有两种功能形态,稳定器的安装壳安装在船体的底部,安装壳的下侧滑动连接有安装板,安装板上连接有收放声呐的收放组件,安装板的前侧连接有缓冲组件,当本船载声呐稳定器处于巡航模式时,收放组件下放声呐,让声呐处于干扰较小的环境中进行远距离、广范围的探测工作,此时安装壳内的吸能组件处于弱吸能状态,减少船体晃动期间,声呐出现晃动的时间,并且缓冲组件上安装的防撞杆处于低阻力状态;当船体将要撞上障碍物时,收放组件将声呐收起,集中声呐的探测工作范围,本船载声呐稳定器处于避险模式,由缓冲组件上的防撞杆帮助声呐吸收碰撞初产生的冲击,在声呐经过障碍物时,安装壳内的吸能组件处于强吸能状态,声呐被障碍物向上顶起,声呐推动安装板向上升起,减少声呐与障碍物接触范围,同时由吸能组件帮助声呐吸收碰撞后产生的冲击,有效减少声呐受到的损伤,从而解决了现有的声呐稳定器不具备共同拥有高减震性能和应对碰撞的有效规避措施两项功能,易影响声呐工作的稳定性的技术问题。
附图说明
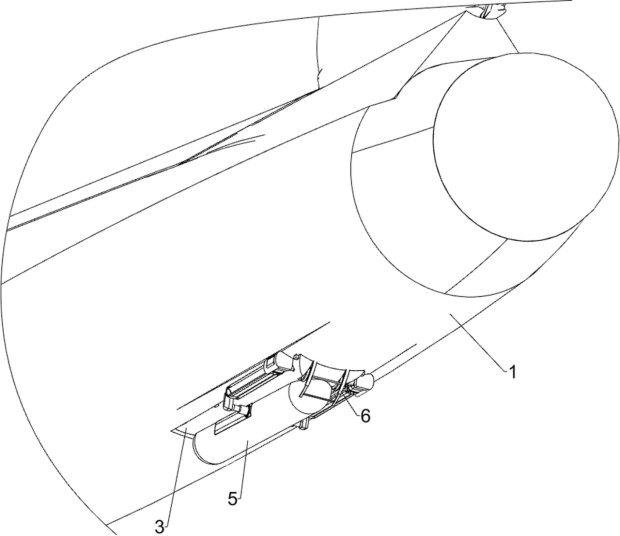
16.图1为本技术的第一种立体结构示意图;图2为本技术的船体与安装壳立体结构示意图;图3为本技术的稳定器第一种立体结构示意图;图4为本技术的安装壳剖面图;图5为本技术的稳定器第二种立体结构示意图;图6为本技术的安装壳和安装板剖面图;图7为本技术的收放组件立体结构示意图;图8为本技术的缓冲组件立体结构示意图;图9为本技术的升降组件和吸能组件第一种立体结构示意图;图10为本技术的升降组件和吸能组件第二种立体结构示意图;图11为本技术的巡航模式状态图。
17.图中零部件名称及序号:1-船体,2-安装壳,21-卡块,22-滑块,3-安装板,31-卡槽,32-收纳槽,4-泡沫金属,5-声呐,51-吊耳,52-侧板,6-防撞杆,61-连接杆,101-第一转轴,102-第一电动推杆,103-第二转轴,104-第二电动推杆,105-连接块,106-第三转轴,107-轴座,108-凸轮,201-第四转轴,202-扭力弹簧,203-转盘,204-楔形块,301-驱动马达,302-丝杆,303-推板,401-固定板,402-弹簧件,403-弹片。
具体实施方式
18.以下所述仅为本发明的较佳实施例,并不因此而限定本发明的保护范围。
19.一种船载声呐稳定器,如图1-图11所示,包括有收放组件、缓冲组件、升降组件、吸能组件、船体1、安装壳2、安装板3、声呐5和防撞杆6;船体1的底部安装有安装壳2;安装壳2的内侧设置有若干个滑块22结构;滑块22结构之间滑动连接有安装板3;安装板3的下侧开设有收纳槽32;安装壳2的下侧设置有若干个卡块21结构;安装板3的外表面设置有若干个卡槽31结构;安装板3上连接有收放组件;收放组件中连接有声呐5;安装板3的前侧连接有缓冲组件;缓冲组件的前侧固接有两个防撞杆6;两个防撞杆6的下端均设置为向后弯曲的弧形结构;两个防撞杆6之间固接有若干个连接杆61;收放组件连接缓冲组件;安装壳2的上侧连接有升降组件;升降组件的下侧连接有吸能组件;吸能组件连接安装板3;安装板3的上表面固接有泡沫金属4。
20.如图7所示,收放组件包括有第一转轴101、第一电动推杆102、第二转轴103、第二电动推杆104、连接块105、第三转轴106、轴座107和凸轮108;安装板3的后侧转动连接有第一转轴101;第一转轴101的中部固接有第一电动推杆102;第一电动推杆102的伸缩端通过转轴转动连接声呐5上侧的吊耳51;安装板3的前侧转动连接有第二转轴103;第二转轴103的左端和右端各螺栓连接有一个第二电动推杆104;两个第二电动推杆104的伸缩端各螺栓连接有一个连接块105;两个连接块105的相向侧各转动连具有一个第三转轴106;两个第三转轴106的相向侧各固接有一个轴座107;两个轴座107分别螺栓连接声呐5两侧的侧板52;第二转轴103的左侧和右侧各螺栓连接有一个凸轮108;两个凸轮108均紧贴缓冲组件。
21.如图8所示,缓冲组件包括有第四转轴201、扭力弹簧202、转盘203和楔形块204;安装板3的前侧转动连接有第四转轴201,第四转轴201位于第二转轴103的前侧;第四转轴201的中部与安装板3之间固接有扭力弹簧202,扭力弹簧202套设在第四转轴201的外表面;第四转轴201的左端和右端各固接有一个转盘203;两个转盘203的后侧各螺栓连接有一个楔形块204;两个楔形块204分别紧贴一个凸轮108;两个转盘203的前侧各固接一个防撞杆6。
22.如图9和图10所示,升降组件包括有驱动马达301、丝杆302和推板303;安装壳2的上侧左部和上侧右部各螺栓连接有一个驱动马达301;两个驱动马达301的输出端各固接有一个丝杆302;两个丝杆302的转轴部件均转动连接安装壳2;两个丝杆302之间旋接有推板303;推板303连接吸能组件。
23.如图9和图10所示,吸能组件包括有固定板401、弹簧件402和弹片403;推板303的下侧螺栓连接有固定板401;固定板401与安装板3之间固接有若干个弹簧件402;固定板401的四个边角与安装板3之间,各螺栓连接有一个弹片403。
24.本发明提供的船载声呐稳定器,具有两种功能形态,由安装壳2、安装板3和收放组件组成本船载声呐稳定器的稳定器主体,在本船载声呐稳定器处于巡航模式时,第一电动
推杆102的伸缩端推动声呐5上的吊耳51,使声呐5带动第二电动推杆104及其所连接的第二转轴103向下翻转,使第一电动推杆102和第二电动推杆104同时将声呐5向下放出,同时第二电动推杆104的伸缩端通过连接块105、第三转轴106和轴座107,推动声呐5绕吊耳51的转轴旋转,调整声呐5的姿态,如图11所示,使声呐5保持处于水平横置状态,让声呐5被下方至干扰较小的环境中进行远距离、广范围的探测工作,在此期间泡沫金属4有效的将声呐5上方的噪声隔离。
25.第一电动推杆102推动声呐5带动第二电动推杆104及其所连接的第二转轴103转动期间,此时第二电动推杆104向下翻转,即以从左往右看为基准,第二转轴103为逆时针转动,第二转轴103带动凸轮108的凸起位置向上旋转,即凸轮108此时也为逆时针转动,在凸轮108的凸起位置离开楔形块204时,楔形块204失去凸轮108的凸起位置的推挤作用,初始呈被扭转状态的扭力弹簧202带动第四转轴201转动,第四转轴201带动转盘203、楔形块204和防撞杆6向上翻转,如图11所示,使防撞杆6和连接杆61紧贴安装板3的前侧表面,此时防撞杆6和连接杆61处于低阻力状态,减少船体1航行期间,防撞杆6和连接杆61产生的阻力。
26.在巡航模式期间,驱动马达301的输出轴带动丝杆302转动,丝杆302带动推板303向下移动,推板303推动固定板401带动弹簧件402向下压缩,固定板401带动弹片403向下弯曲,使弹簧件402和弹片403均处于弱吸能状态,当船体1出现晃动期间,保证弹簧件402和弹片403有效的吸收声呐5上产生的冲击力同时,减少声呐5出现晃动的时间,并且左右两侧的弹片403被弯曲后均产生反向的弹力,使四个弹片403为声呐5提供左右反向的弹性支撑力,滤去声呐5受到的左右反向的震动碎波,从而提高声呐5工作的稳定性。
27.当声呐5识别到船体1前方出现暗礁或其余障碍物期间,若船员没有及时调整船体1的航行姿态,在船体1将即将撞上障碍物时,本船载声呐稳定器需要变换为避险模式,第一电动推杆102的伸缩端迅速带动声呐5向上收回至收纳槽32中,并使声呐5带动第二电动推杆104及其所连接的第二转轴103反向转动复位,以从左往右看为基准,此时第二转轴103为顺时针转动,凸轮108跟随第二转轴103顺时针转动,此时凸轮108的凸起位置向下旋转,使得凸轮108的凸起位置推动楔形块204,继而使得楔形块204带动转盘203逆时针转动,继而转盘203带动防撞杆6向下翻转复位,使防撞杆6抵挡在声呐5的前方。
28.在本船载声呐稳定器变换为避险模式期间,驱动马达301的输出轴带动丝杆302反向转动,丝杆302带动推板303向上移动,推板303带动固定板401、弹簧件402和弹片403向上复位,使弹簧件402和弹片403均处于强吸能状态。
29.在船体1撞上障碍物时,防撞杆6和连接杆61撞击在障碍物上,帮助声呐5吸收撞击初期产生的冲击力,在声呐5经过障碍物期间,声呐5受到被障碍物的阻挡而被其向上顶起,声呐5与障碍物接触范围,使声呐5推动安装板3,带动安装板3沿滑块22向安装壳2内部升起,此时卡块21离开卡槽31,同时安装板3推动弹簧件402向上收缩,安装板3带动弹片403向上弯曲,实现弹簧件402和弹片403帮助声呐5吸收撞击后期产生的冲击力,有效控制声呐5进行碰撞规避,从而减少声呐5受到的损伤。
30.以上对本技术进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1