一种双体式无人船
1.本实用新型涉及环保清洁船技术领域,具体涉及一种双体式无人船。
背景技术:
2.目前,河流漂浮物打捞作业主要有人工打捞和大型机械作业两种方式,前者工具简陋且消耗大量人力物力,工作累且效率极低;后者体积大吃水量大,仅适用于大江大河,在更容易积攒生活垃圾的湖水和小河流中很难施展的开。我国水污染治理行业正处于劳神伤财阶段,但市场规模正逐步稳定增长,因此产生的需求也会十分巨大。针对现有技术存在以下问题:
3.1、现有的无人船在使用时,收集漂浮物的收纳容积较小,需要经常性的清理漂浮物,导致降低无人船作业效率的问题;
4.2、现有的无人船在进行收集漂浮物时,无法识别垃圾大小,不能判断是否为船体可收纳的尺寸,导致无人船实用性较差的问题。
技术实现要素:
5.本实用新型提供一种双体式无人船,其中一种目的是为了具备提高漂浮物收纳容积的特点,解决现有的无人船在使用时,收集漂浮物的收纳容积较小,需要经常性的清理漂浮物,导致降低无人船作业效率的问题;其中另一种目的是为了解决现有的无人船在进行收集漂浮物时,无法识别垃圾大小,不能判断是否为船体可收纳的尺寸,导致无人船实用性较差的问题,以达到便于自动识别漂浮物的大小,提高无人船的实用性。
6.为解决上述技术问题,本实用新型所采用的技术方案是:
7.一种双体式无人船,包括无人船本体,所述无人船本体顶部的一侧设置有第一驱动机构,所述第一驱动机构包括有电机,所述电机的输出端固定连接有第一连杆,所述无人船本体的顶部开设有固定槽,所述固定槽的内腔设置有二号收纳框,所述二号收纳框的上方设置有一号收纳筐,所述无人船本体顶部的一侧设置有图像识别机构,所述图像识别机构包括有图像识别摄像头,所述图像识别摄像头的内部设置有传感器,所述传感器与图像识别摄像头电性连接。
8.本实用新型技术方案的进一步改进在于:所述第一连杆的一端活动连接有第二连杆,所述第二连杆的一端活动连接有第三连杆,所述第三连杆的一端活动连接在一号收纳筐外壁顶部的中部。
9.本实用新型技术方案的进一步改进在于:所述无人船本体的顶部固定连接有支撑架,所述支撑架外壁的一侧活动连接有第四连杆,所述第四连杆的一端活动连接在一号收纳筐外壁顶部的一侧,所述第三连杆的另一端活动连接在支撑架外壁的另一侧。
10.本实用新型技术方案的进一步改进在于:所述无人船本体顶部的一侧固定连接头有安装座,所述图像识别摄像头的底部固定安装在安装座的顶部。
11.本实用新型技术方案的进一步改进在于:所述无人船本体的顶部的另一侧设置有
第二驱动机构,所述第二驱动机构与第一驱动机构的结构相同。
12.由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
13.1、本实用新型提供一种双体式无人船,通过采用一号收纳筐和二号收纳框的配合,保证船体大小不变的情况下,扩大漂浮物的收纳容积,同时通过第一驱动机构和第二驱动机构的配合,便于带动一号收纳筐移动,方便工作人员清理漂浮物,避免了有的无人船在使用时,收集漂浮物的收纳容积较小,需要经常性的清理漂浮物,导致降低无人船作业效率的问题,使得提高无人船整体容纳体积,提升作业效率。
14.2、本实用新型提供一种双体式无人船,通过采用图像识别摄像头的图像识别功能配合传感器,识别物体水平宽度和垂直高度,进行判断一号收纳筐和二号收纳框是否能收纳漂浮物,现有的无人船在进行收集漂浮物时,无法识别垃圾大小,不能判断是否为船体可收纳的尺寸,导致无人船实用性较差的问题,以达到便于自动识别漂浮物的大小,便于无人船进行收纳漂浮物,提高无人船的实用性。
附图说明
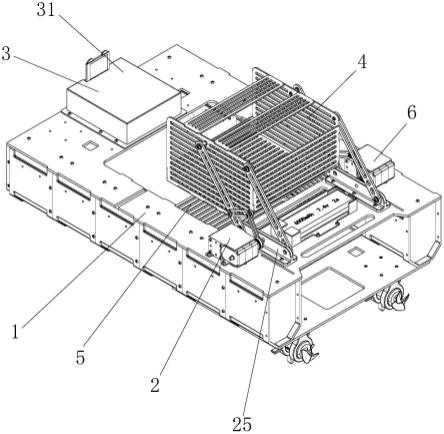
15.图1为本实用新型的结构示意图;
16.图2为本实用新型无人船本体的结构侧视图;
17.图3为本实用新型无人船本体的结构示意图;
18.图4为本实用新型无人船本体的结构仰视图。
19.图中:1、无人船本体;2、第一驱动机构;3、图像识别机构;4、一号收纳筐;5、二号收纳框;6、第二驱动机构;21、电机;22、第一连杆;23、第二连杆;24、第三连杆;25、支撑架;26、第四连杆;31、图像识别摄像头;32、安装座。
具体实施方式
20.下面结合实施例对本实用新型做进一步详细说明:
21.实施例1
22.如图1-4所示,本实用新型提供了一种双体式无人船,包括无人船本体1,无人船本体1的顶部开设有固定槽,固定槽的内腔设置有二号收纳框5,二号收纳框5的上方设置有一号收纳筐4。
23.在本实施例中,通过一号收纳筐4和二号收纳框5,保证船体大小不变的情况下,扩大漂浮物的收纳容积,进而提高整体容纳体积,大幅度提升了无人船的工作效率。
24.实施例2
25.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:优选的,无人船本体1顶部的一侧设置有第一驱动机构2,第一驱动机构2包括有电机21,电机21的输出端固定连接有第一连杆22,第一连杆22的一端活动连接有第二连杆23,第二连杆23的一端活动连接有第三连杆24,第三连杆24的一端活动连接在一号收纳筐4外壁顶部的中部,无人船本体1的顶部固定连接有支撑架25,支撑架25外壁的一侧活动连接有第四连杆26,第四连杆26的一端活动连接在一号收纳筐4外壁顶部的一侧,第三连杆24的另一端活动连接在支撑架25外壁的另一侧,无人船本体1的顶部的另一侧设置有第二驱动机构6,第二驱动机构6与第一驱动机构2的结构相同。
26.在本实施例中,同时通过第一驱动机构2和第二驱动机构6的电机21带动第一连杆22的一端转动,第一连杆22的另一端同时通过第二连杆23和第三连杆24带动一号收纳筐4移动,一号收纳筐4移动的同时带动第四连杆26的一端移动,同时第四连杆26的另一端在支撑架25外壁的一侧转动,使得便于对一号收纳筐4进行移动,方便工作人员进行清理漂浮物。
27.实施例3
28.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:优选的,无人船本体1顶部的一侧设置有图像识别机构3,图像识别机构3包括有图像识别摄像头31,图像识别摄像头31的内部设置有传感器,传感器与图像识别摄像头31电性连接,无人船本体1顶部的一侧固定连接头有安装座32,图像识别摄像头31的底部固定安装在安装座32的顶部。
29.在本实施例中,通过图像识别摄像头31的图像识别功能配合传感器,主动识别水面漂浮物大小,并识别物体水平宽度和垂直高度,进行判断是否为一号收纳筐4和二号收纳框5收纳的尺寸,提高无人船的实用性。
30.下面具体说一下该双体式无人船的工作原理。
31.如图1-4所示,使用时,通过一号收纳筐4和二号收纳框5,扩大漂浮物的收纳容积,再同时通过第一驱动机构2和第二驱动机构6的电机21带动第一连杆22的一端转动,第一连杆22的另一端同时通过第二连杆23和第三连杆24带动一号收纳筐4移动,一号收纳筐4移动的同时带动第四连杆26的一端移动,使得第四连杆26的另一端在支撑架25的外壁转动,通过图像识别摄像头31的图像识别功能配合传感器,识别漂浮物水平宽度和垂直高度,进行判断是否为一号收纳筐4和二号收纳框5收纳的尺寸。
32.上文一般性的对本实用新型做了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本实用新型思想精神的修改或改进,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1