基于机械压缩式变体积控高的浮空器及其定高方法
1.本发明属于浮空器技术领域,特别是涉及一种基于机械压缩式变体积控高的浮空器及其定高方法。
背景技术:
2.高空气球是一种无动力推进装置,无系留绳约束,仅仅在浮力和风力的作用下自由漂浮的浮空器,具有飞行高度高,滞空时间长,成本低等优点。
3.高空气球由于飞行高度较高,空气稀薄,螺旋桨所能提供动力有限,因此一般采用无动力随风漂浮。一般利用临近空间存在的准零分层,以及在准零风层附近,东风带和西风带之间存在空间范围较大、时间上比较稳定的纬向风转换层的这一特点。通过改变高度来利用不同风向的风层,能以较小的能量消耗实现对高空气球的轨迹控制,从而实现一定程度上的区域驻留或机动飞行。
4.高空气球主要有抛压舱物/放气、副气囊调节、改变体积三种高度调节方式。通过抛压舱物/排放浮升气体调节高空气球的高度的方法需要消耗压舱物和浮升气体的质量,而在高空中无法进行补充,因此调节次数有限,无法长时间工作。副气囊调节的方法需要空气压缩机对副气囊泵入超压空气,然而在高空空气稀薄的情况下会使得空气压缩机的效率大幅下降,能耗大幅提高。改变体积的调节方式通过改变浮力大小从而调节高度,理论上调节高度的次数没有限制,目前改变体积的高度调节方式采用可变形的刚性骨架控制高空气球的体积变化,这种调节方式容易造成气囊的应力集中、易出现不必要的磨损,可靠性差,并且调节过程持续不间断,体积一次变化到位,产生大量的热,对气囊蒙皮要求过高。
技术实现要素:
5.本发明的目的在于针对现有技术的不足之处,提供一种减少变体积时磨损和应力集中的基于机械压缩式变体积控高的浮空器及其定高方法。
6.本发明提供的这种浮空器,它包括气囊、调径装置和载荷仓;调径装置包括牵引绳和收放机构,调径装置设置于气囊轴向中心,牵引绳的上端绕过收放机构后与气囊的顶部相连、下端绕过收放机构后与气囊的底部相连;载荷舱通过连接绳系于气囊下。
7.所述气囊为南瓜形气囊,包括沿周向依次布置的多块气囊瓣。
8.所述气囊瓣为欧拉弹性等半径囊瓣或欧拉弹性等角度囊瓣。
9.所述收放机构包括电源、电机、传动机构和卷筒;电源向电机提供动力,电机的输出轴与传动机构的输入端相连,传动机构的输出动力驱动卷筒转动。
10.所述电机为步进电机,所述传动机构包括输入齿轮、传动齿轮、蜗杆和涡轮;输入齿轮的齿轮轴与电机的输出轴相连,输入齿轮的齿圈与传动齿轮的齿圈啮合,传动齿轮与蜗杆固接,蜗杆与涡轮啮合,涡轮与卷筒同轴固接。
11.所述电源为蓄电池;所述气囊与所述载荷仓之间的连接绳上系有太阳能电池板,太阳能电池板向电源充电。
12.所述牵引绳通过连接法兰与所述气囊相连。
13.所述气囊的内外囊壁上分别设有压力传感器;所述气囊的顶部设有安全阀。
14.本发明还提供了一种浮空器的定高方法,包括如下步骤:
15.s.1、确定目标高度h0;
16.s.2、根据目标高度确定该处外部大气压强p0;
17.s.3、放飞浮空器,将浮空器当前外部传感器的压力值p与p0对比,
18.s.3.1、若p小于p0,调径装置工作,对拉牵引绳,气囊体积压缩,浮空器下行,下行后悬停,此时气囊外部传感器的压力值为p1,
19.若p1小于p0,则继续对拉牵引绳,压缩气囊体积,
20.重复该步,逐级分步调节,直至p
i
‑
p0小于等于10pa,
21.s.3.2、若p大于p0,调径装置工作,松放牵引绳,气囊体积膨胀,浮空器上行,上行后,气囊外部传感器的压力值为p1,
22.若p1大于p0,则继续松放牵引绳,气囊体积膨胀,
23.重复该步,逐级分步调节,直至气囊外部传感器的压力值与p0之间的压差在10pa内。
24.在所述步骤s.3中,若气囊内外压差过大,则通过气囊顶部的安全阀排气降压。
25.本发明在投入使用后通过调径装置调节气囊的体积。调节时,需减小体积,则收放机构张紧牵引绳,对拉气囊即可。需增大体积,则控制收放机构松放牵引绳,膨胀气囊即可。调节过程中气囊磨损小,也能避免应力集中,可进行无限次数的体积调节,调节过程中,可逐级分步调节,避免一次调节到位所产生的大量热量,降低对于气囊蒙皮的要求,也利于保证浮空器的可靠性和寿命。
附图说明
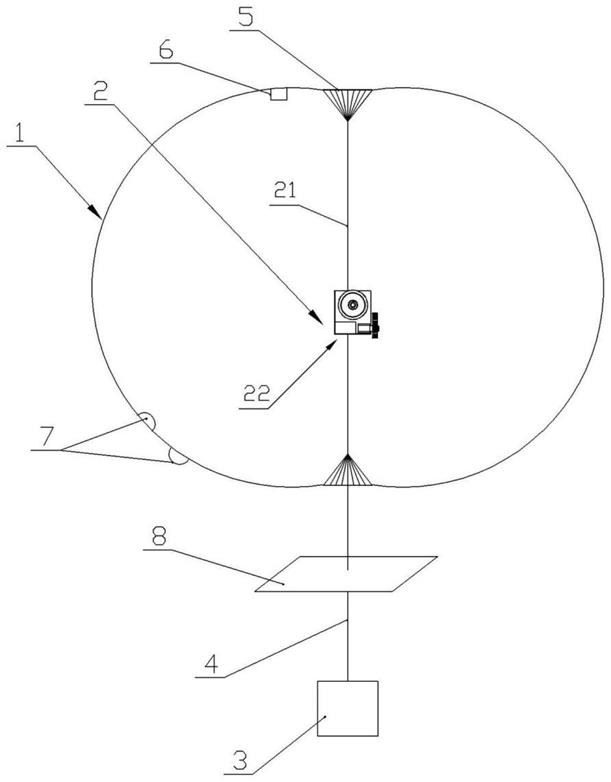
26.图1为本发明一个优选实施例的结构示意图。
27.图2为本优选实施例中气囊的立体放大示意图。
28.图3为本优选实施例中气囊瓣的立体放大示意图。
29.图4为图3中气囊瓣的各处截面的放大示意图。
30.图5为本优选实施例中调径装置的立体放大示意图。
31.图6为本优选实施例的变体积过程示意图。
32.图示序号:
33.1—气囊,11—气囊瓣;
34.2—调径装置,
35.21—牵引绳,
36.22—收放机构、221—电源、222—电机、223—传动机构、224—卷筒;
37.3—载荷仓;
38.4—连接绳;
39.5—连接法兰;
40.6—安全阀;
41.7—压力传感器;
42.8—太阳能电池板。
具体实施方式
43.如图1所示,本实施例公开的这种浮空器包括气囊1、调径装置2和载荷仓3。调径装置设置于气囊轴向中心;载荷舱通过连接绳4系于气囊下,位于气囊中央正下方,将重力同时作用于南瓜球的上下两端,以改善气囊作用力的分布情况。
44.如图2所示,气囊1为南瓜形气囊,由沿周向依次布置的多块气囊瓣11连接而成。如图3、图4所示,气囊瓣11选用欧拉弹性等半径囊瓣,即气囊瓣11长度方向各点的截面半径相等。各气囊瓣采用搭接的方式连接在一起,即将囊瓣连接处小部分重叠搭接,并用高频热融接手段,采用专用接膜带和胶合剂将连接处熔接在一起。
45.欧拉球体是由欧拉母线绕中轴旋转生成的封闭球体(母线方程g.i.tay l or于1919年研究降落伞时根据环向应力为零的假设推导出来的)欧拉体在超压状态下,环向应力为零,赤道平面处经向应力最小,球顶和球底出现了应力奇点。可通过改变球膜结构,把每幅球膜做成鼓包形成南瓜形状,这样改变了球膜结构的局部曲率半径同样可以减小球膜应力,提升承压能力。
46.欧拉弹性等半径、等角度囊瓣结构就属于通过减小囊瓣的局部曲率半径,以达到减少蒙皮应力,提高承载能力的设计方法。
47.如图4所示,等半径囊瓣的结构在不同角度的截面上,囊瓣的半径相等;等角度囊瓣的结构在不同角度的截面上,囊瓣的半径相等。
48.蒙皮的连接,按连接处蒙皮的位置布置一般可分为:对接、搭接和错接三种;按密封的方式一般可分为:热熔接和胶粘两种。
49.各气囊瓣采用搭接的方式连接在一起,即将囊瓣连接处小部分重叠搭接,并用高频热融接手段,采用专用接膜带和胶合剂将连接处熔接在一起。
50.在上下两法兰盘之间涂抹专用的胶合剂,将各膜瓣尾端置于两法兰盘之间,再用螺栓紧固连接法兰5用以安装调径装置2。在气囊的顶部设置安全阀6,当内外压差达到限定值时打开安全阀放气降压,以避免球体由于压差过高造成破坏。在气囊囊壁的内侧和外侧均安装压力传感器7,用以测算气囊的内外压差的大小,根据所测得压力值调整调径装置的工作状态。
51.如图1、图5所示,调径装置2由牵引绳21、收放机构22和外壳23三部分。收放机构22置于外壳内,收放机构由电源221、电机222、传动机构223和卷筒224。电源221为蓄电池。电机222选用步进电机。传动机构223带有自锁功能,由输入齿轮、传动齿轮、蜗杆和涡轮构成;输入齿轮的齿轮轴与电机的输出轴相连,输入齿轮的齿圈与传动齿轮的齿圈啮合,传动齿轮与蜗杆固接,蜗杆与涡轮啮合,涡轮与卷筒224同轴固接。牵引绳21的上端与上部的连接法兰连接、下段绕于卷筒上后与下部的连接法兰相连。并在气囊与载荷仓之间的连接绳上系有太阳能电池板8,用以向蓄电池充电。调径装置工作时,电机输出动力,传动机构将动力传递至卷筒,卷筒转动以实现收放牵引绳。
52.本浮空器在投入使用时。
53.先选定目标高度,记为h0。
54.其次根据目标高度确定该处外部大气压强p0。
55.接着放飞浮空器,将浮空器当前外部传感器的压力值p与p0对比。
56.若p小于p0,调径装置工作,对拉牵引绳,气囊体积压缩,浮空器下行,下行后悬停,此时气囊外部传感器的压力值为p1,下行过程中调径装置工作,张紧牵引绳,布置在球体内外的传感器压力值之差逐渐上升至限定值δp
max
,球体体积压缩高度下降至h1,对应外部大气压强为p1,随着外部气压减少,内外压差δp也随着降低;产生的热量也在下降过程中散掉;
57.若p1小于p0,则继续对拉牵引绳,压缩气囊体积,
58.重复该步,逐级分步调节,直至p
i
‑
p0小于等于10pa,分多次下降,从而下降至目标高度,如图6所示。
59.若p大于p0,调径装置工作,松放牵引绳,气囊体积膨胀,浮空器上行,上行后,气囊外部传感器的压力值为p1,
60.若p1大于p0,则继续松放牵引绳,气囊体积膨胀,
61.重复该步,逐级分步调节,直至气囊外部传感器的压力值与p0之间的压差在10pa内。
62.在调整过程中如果气囊内外压差过大,则通过气囊顶部的安全阀排气降压。
63.本浮空器在投入使用时,还可以根据目标高度对应的大气密度ρ,得出目标高度所需要体积v,调节拉伸装置释放相应的牵引绳长度。球体变成零压球缓慢上升,至目标高度h0。
64.本实施例在投入使用后通过调径装置调节气囊的体积。调节时,需减小体积,则收放机构张紧牵引绳,对拉气囊即可。需增大体积,则控制收放机构松放牵引绳,膨胀气囊即可。在变体积的过程中避免了摩擦以及应力集中的产生;可逐级分步调节,避免一次调节到位所产生的大量热量,降低对于气囊蒙皮的要求,也克服了气囊内外压差过大,造成的气囊蒙皮应力过大的问题,提高了浮空器的可靠性和寿命。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1