深空探测器推力矢量偏差的器上姿态补偿方法及系统与流程
[0001]
本发明涉及姿态动力学领域,具体地,涉及深空探测器推力矢量偏差的器上姿态补偿方法及系统。
背景技术:
[0002]
深空探测器为了实现脱离地球引力、进入巡航轨道或进入星地间转移轨道以及再入行星、绕飞行星等目标,需多次变轨以满足节约燃料、修正入轨精度等要求。同时,在再入大气、行星捕获等关键变轨环节中,通常仅有一次变轨机会,且需要较高的轨控精度以保障后续任务。在行星捕获阶段,探测器需点火减速,点火方向的偏差极有可能导致探测器无法形成环绕轨道,更严重则撞入行星任务失败。在再入阶段点火方向的偏差则会导致落点偏离预定位置,甚至无法进入大气。因此轨控阶段的控制精度是影响任务成败的重要环节。
[0003]
影响轨控方向精度的主要因素来自推力器的偏差。通常推力器地面安装误差在0.2
°
左右,另外受深空复杂外热流环境影响,在轨飞行过程中推力器还会发生结构热变形,推力矢量的偏差情况更加恶劣。
[0004]
目前,提高轨控精度的主要手段大多采用多次变轨迭代修正的方法。完备、杜耀珂、沈阳等在“编队任务多脉冲控制条件下的推力器在轨自主标定方法”(cn 106094529 a)中,使用地面测定轨的方式,测出每次变轨轨控偏差,并用偏差量修正下一次变轨。多次迭代逐步实现高精度的轨道控制。该方法适用多频次、小推力的变轨修正,对于仅有一次机会的变轨则无法使用。
[0005]
徐明、汪作鹏、魏延等在“一种基于加速度计的偏无拖曳卫星的干扰补偿控制方法”(cn 104090493 a)中,使用加速度计测量值补偿在轨卫星受到的干扰力和力矩,以保证卫星轨道的稳定,该方法多用于为科学仪器提供无干扰的空间试验平台,无法应用于高精度变轨过程。
[0006]
唐歌实、陈莉丹、刘勇在“嫦娥一号卫星轨控标定方法与实现”(见《中国空间科学与技术》,2009年12月,第6期,页码1-6)中,提出了利用轨控前和轨控后的轨道数据,以及轨控过程中星敏姿态、加速度遥测对沉底发动机、主发动机、加速度计刻度系数进行标定,并将标定结果引入后续轨控任务,大大提高了控制精度。但该方法仍旧无法应用在仅一次变轨机会的场合,此外,若标定参数因空间外热流等因素发生变化,该方法将失效。
[0007]
陈莉丹、李革非、谢剑锋等在“轨控标定方法研究及在交会对接中的应用”(见《载人航天》,2014年1月,第1期,页码16-20)中,采用了以轨道要素的控制结果作为标定依据,将光压、气动阻力等干扰力矩作为推力矢量偏差的一部分,以当圈标定结果作为下一次轨控的输入依据。该方法仅能适应具有高精度测定轨条件的航天器的轨道控制,无法应用在深空探测领域。
[0008]
本发明提出的深空探测器推力矢量实时修正方法,采用加速度计实时测量轨控时速度增量与目标值的偏差,并实时修正轨控姿态,实现高精度的轨道控制。
技术实现要素:
[0009]
针对现有技术中的缺陷,本发明的目的是提供一种深空探测器推力矢量偏差的器上姿态补偿方法及系统。
[0010]
根据本发明提供的一种深空探测器推力矢量偏差的器上姿态补偿方法,包括:
[0011]
步骤m1:根据地面的发动机推力方向标定的结果,计算轨控期间姿态补偿修正量;
[0012]
步骤m2:将轨控期间姿态补偿修正量上注到器上实施,补偿航天器推力器的推力方向偏差。
[0013]
优选地,所述步骤m1包括:
[0014]
步骤m1.1:根据地面的发动机推力方向标定的结果,计算推力矢量在本体系下投影l;
[0015]
步骤m1.2:根据推力矢量在本体系下投影l,计算姿态修正四元数δq;
[0016]
步骤m1.3:根据姿态修正四元数δq,计算修正后的点火目标姿态。
[0017]
优选地,所述步骤m1.1包括:
[0018]
计算推力矢量在本体系下投影l计算公式如下:
[0019][0020]
其中,c
fb
表示推力器相对卫星本体系的安装矩阵,α、β表示地面标定推力器偏差角度。
[0021]
优选地,所述步骤m1.2包括:
[0022][0023]
其中,标称推力矢量在本体系下投影为[100];l为实际推力矢量在本体系的投影;l(1)表示推力矢量在本体系x轴上的投影。
[0024]
优选地,所述步骤m1.3包括:
[0025][0026]
其中,q
bo
为修正前目标姿态;q
′
bo
表示修正后目标姿态。
[0027]
根据本发明提供的一种深空探测器推力矢量偏差的器上姿态补偿系统,包括:
[0028]
模块m1:根据地面的发动机推力方向标定的结果,计算轨控期间姿态补偿修正量;
[0029]
模块m2:将轨控期间姿态补偿修正量上注到器上实施,补偿航天器推力器的推力方向偏差。
[0030]
优选地,所述模块m1包括:
[0031]
模块m1.1:根据地面的发动机推力方向标定的结果,计算推力矢量在本体系下投影l;
[0032]
模块m1.2:根据推力矢量在本体系下投影l,计算姿态修正四元数δq;
[0033]
模块m1.3:根据姿态修正四元数δq,计算修正后的点火目标姿态。
[0034]
优选地,所述模块m1.1包括:
[0035]
计算推力矢量在本体系下投影l计算公式如下:
[0036][0037]
其中,c
fb
表示推力器相对卫星本体系的安装矩阵,α、β表示地面标定推力器偏差角度。
[0038]
优选地,所述模块m1.2包括:
[0039][0040]
其中,标称推力矢量在本体系下投影为[100];l为实际推力矢量在本体系的投影;l(1)表示推力矢量在本体系x轴上的投影。
[0041]
优选地,所述模块m1.3包括:
[0042][0043]
其中,q
bo
为修正前目标姿态;q
′
bo
表示修正后目标姿态。
[0044]
与现有技术相比,本发明具有如下的有益效果:
[0045]
1、本发明用于补偿航天器推力器的推力方向偏差,以提高变轨精度;
[0046]
2、本发明通过地面测得的发动机推力数据,计算推力偏差姿态修正参数,在深空探测器上实施姿态补偿。
[0047]
3、通过姿态补偿,修正深空探测器的推力方向偏差,提高变轨精度,同时减少燃料消耗,延长探测器寿命。
附图说明
[0048]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0049]
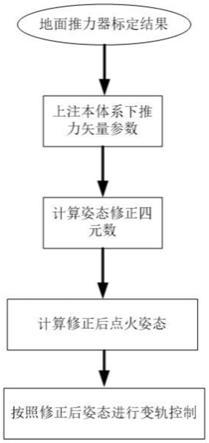
图1为本发明推力矢量偏差的器上姿态补偿方法的流程图。
[0050]
图2为本发明推力矢量偏差的器上姿态补偿原理示意图。
具体实施方式
[0051]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0052]
实施例1
[0053]
本发明提出一种深空探测器推力矢量偏差的器上姿态补偿方法,目的在于减少深空探测器轨控时推力方向的偏差,提升轨控精度,节约燃料消耗。
[0054]
根据本发明提供的一种深空探测器推力矢量偏差的器上姿态补偿方法,如图1-2所示,包括:
[0055]
步骤m1:根据地面的发动机推力方向标定的结果,计算轨控期间姿态补偿修正量;
[0056]
步骤m2:将轨控期间姿态补偿修正量上注到器上实施,补偿航天器推力器的推力方向偏差,以提高变轨精度。
[0057]
优选地,所述步骤m1包括:
[0058]
步骤m1.1:根据地面的发动机推力方向标定的结果,计算推力矢量在本体系下投影l,将该参数上注到器上,用于在轨推力矢量偏差的姿态补偿,推力矢量偏差的姿态补偿计算方法,在器上实施并实现;本体系是指与卫星固连的坐标系,坐标轴与卫星的构建布局关联。
[0059]
步骤m1.2:根据推力矢量在本体系下投影l,计算姿态修正四元数δq;
[0060]
步骤m1.3:根据姿态修正四元数δq,计算修正后的点火目标姿态,整器按照修正后姿态进行控制,以补偿推力方向偏差。
[0061]
优选地,所述步骤m1.1包括:
[0062]
计算推力矢量在本体系下投影l计算公式如下:
[0063][0064]
其中,c
fb
表示推力器相对卫星本体系的安装矩阵,α、β表示地面标定推力器偏差角度。
[0065]
本发明用于深空探测器,由于时延地面无法干预,在点火阶段姿态和加速度需同时解算、同时控制,因此需关注推力偏差。
[0066]
优选地,所述步骤m1.2包括:
[0067][0068]
其中,标称推力矢量在本体系下投影为[100];l为实际推力矢量在本体系的投影;l(1)表示推力矢量在本体系x轴上的投影。
[0069]
优选地,所述步骤m1.3包括:
[0070][0071]
其中,q
bo
为修正前目标姿态;q
′
bo
表示修正后目标姿态。
[0072]
将修正后的轨控目标姿态引入姿控系统进行闭环控制,补偿推力矢量偏差带来的轨控误差。
[0073]
根据本发明提供的一种深空探测器推力矢量偏差的器上姿态补偿系统,包括:
[0074]
模块m1:根据地面的发动机推力方向标定的结果,计算轨控期间姿态补偿修正量;
[0075]
模块m2:将轨控期间姿态补偿修正量上注到器上实施,补偿航天器推力器的推力方向偏差,以提高变轨精度。
[0076]
优选地,所述模块m1包括:
[0077]
模块m1.1:根据地面的发动机推力方向标定的结果,计算推力矢量在本体系下投影l,将该参数上注到器上,用于在轨推力矢量偏差的姿态补偿,推力矢量偏差的姿态补偿计算方法,在器上实施并实现;本体系是指与卫星固连的坐标系,坐标轴与卫星的构建布局关联。
[0078]
模块m1.2:根据推力矢量在本体系下投影l,计算姿态修正四元数δq;
[0079]
模块m1.3:根据姿态修正四元数δq,计算修正后的点火目标姿态,整器按照修正后姿态进行控制,以补偿推力方向偏差。
[0080]
优选地,所述模块m1.1包括:
[0081]
计算推力矢量在本体系下投影l计算公式如下:
[0082][0083]
其中,c
fb
表示推力器相对卫星本体系的安装矩阵,α、β表示地面标定推力器偏差角度。
[0084]
本发明用于深空探测器,由于时延地面无法干预,在点火阶段姿态和加速度需同时解算、同时控制,因此需关注推力偏差。
[0085]
优选地,所述模块m1.2包括:
[0086][0087]
其中,标称推力矢量在本体系下投影为[100];l为实际推力矢量在本体系的投影;l(1)表示推力矢量在本体系x轴上的投影。
[0088]
优选地,所述模块m1.3包括:
[0089][0090]
其中,q
bo
为修正前目标姿态;q
′
bo
表示修正后目标姿态。
[0091]
将修正后的轨控目标姿态引入姿控系统进行闭环控制,补偿推力矢量偏差带来的轨控误差。
[0092]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结
构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0093]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1