一种可长航时宽速域高机动巡飞的无人飞行器的制作方法
[0001]
本发明实施例涉及飞行器技术,尤其涉及一种可长航时宽速域高机动巡飞的无人飞行器。
背景技术:
[0002]
巡飞无人飞行器是一种能在目标区进行巡逻飞行,可执行侦察、打击、通信、中继等多种任务的新概飞行器。目前,为满足其执行综合性任务的性能,并考虑外部环境的多变性,巡飞无人飞行器应具有高机动、快速到达打击、长航时等特性。常规巡飞无人飞行器往往只能满足所述性能其中之一,而无法同时兼顾高、低速性能要求。其飞行任务通常有一定的局限性,无法随外界复杂多变的环境调整出合理的姿态,难以最大程度发挥优势所在。在实际使用中,针对不同速度需求以及任务类型,具有变体机构的巡飞无人飞行器,可增加其使用中的灵活性。
[0003]
通常,对于高速高机动的飞行任务,常规巡飞无人飞行器机翼后掠,采用小展弦比机翼降低波阻;对于低速长航时的飞行任务,常规巡飞无人飞行器采用大展弦比机翼提高升力。而具有变体机构的新概念巡飞无人飞行器,其根据对速度需求的需要,可主动或半主动地实现在高速高机动时机翼向机身后部转动,同时外翼段沿展向内缩;在低速长航时机翼向机身前部转动,外翼段沿展向外伸,同时调整各机翼上的气动舵面,控制动力装置,提升气动效率,实现了长航时的设计目标;在满足高速高机动飞行的同时,又能实现低速亚音速长时间巡飞,大大扩展巡飞无人飞行器速域范围。
技术实现要素:
[0004]
本发明提供一种可长航时宽速域高机动巡飞的无人飞行器,能够根据任务的不同,机身两侧的两个可变体折叠机翼可在机翼所在平面内转动从而改变后掠角,同时,伸缩外翼和机身尾部的可折叠上v型尾翼和可折叠腹鳍,提高巡飞无人飞行器对任务的适应能力和执行能力。
[0005]
本发明提供一种可长航时宽速域高机动巡飞的无人飞行器,包括:
[0006]
机身、设置在所述机身两侧两个可折叠的内翼段,设置在所述内翼段并沿展向可伸缩的外翼段,设置在所述机身尾部的可折叠上v型尾翼和可折叠腹鳍,以及可选安装涡喷动力、活塞动力、涡喷/活塞双动力的机身尾部。
[0007]
所述机身两侧两个可折叠的内翼段,沿所述机身的纵向对称地设置于机身前半部的两侧。
[0008]
所述沿展向可伸缩的外翼段,对称地设置于内翼段的外侧。
[0009]
所述可折叠机翼的内翼段设置一对一体襟副翼,外翼段设置一对副翼。
[0010]
可选地,所述巡飞无人飞行器尾部分为上下两层动力舱,双动力安装时采取涡喷在上,活塞在下的安装方式;单动力安装时可选装上层涡喷动力或下层活塞动力。安装任一动力方式应满足推力轴线与全机质心间距小于机身高度5%的要求。
[0011]
可选地,所述可变体折叠机翼翼型为兼顾低速特性的特殊超临界翼型。
[0012]
可选地,所述可变体折叠机翼相对机身安装位置为上单翼或中单翼。
[0013]
可选地,所述可折叠上v型尾翼和可折叠腹鳍翼型为naca0012或者其他系列对称翼型。
附图说明
[0014]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。应当理解,下面描述中的附图是本发明的一些实施例,用来提供对本发明的进一步理解而并不构成对本发明的限制。
[0015]
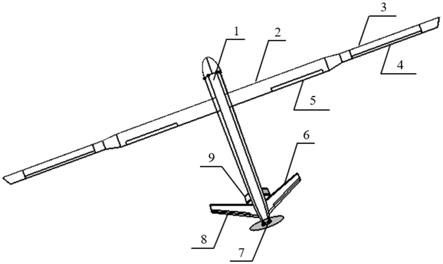
图1为本发明实施例提供的一种可长航时宽速域高机动巡飞的无人飞行器在低速长航时巡飞状态下飞行姿态示意图;
[0016]
图2为本发明实施例提供的一种可长航时宽速域高机动巡飞的无人飞行器在变速域长航时巡飞状态下飞行姿态示意图;
[0017]
图3为本发明实施例提供的一种可长航时宽速域高机动巡飞的无人飞行器在变速域快速抵达状态下飞行姿态示意图;
[0018]
图4为本发明实施例提供的一种可长航时宽速域高机动巡飞的无人飞行器在高速高机动状态下飞行姿态示意图;
[0019]
附图标记说明:
[0020]
1:机身;2:可折叠内翼段;3:可伸缩外翼段;4:外翼段一对副翼;5:内翼段一对一体襟副翼;6:上v型尾翼;7:动力装置;8:上v型尾翼气动舵面;9:腹鳍;
具体实施方式
[0021]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明保护内容。
[0022]
本实施例提供的可长航时宽速域高机动巡飞的无人飞行器主要包括:机身1,可折叠机翼内翼段2,沿展向可伸缩的外翼段3,外翼段一对副翼4,内翼段一对一体襟副翼5,上v型尾翼6,动力装置7,上 v型尾翼气动舵面8,腹鳍9。
[0023]
为便于变体可折叠机翼折叠收放,机翼内翼段长度大于机身长度的70%,初始状态下内翼折叠紧贴于机身1表面,发射后机翼2由系统操纵绕其根部转轴,于其所在平面内,向机身前部转动,系统根据传感器控制根部转轴转角,以调整内翼段在不同速度下的位置;若系统接到回收指令,则系统操纵根部转轴使机翼转动为初始状态。
[0024]
沿展向可伸缩的外翼段3展长不小于内翼段展长的80%;初始状态下,其嵌于内翼段中,由控制机构根据执行任务类型操纵外翼段的伸展长度;若系统接到回收指令,同样地由控制机构操纵外翼段的收缩,使其缩入内翼段回到初始状态。
[0025]
可折叠上v型尾翼6和可折叠腹鳍9,初始状态下,尾翼和腹鳍均嵌于机身内,上v型尾翼所在平面与机身纵向对称面平行,腹鳍与机身纵向对称面夹角可设置为0~30
°
;发射后由电力驱动上v型尾翼和腹鳍根部转轴,使得上v型尾翼、腹鳍于初始所在平面内转动一定角度直到立起变为垂直状态,其后上v 型尾翼和腹鳍继续由驱动机构沿机身周向转动一
定角度形成一定外倾角;若系统接到回收指令,则系统操纵驱动机构使尾翼和腹鳍沿其展开的逆路线进行折叠;
[0026]
可选地,机身的横截面采用圆形,这使得在相同机身体积下,圆形横截面机身具有最小的表面积,进而使机身的摩擦阻力最小。
[0027]
可选地,机身尾部设计为可组合安装涡喷/活塞单双动力形式的两层动力舱。上下舱之间隔板选用陶瓷基复合材料承受高温。
[0028]
可选地,机身材料可采用合金和碳纤维复合材料。其中,机身外框主要由合金组成以增强机身承载能力,其他部位主要由复合材料组成以有效降低全机重量。本实施例并不对所述机身材料选择进行限定。
[0029]
可选地,可长航时宽速域高机动巡飞的无人飞行器其发射阶段可采用弹射发射或发射箱发射方式,也可以机载投放,近距离侦察或攻击任务时由单兵发射。本实施例并不对所述巡飞无人飞行器的发射方式进行限定。
[0030]
本发明实施例提供的一种可长航时宽速域高机动巡飞的无人飞行器配备的可折叠内翼段,可沿展向伸缩的外翼段以及机身尾部的可折叠上v型尾翼、可折叠腹鳍和动力装置。根据任务的不同,可折叠主翼的展开后与机身轴线的夹角不同,伸缩外翼伸长值也有所不同。当巡飞无人飞行器做低速长航时巡飞时,如图1、图2所示,机身主翼向机身前部转动形成长直机翼,同时伸缩外翼展项向外扩展增大展弦比,从而提高了机翼的升力和全机的升阻比。当巡飞无人飞行器做高速机动时,如图3、图4所示,机身主翼向机身后部转动形成后掠,同时伸缩外翼沿展项向内收缩减小展弦比,以降低波阻,从而提升临界速度,最终保证巡飞无人飞行器的高效飞行。以上变体可折叠机翼随飞行速度不同在其所在平面内转动,可以有效提高巡飞无人飞行器对不同任务类型的适应能力,在复杂多变的环境下拥有更加出色的表现。
[0031]
最后应说明的是:以上各实施例仅为对本发明技术方案的说明,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,对于本领域的技术人员而言,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1