一种用于无人机测绘的摄像头固定组件的制作方法
1.本发明属于无人机测绘技术领域,更具体地说,特别涉及一种用于无人机测绘的摄像头固定组件。
背景技术:
2.无人机航测系统是一种用于地球科学、测绘科学技术、航空、航天科学技术领域的科学仪器,无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等方面具有广阔前景;而无人机在对地面进行测绘时需要用到摄像头进行拍摄进而完成测绘工作。
3.例如申请号:cn201811544025.2本发明公开了一种测绘巡检固定翼垂直起降无人机,涉及无人机技术领域,该测绘巡检固定翼垂直起降无人机包括无人机本体,空心壳体内装有可流动的介质,空心壳体的表面铰接有筒体,筒体的端部插入有移动杆,且移动杆与筒体的内壁滑动动态密封连接,移动杆的另一端与摄像头铰接,所述筒体靠近空心壳体的一端固定接通有软管,软管的另一端与空心壳体的内部接通;移动杆具有伸缩至筒体内的趋势或者移动杆具有伸出筒体的趋势,此时都需要克服可流动的介质流动的阻尼力,因此在克服此过程的时候,对摄像头的惯性力的作用已经减弱了很多,此时摄像头只需要发生轻微的晃动即可克服惯性力的作用,进一步的提高了摄像头的平稳能力,提高画面拍摄的流畅性。
4.基于上述专利的检索,以及结合现有技术中的设备发现,上述设备在应用时,虽然可以进行对无人机的晃动克服,但在实际应用过程中存在着无法对摄像头进行有效的固定操作,因此难以保证对摄像头进行测绘时的稳定性,再者是在对摄像头进行固定完成后无法对摄像头进行有效的保护操作,因此在当无人机起降及不慎发生撞击时会导致摄像头出现损坏。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种用于无人机测绘的摄像头固定组件,以解决现有的摄像头测绘固定组件在实际应用过程中存在着无法对摄像头进行有效的固定操作,因此难以保证对摄像头进行测绘时的稳定性,再者是在对摄像头进行固定完成后无法对摄像头进行有效的保护操作,因此在当无人机起降及不慎发生撞击时会导致摄像头出现损坏的问题。
6.本发明一种用于无人机测绘的摄像头固定组件的目的与功效,由以下具体技术手段所达成:一种用于无人机测绘的摄像头固定组件,包括防护机构、内衬机构和调节机构,所述防护机构共设有两处,且两处防护机构分别安装在固定机构的底端面前后两侧位置;所述内衬机构滑动连接在固定机构的内侧位置,且内衬机构的内部安装有夹紧机构;所述调
节机构安装在夹紧机构的底端位置;所述调节机构包括有丝杆a、导块和螺块a,所述丝杆a的外侧套接有导块,所述螺块a啮合传动在丝杆a的外侧位置。
7.进一步的,所述固定机构包括有保护箱、固定板和导向槽,所述固定板共设有两处,且两处固定板分别固定连接在保护箱的左右两侧面的顶端位置,所述导向槽呈矩形开设在保护箱的内壁上位置;进一步的,所述防护机构包括有支腿、避震器和护栏,所述支腿为u形结构设计,且支腿共设有两处,并且两处支腿的顶端面均安装有避震器,所述护栏共设有四处,其中每两处护栏为一组,且两组护栏分别固定连接在两处支腿的左右两侧面位置,安装状态下两处支腿分别通过避震器安装在保护箱底端面的前后两侧位置;进一步的,所述夹紧机构包括有主块和延伸块,所述主块为l形结构设计,且主块内部为中空结构设计,并设有四处,并且四处主块呈环形阵列设置,其中每两处相邻的主块的内部均安装有延伸块;进一步的,所述夹紧机构还包括有导向轮a和摄像头,所述导向轮a共设有八处,其中每两处导向轮a为一组,且四组导向轮a分别安装在四处主块的外侧面位置,所述摄像头夹紧在主块和延伸块的内侧位置,安装状态下主块通过导向轮a滑动连接在导轨a和导轨b的内侧位置;进一步的,所述内衬机构包括有导轨a、导轨b、导向轮b和滑槽,所述导轨a共设有两处,且两处导轨a的内部均开设有通槽,并且两处导轨a的内部均滑动连接有导轨b,所述导轨a和导轨b的内侧均开设有滑槽,所述导向轮b分别安装在导轨a和导轨b外侧两端位置,安装状态下导轨a和导轨b通过导向轮b滑动连接在保护箱内部所开设的导向槽的内侧位置;进一步的,所述调节机构还包括有锥齿轮组、丝杆b和螺块b,所述锥齿轮组安装在丝杆a的后侧位置,且锥齿轮组的左侧安装有丝杆b,并且丝杆b的外侧啮合传动有螺块b,安装状态下螺块a和螺块b分别安装在纵向及横向的主块的底端位置。
8.与现有技术相比,本发明具有如下有益效果:本发明中,由于主块内部为中空结构设计,并设有四处,并且四处主块呈环形阵列设置,其中每两处相邻的主块的内部均安装有延伸块,因此在当摄像头插入到主块和延伸块的内侧后可通过手动转动调节机构中的丝杆a,且由于丝杆a通过导块固定连接在主块的底端面位置,因此可通过丝杆a转动时带动起后侧所安装的锥齿轮组的啮合传动带动丝杆b进行同步转动,当丝杆a和丝杆b转动时通过分别与螺块a和螺块b之间的啮合传动带动主块将延伸块扯出根据摄像头的大小进行快速调整,该设计可根据摄像头的规格不同做出快速调整,以达到更加实用的目的;另一方面,由于在防护机构中的支腿共设有两处,并且两处支腿的顶端面均安装有避震器,护栏共设有四处,其中每两处护栏为一组,且两组护栏分别固定连接在两处支腿的左右两侧面位置,因此在当无人机不慎坠落时或撞击到其他物体时可对摄像头起到良好的减震保护操作,进而可达到延长摄像头使用寿命的目的。
附图说明
9.图1是本发明的侧视结构示意图。
10.图2是本发明的仰视结构示意图。
11.图3是本发明的仰侧视结构示意图。
12.图4是本发明的主视结构示意图。
13.图5是本发明的左视结构示意图。
14.图6是本发明的俯视结构示意图。
15.图7是本发明的内衬机构结构示意图。
16.图8是本发明的图2中a处放大结构示意图。
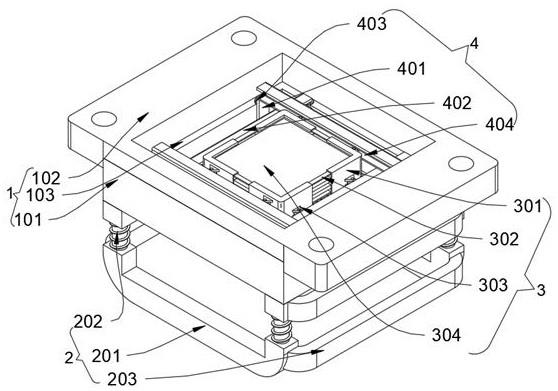
17.图中,部件名称与附图编号的对应关系为:1、固定机构;101、保护箱;102、固定板;103、导向槽;2、防护机构;201、支腿;202、避震器;203、护栏;3、夹紧机构;301、主块;302、延伸块;303、导向轮a;304、摄像头;4、内衬机构;401、导轨a;402、导轨b;403、导向轮b;404、滑槽;5、调节机构;501、丝杆a;502、导块;503、螺块a;504、锥齿轮组;505、丝杆b;506、螺块b。
具体实施方式
18.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
19.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
20.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
21.实施例:如附图1至附图8所示:本发明提供一种用于无人机测绘的摄像头固定组件,包括有:防护机构2、内衬机构4和调节机构5,防护机构2共设有两处,且两处防护机构2分别安装在固定机构1的底端面前后两侧位置;内衬机构4滑动连接在固定机构1的内侧位置,且内衬机构4的内部安装有夹紧机构3;调节机构5安装在夹紧机构3的底端位置;调节机构5包括有丝杆a501、导块502和螺块a503,丝杆a501的外侧套接有导块502,螺块a503啮合传动在丝杆a501的外侧位置。
22.其中,固定机构1包括有保护箱101、固定板102和导向槽103,固定板102共设有两处,且两处固定板102分别固定连接在保护箱101的左右两侧面的顶端位置,导向槽103呈矩形开设在保护箱101的内壁上位置。
23.其中,防护机构2包括有支腿201、避震器202和护栏203,支腿201为u形结构设计,且支腿201共设有两处,并且两处支腿201的顶端面均安装有避震器202,护栏203共设有四处,其中每两处护栏203为一组,且两组护栏203分别固定连接在两处支腿201的左右两侧面
位置,安装状态下两处支腿201分别通过避震器202安装在保护箱101底端面的前后两侧位置。
24.其中,夹紧机构3包括有主块301和延伸块302,主块301为l形结构设计,且主块301内部为中空结构设计,并设有四处,并且四处主块301呈环形阵列设置,其中每两处相邻的主块301的内部均安装有延伸块302。
25.其中,夹紧机构3还包括有导向轮a303和摄像头304,导向轮a303共设有八处,其中每两处导向轮a303为一组,且四组导向轮a303分别安装在四处主块301的外侧面位置,摄像头304夹紧在主块301和延伸块302的内侧位置,安装状态下主块301通过导向轮a303滑动连接在导轨a401和导轨b402的内侧位置。
26.其中,内衬机构4包括有导轨a401、导轨b402、导向轮b403和滑槽404,导轨a401共设有两处,且两处导轨a401的内部均开设有通槽,并且两处导轨a401的内部均滑动连接有导轨b402,导轨a401和导轨b402的内侧均开设有滑槽404,导向轮b403分别安装在导轨a401和导轨b402外侧两端位置,安装状态下导轨a401和导轨b402通过导向轮b403滑动连接在保护箱101内部所开设的导向槽103的内侧位置。
27.其中,调节机构5还包括有锥齿轮组504、丝杆b505和螺块b506,锥齿轮组504安装在丝杆a501的后侧位置,且锥齿轮组504的左侧安装有丝杆b505,并且丝杆b505的外侧啮合传动有螺块b506,安装状态下螺块a503和螺块b506分别安装在纵向及横向的主块301的底端位置。
28.使用时:先将夹紧机构3中的摄像头304插入到夹紧机构3中主块301及延伸块302的内侧位置,并且由于主块301内部为中空结构设计,并设有四处,并且四处主块301呈环形阵列设置,其中每两处相邻的主块301的内部均安装有延伸块302,因此在当摄像头304插入到主块301和延伸块302的内侧后可通过手动转动调节机构5中的丝杆a501,且由于丝杆a501通过导块502固定连接在主块301的底端面位置,因此可通过丝杆a501转动时带动起后侧所安装的锥齿轮组504的啮合传动带动丝杆b505进行同步转动,当丝杆a501和丝杆b505转动时通过分别与螺块a503和螺块b506之间的啮合传动带动主块301将延伸块302扯出根据摄像头304的大小进行快速调整,该设计可根据摄像头304的规格不同做出快速调整,以达到更加实用的目的;另一方面,在夹紧机构3中的主块301为通过导向轮a303沿着内衬机构4中的导轨a401和导轨b402滑动设计,因此可在加强对摄像头304保护的同时使得夹紧机构3在调整时可更加平稳,由于在防护机构2中的支腿201共设有两处,并且两处支腿201的顶端面均安装有避震器202,护栏203共设有四处,其中每两处护栏203为一组,且两组护栏203分别固定连接在两处支腿201的左右两侧面位置,因此在当无人机不慎坠落时或撞击到其他物体时可对摄像头304起到良好的减震保护操作,进而可达到延长摄像头304使用寿命的目的。
29.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1