一种仿生水黾机器人
1.本实用新型涉及水上农业仿生机械技术领域,具体而言,涉及一种仿生水黾机器人。
背景技术:
2.仿生技术研究是当今机器人研究领域内的前沿课题,模拟各种生物在各种特定条件下的卓越功能,制造出可以代替人类从事恶劣环境下工作的仿生机器人,是研究的最终目标。
3.传统水上机械主要运用浮力来使自身漂浮于水面,而对于小型水上机器人来说,只靠浮力来支撑自身是远远不够的。为了让机器人能漂浮与水面,最简单有效的方法是利用水的表面张力来提供支持力,弥补浮力的不足。自然界中也有许多利用表面张力来浮于水上的例子,如水黾。因此研究水黾的水上漂浮机制对小型水上机器人的结构设计具有指导意义。
4.目前,现有的仿生水黾机器人可以实现水上漂浮和移动,但是,现有技术的仿生水黾机器人缺乏水黾特征的真实性,运动能力和负载能力差、设计复杂等,以上种种缺点,导致其难以应用于实际应用中。
技术实现要素:
5.本实用新型提供一种仿生水黾机器人,用以克服现有技术中存在的至少一个技术问题。
6.为达到上述技术目的,本实用新型一种仿生水黾机器人,包括:固定装置、控制装置、两个动力装置以及四个漂浮装置;
7.所述固定装置包括四个连接件、防水箱体和箱盖;四个所述连接件分别置于所述防水箱体的前后两侧,所述箱盖固定在所述防水箱体上端,所述防水箱体边缘与所述箱盖贴合。
8.所述控制装置包括单片机和电池;所述单片机和所述电池固定在所述固定装置中的所述防水箱体内部,所述单片机固定于所述防水箱体前侧位置,所述电池固定于所述防水箱体后侧位置;所述控制装置整体固定在所述防水箱体内部。
9.所述动力装置包括减速电机、划水腿、密封圈和垫圈;所述减速电机固定在所述防水箱体两侧的中心位置,所述减速电机的转轴通过密封圈固定于所述防水箱体两侧的中心位置,所述划水腿通过垫圈与减速电机转轴连接;所述减速电机的转轴通过所述防水箱体的两侧圆孔伸出所述固定装置外,使所述动力装置固定在所述固定装置两侧;所述减速电机固定在固定装置中防水箱体的中间凹槽中。
10.所述漂浮装置包括支撑腿和圆矩形螺旋脚;所述支撑腿前端通过所述连接件的异径外接头与所述防水箱体固连,所述圆矩形螺旋脚与所述支撑腿后端固连;通过所述支撑腿与所述防水箱体连接,以使整个所述漂浮装置固连在所述固定装置外侧。
11.可选的,四个所述连接件分别通过密封圈与所述防水箱体的前后两侧密封隼合。
12.可选的,所述防水箱体底端为曲面。
13.可选的,所述防水箱体表面涂抹超疏水材料涂层。
14.可选的,所述连接件为一个类似异径外接头或同径外接头。
15.可选的,所述电池为纽扣电池。
16.可选的,所述划水腿表面涂抹超疏水材料涂层。
17.可选的,所述漂浮装置表面涂抹超疏水材料涂层。
18.可选的,所述圆矩形螺旋脚的圆形半径为5mm-25mm,矩形长度为50 mm,螺旋线宽度为1.9 mm。
19.本实用新型实施例的创新点包括:
20.1、本实用新型通过采用圆矩形螺旋脚,所述圆矩形螺旋脚的圆矩形设计能使所述机器人水面上的表面张力达到极致的效果,让所述机器人在水面上依靠其表面张力在水面上漂浮,体现了仿生水黾的真实性;并且能够承受一定的负载,且维稳能力强。是本实用新型实施例的创新点之一。
21.2、本实用新型中所述防水箱体底端为曲面,提高了所述机器人的稳定性和承受负载的能力;所述防水箱体表面涂抹超疏水材料涂层,可以提高所述机器人防腐能力和使用寿命,同时使所述机器人能做到表面自清洁且使所述机器人表面张力效果更显著。是本实用新型实施例的创新点之一。
22.3、本实用新型通过所述单片机控制所述减速电机的转速来控制划水腿的转动,可以使所述仿生水黾在水平面内自由运动。是本实用新型实施例的创新点之一。
23.4、本实用新型中的装置设计简单,且材料成本低,可以实现以低廉的成本达到最佳效果。是本实用新型实施例的创新点之一。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
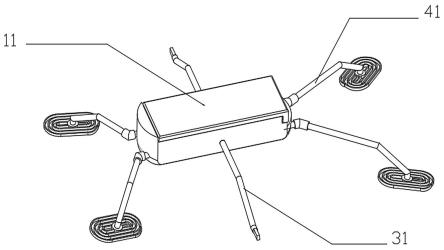
25.图1为本实用新型实施例提供的一种仿生水黾机器人的整体结构示意图;
26.图2为本实用新型实施例提供的一种仿生水黾机器人的内部结构示意图;
27.图3为11-固定装置部分结构示意图;
28.图4为21-控制装置部分结构示意图;
29.图5为31-动力装置部分结构示意图;
30.图6是41-漂浮装置部分结构示意图;
31.图7是43-圆矩形螺旋脚部分结构示意图;
32.图中:11-固定装置,21-控制装置,31-动力装置,41-漂浮装置,12-连接件,13-密封圈,14-防水箱体,15-箱盖,22-单片机,23-电池,32-减速电机,33-密封圈,34-垫圈,35-划水腿,42-支撑腿,43-圆矩形螺旋脚。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.需要说明的是,本实用新型实施例及附图中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
35.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
36.实施例1:
37.本实施例提供一种仿生水黾机器人,所述机器人包括固定装置、控制装置、动力装置以及漂浮装置;所述固定装置中防水箱体的设计能够保证箱体内部件与水隔绝;所述控制装置通过所述单片机实时控制所述机器人的运行速度和方向;所述动力装置中通过减速电机的转轴运作带动划水腿的转动实现所述机器人灵敏快速运动;所述漂浮装置能够使所述机器人表面张力达到最好的效果,并且可以承受一定的负载。
38.可以参见图1、图2、图3、图4、图5及图6,本实施例提供一种仿生水黾机器人,包括固定装置11、控制装置21、两个动力装置31以及四个漂浮装置41。
39.所述固定装置11包括四个连接件12、防水箱体14和箱盖15;四个所述连接件12分别置于所述防水箱体14的前后两侧,所述箱盖15固定在所述防水箱体14上端,所述防水箱体14边缘与所述箱盖15贴合。
40.所述控制装置21包括单片机22和电池23;所述单片机22和所述电池23固定在所述固定装置11中的所述防水箱体14内部,所述单片机22固定于所述防水箱体14前侧位置,所述电池23固定于所述防水箱体14后侧位置;所述控制装置21整体固定在所述防水箱体14内部。
41.所述动力装置31包括减速电机32、划水腿35、密封圈33和垫圈34;所述减速电机32固定在所述防水箱体14两侧的中心位置,所述减速电机32的转轴通过密封圈33固定于所述防水箱体14两侧的中心位置,所述划水腿35通过垫圈34与减速电机32转轴连接。所述减速电机32的转轴通过所述防水箱体14的两侧圆孔伸出所述固定装置11外,使所述动力装置31固定在所述固定装置11两侧;所述减速电机32固定在固定装置11中防水箱体14的中间凹槽中。
42.所述漂浮装置41包括支撑腿42和圆矩形螺旋脚43;所述支撑腿42前端通过所述连接件12的异径外接头与所述防水箱体14固连,所述圆矩形螺旋脚43与所述支撑腿42后端固连;通过所述支撑腿42与所述防水箱体14连接,以使整个所述漂浮装置41固连在所述固定
装置11外侧。
43.在实施过程中,所述单片机22控制所述两个减速电机32的转速,减速电机32转轴运作带动所述划水腿35转动,从而实现所述机器人在水面上的自由移动;
44.可以理解的,通过所述单片机22控制两个减速电机32的转速的差值,使得所述划水腿35转速不同,实现所述机器人在不同方位的移动;
45.可以理解的,所述圆矩形螺旋脚43的设计充分使得其表面张力达到最大,从而使得所述机器人能够漂浮在水面上并具有一定的承受负载的能力;
46.可以理解的,所述圆矩形螺旋脚43的结构使得所述机器人具有一定的维稳能力有一定的抗风抗浪能力。
47.可见,本实施例提供一种仿生水黾机器人,通过所述单片机控制所述减速电机的转轴转速,能实现所述机器人在水面上的前进和拐弯指令;所述固定装置中防水箱体的设计,可以使所述机器人保持良好的密封性;所述漂浮装置中圆矩形螺旋脚,可以使所述机器人在水面上的表面张力达到极致的效果,可使得所述机器人能够漂浮在水面上,并且能够承受一定的负载,且维稳能力强。其次,可以理解的,本实用新型设计简单,且材料成本低,可以实现以低廉的成本达到最佳效果。
48.实施例2:
49.本实施例提供一种仿生水黾机器人,所述机器人包括固定装置、控制装置、动力装置以及漂浮装置;所述固定装置中防水箱体的设计能够保证箱体内部件与水隔绝;所述控制装置通过所述单片机实时控制所述机器人的运行速度和方向;所述动力装置中通过减速电机的转轴运作带动划水腿的转动实现所述机器人灵敏快速运动;所述漂浮装置中圆矩形螺旋脚的圆矩形螺旋设计能够使所述机器人表面张力达到最好的效果,并且可以承受一定的负载。
50.可以参见图1、图2、图3、图4、图5及图6,本实施例提供一种仿生水黾机器人,包括固定装置11、控制装置21、两个动力装置31以及四个漂浮装置41。
51.其中,参照图3,本实施例中,所述固定装置11包括四个连接件12,四个密封圈13,防水箱体14,箱盖15。
52.具体的,所述箱盖15固定于所述防水箱体14顶端,所述防水箱体14边缘与所述箱盖15贴合;四个所述连接件12分别置于所述防水箱体14的前后两侧,所述连接件12通过密封圈13与所述防水箱体14相固连。
53.需要说明的是,所述防水箱体14底端为曲面,提高了所述机器人的稳定性和承受负载的能力;
54.进一步的,所述防水箱体14表面涂抹超疏水材料涂层,具体的,所述超疏水材料涂层为氟硅化物涂料;
55.可以理解的,所述氟硅化物涂料可以提高所述机器人防腐能力和使用寿命,同时使所述机器人能做到表面自清洁且使所述机器人表面张力效果更显著。
56.需要说明的是,所述连接件12结构为一个类似异径外接头(连接两个直径不同的圆管)或同径外接头(连接两个直径相同的圆管)。
57.需要说明的是,所述连接件12通过所述防水箱体14前后四个对称圆孔伸入所述防水箱体14内部,通过密封圈13与所述防水箱体14相固连。
58.其中,参照图4,本实施例中,所述控制装置21包括单片机22和电池23。
59.具体的,所述单片机22和所述电池23固定在所述固定装置11中的所述防水箱体14内部,所述单片机22固定于所述防水箱体14前侧位置,所述电池23固定于所述防水箱体14后侧位置。
60.进一步的,所述电池23可为纽扣电池。
61.可以理解的,所述控制装置21整体固定在所述防水箱体14内部。
62.其中,参照图5,本实施例中,所述动力装置31包括减速电机32、划水腿35、密封圈33、垫圈34。
63.具体的,所述减速电机32固定在所述防水箱体14两侧的中心位置,所述减速电机32的转轴通过密封圈33固定于所述防水箱体14两侧的中心位置,所述划水腿35通过垫圈34与减速电机32转轴连接。
64.可以理解的,所述减速电机32的转轴通过所述防水箱体14的两侧圆孔伸出所述固定装置11外,使所述动力装置31固定在所述固定装置11两侧。
65.需要说明的是,所述减速电机32是固定在固定装置11中防水箱体14的中间凹槽中。
66.进一步的,所述划水腿35表面涂敷一层超疏水材料涂层,使得其具有疏水特性。
67.其中,参照图6及图7,本实施例中,所述漂浮装置41包括支撑腿42和圆矩形螺旋脚43。
68.具体的,所述支撑腿42前端通过所述连接件12的异径外接头与所述防水箱体14固连,所述圆矩形螺旋脚43与所述支撑腿42后端固连。
69.需要说明的是,所述漂浮装置41表面涂抹超疏水材料涂层。
70.可以理解的,通过所述支撑腿42与所述防水箱体14连接,以使整个所述漂浮装置41固连在所述固定装置11外侧。
71.具体的,参照图7,所述圆矩形螺旋脚43为特殊的圆矩形形状。
72.进一步的,所述圆矩形螺旋脚43焊接在所述支撑腿42后端上;所述圆矩形螺旋脚43的圆形半径为5mm-25mm,矩形长度为50 mm,螺旋线宽度为1.9 mm。
73.在实施过程中,所述单片机22控制所述两个减速电机32的转速,减速电机32转轴运作带动所述划水腿35转动,从而实现所述机器人在水面上的自由移动;
74.可以理解的,通过所述单片机22控制两个减速电机的转速的差值,使得所述划水腿35转速不同,实现所述机器人在不同方位的移动;
75.可以理解的,所述圆矩形螺旋脚43的设计充分使得其表面张力达到最大,从而使得所述机器人能够漂浮在水面上并具有一定的承受负载的能力;
76.可以理解的,所述圆矩形螺旋脚43的结构使得所述机器人具有一定的维稳能力有一定的抗风抗浪能力。
77.可见,本实施例提供一种仿生水黾机器人,通过所述单片机控制所述减速电机的转轴转速,能实现所述机器人在水面上的前进和拐弯指令;所述固定装置中防水箱体的设计,可以使所述机器人保持良好的密封性,而所述防水箱体的下端设计,可有效增加所述机器人承受负载的能力和稳定性;所述漂浮装置中圆矩形螺旋脚的圆矩形设计,可以使所述机器人在水面上的表面张力达到极致的效果,可使得所述机器人能够漂浮在水面上,并且
能够承受一定的负载,且维稳能力强。其次,可以理解的,本实用新型设计简单,且材料成本低,可以实现以低廉的成本达到最佳效果。
78.本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的模块或流程并不一定是实施本实用新型所必须的。
79.本领域普通技术人员可以理解:实施例中的设备中的模块可以按照实施例描述分布于实施例的设备中,也可以进行相应变化位于不同于本实施例的一个或多个设备中。上述实施例的模块可以合并为一个模块,也可以进一步拆分成多个子模块。
80.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1