针对规模化种植农作物的无人机精准喷药系统
1.本发明涉及一种喷药系统,尤其是一种无人机喷药系统,属于植保无人机技术领域。
背景技术:
2.近年来,随着城乡一体化和耕地流转的加快,规模化种植业逐渐发展起来,出现了较多千亩以上规模化种植的果树和其他农作物。与普通农户种植相比,规模化种植面积大,设施完善,能够降低人工成本,提高作业效率,也对农业机械提出了新的需求。
3.在农业植保领域,为了提高作业效率,降低成本,目前已经采用机器人和无人机进行农药喷洒。申请号为201710420084.8的发明专利公开了一种基于自走式多自由度平台的仿无人机农业喷药作业平台,包括自走车体、储药箱及农药喷施平台;自走车体的载物台上安装竖直伸缩杆和水平伸缩杆;农药喷施平台设置在水平伸缩杆的端部,设有开口向下的喷头,实现精准施药;通过旋转基座、水平和竖直伸缩进行调节,以适应不同高度的作物或不同宽度的作物田地。申请号为201910050596.9的发明专利公开了一种农业种植用无人机喷药系统,包括主控系统,所述主控系统连接端分别设有无人机和自动驾驶汽车,所述主控系统通过控制线缆分别连接加药机和蓄电池组;在自动驾驶汽车顶部设置加药机和蓄电池组,无人机电源用完或农药喷洒完后可以返回至自动驾驶汽车顶部的停车坪,主控系统控制加药机给无人机添加农药,也可为无人机的蓄电池充电,提高工作效率。
4.采用无人机喷药,携带的农药量一般在10~30kg;在电量不足或农药用完时,需要返回加药或充电,也可更换药箱或电池。自走式农药喷洒机器人能够克服无人机的载重小、续航时间短、安全性和稳定性不足的问题,安全可靠,电量和药量充足,能够精准施药;但是,与无人机相比,需要在地面上移动;会伤害农作物,也会因地面的不确定性障碍物受阻;明显存在技术矛盾。为了解决此技术矛盾,提高作业效率,出现了系留无人机。申请号为201610157939.8的发明专利公开了一种无人机供液供电系统,包括地面供电装置、地面供液装置、系缆及无人机;无需在无人机上增加储液箱及储油箱,减轻无人机的载重,使得能耗大大降低。申请号为201610082275.3的发明专利公开了一种系留无人旋翼飞行器集群平台系统及液体连续喷洒系统,包括移动系留平台、电源系统、系揽、多个无人旋翼飞行器、中央控制系统和液体连续喷洒系统;系缆为多个无人旋翼飞行器提供电能;系缆在空中形成空间三维折线,从而躲避或绕过障碍物,能适应地形变化,增加系留无人旋翼飞行器及所携带载荷的空间范围,提高作业效率。规模化种植面积剧增,使得此技术矛盾加剧;系留无人机的地面移动单元,在载重较大时,必然增大体积,影响在田地中的移动,难以达到整体最优。
5.目前,系留无人机技术已经得到了应用和发展。申请号为201920405631.x的实用新型专利公开了一种适用于系留无人机的起降平台,包括车载固定台、中间调节台和无人机起降台;结构简单可靠,可实时保持水平自稳,实现安全无损起降。申请号为201911216988.4的发明专利公开了一种系留无人机及无人机机载端,包括机体和连接于机
体的多个机臂,机臂连接旋翼;通过将机臂设置两段式结构,调节臂体之间的相对位置和总长度,实现无人机机载端的变轴距设计,可根据不同风力环境调整所需轴距,增强无人机的稳定性。申请号为201910025889.1的发明专利公开了一种系留无人机精确降落控制系统及方法,包括系留缆、张力传感器、系留收线电机、控制电路、飞行控制模块和激光高度计,利用线缆拉力控制、飞行控制模块以及实时控制技术,实现系留无人机在小平台上的高精度降落;减小起降平台面积,提高了可靠性和安全性。
6.系留无人机与地面移动单元通过系留缆连接,系留缆会松弛、打结、张紧和崩断,影响飞行姿态,会引发安全事故,造成摔机。田野中有树木、灌木、电线、杆塔、建筑物等障碍物,也有湖、河、丘岗、陡坡和碑石等危险因素,加上不确定的阵风,影响飞行安全,尤其是在系留无人机的起飞和降落过程。另外,无人机的起降过程引发剧烈的近地空气流动,会扬起灰尘、砂石和枝叶,引起污染和伤害,降低使用寿命;也会加剧喷洒农药的飘移,易伤害人畜和其他农作物,带来安全风险;需要进一步研究改进。
7.随着物联网、云计算、人工智能和大数据等新一代信息技术的发展和应用,目前出现了数字农业系统。申请号为201910528344.2的发明专利公开了一种基于互联网的农业信息化产业化系统,包括信息采集模块、种植管理模块、智慧管理模块、信息展示模块和农产品供应链模块;通过云端服务器,对数据进行识别及存储,有效监测农业信息并实时反馈,通过互联网实现供应链模式的有效产业化。申请号为201810983208.8的发明专利公开了一种智慧果园种植管理系统,实现快速、多维、多尺度的果园信息实时监测,基于深度学习为果树构建生长模型,使用vr/ar立体模型、图表和曲线直观动态显示,利用大数据、云计算、数据挖掘、人工智能、音视频技术使农业种植走向精准化,提供一套科学系统精确的农业智能化生产管理系统。申请号为201910899173.4的发明专利公开了一种田间全景图生成方法、装置、系统、服务器及存储介质,可以实时生成高质量、高分辨的田间全景图,给田间病虫害检测、农作物长势检测、田间作物识别、农药喷施提供重要图像数据来源,对田间农情精准化管理提供数据保障。申请号为202010523956.5的发明专利公开了一种基于大数据物联网的智慧农业植保作业控制系统,包括区域图像采集模块、图像预处理模块、种植区域划分模块、农作物资源数据库、区域面积统计模块、区域植株密度分析模块、gps跟踪定位模块、无人机控制终端、数据管理服务器和作业高度检测模块,对各农作物种植子区域进行划分,对其农药喷洒量进行统计,进行有效地农药喷洒,提高植保工作技术水平。
8.目前,汽车自动驾驶和共享经济已经得到了快速发展和应用;在此背景下,针对规模化种植农作物的精准喷药作业,充分利用新一代信息技术,进一步提高作业效率,降低作业成本,并确保安全可靠,需要进一步研究改进。
技术实现要素:
9.本发明的目的在于提供一种针对规模化种植农作物的无人机精准喷药系统,改进无人机的结构和降落方式,确保安全可靠,并进一步提高作业效率,降低作业成本;充分利用新一代信息技术,实现整体最优;促进新一代信息技术、汽车自动驾驶和共享经济的发展和应用,提高智能化水平,促进无人化。本说明书所述的方位以进行喷药作业的无人机喷药系统为基准,作业行进方向为前,反之为后;前后方向为纵向;依此类推。本发明的具体技术方案如下。
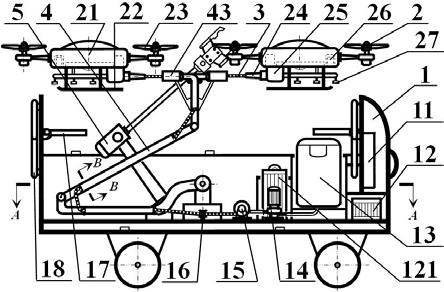
10.针对规模化种植农作物的无人机精准喷药系统,包含服务车、无人车1、无人机2和系留缆3;所述无人车1上安装臂架4和机械手5,如图1所示。所述服务车和无人车1都与数字农业系统无线通信,至少获取喷药作业任务、喷药区域信息、服务任务和水源信息,接收调度指令,并上传位置和状态信息。
11.所述服务车从所述数字农业系统接收服务任务和水源信息,自主决策为所述无人车1提供服务,并自主决策从水源取水,能够利用共享服务模式,充分利用闲散资源,提高效率,节约能源。所述无人车1携带一架或多架无人机2,并通过所述系留缆3为所述无人机2输送农药和电能,能够精准喷药,并最大化喷药作业效率。所述服务车、无人车1和无人机2,针对规模化种植农作物的精准喷药,在所述数字农业系统的统一管控和调度下,自主决策,规划路线和航线,并导航,能够达到整体最优。
12.所述系留缆3穿过所述臂架4,获得支撑和引导,使得所述无人车1与无人机2获得连接;所述系留缆3承受张力,控制并引导所述无人机2降落于所述臂架4,也能够从所述臂架4起飞;提高飞行与起降过程的安全性和可靠性,减轻起降过程对于近地空气的扰动和对农药飘移的影响,避免引起污染和伤害。
13.所述无人车1包含底盘、车头和车厢,带有控制箱11、固定电池12、电池护栏、可换电池121、药箱支架、药箱13、药泵14、收放线装置15、导轮16、支撑板17、连杆18和动厢板19,在所述底盘的下侧安装车轮,在所述底盘上侧的后部安装车厢,在所述底盘上侧的前部安装车头,在田地中沿着农作物的行间、田垄或田埂自主行走,也在田间道路上低速自动驾驶,能够自主避障和导航,不伤害农作物。所述低速自动驾驶的行驶速度优选不超过20km/h。所述底盘包含传动系、行驶系、转向系和制动系四部分。
14.所述车头为竖扁形的箱体结构,带有背板和底板,在内上部固定安装控制箱11,在内下部固定安装固定电池12,在前面和侧面安装雷达传感器、摄像头和车灯,以自动驾驶和主动避障。所述车厢为平扁形的箱体结构,包含底板、顶板、侧板、前端板和后端板,通过前端板与所述车头固定连接,并与所述车头共同安装于所述底盘的上侧,构成所述无人车1。
15.所述车厢在其底板上安装臂架4、机械手5、电池护栏、药箱支架、药泵14、收放线装置15和导轮16,通过所述电池护栏卡固可换电池121,通过所述药箱支架卡固药箱13,在其前端板和后端板的内侧通过弹簧铰链连接支撑板17,在其前端板的内侧和后端板的后侧安装连杆18,在其侧板通过铰链安装动厢板19,并通过所述连杆18与所述动厢板19铰接,驱动所述动厢板19相对所述车厢运动,以打开或关闭所述车厢。
16.所述控制箱11为竖扁形的箱体结构,安装于所述车头内上部的背板上,在其内部固定安装电路板。所述电路板至少包含卫星定位模块、图像处理模块、移动通信模块、无人机通信模块、环境感知模块、行为决策模块、执行模块、臂架监控模块、机械手监控模块、电源模块和总控模块,通过移动通信模块与手机和所述数字农业系统无线通信,从所述数字农业系统至少获取喷药作业任务、喷药区域信息和调度指令,并向数字农业系统上传位置数据、服务请求和状态信息,也使得注册账户能够通过手机监控喷药作业状态,并发布控制指令。
17.所述卫星定位模块获取卫星的位置和时间数据;所述图像处理模块对来自所述无人车1和无人机2摄像头的图像数据进行分类、变换和增强,并检索、匹配和识别获得决策所需的环境信息;所述移动通信模块无线连接移动通信网络,通过移动通信网络无线连接手
机和数字农业系统;所述无人机通信模块与系留缆3电连接,进行信号转换,使得所述无人车1与无人机2进行数据交换;所述环境感知模块对来自所述无人车1和无人机2的环境信息,进行变换、提取和融合,获得喷药作业、行驶和飞行需要的信息。所述环境信息包含来自所述图像处理模块获取的环境信息、来自雷达传感器的障碍物信息和来自所述数字农业系统的地理信息。所述行为决策模块依据来自所述无人车1和无人机2的环境信息、任务状态、飞行状态和行驶状态,进行决策,修正任务执行、飞行和行驶的参数,生成新的任务,改变所述无人车1和无人机2的行为;所述执行模块依据来自所述行为决策模块的针对所述无人车1的行为决策信息,产生任务执行的控制信息,产生对于油门、刹车、方向盘、车灯、药泵14、收放线装置15和连杆18的控制命令。
18.所述臂架监控模块获取所述臂架4的传感器和电机状态数据,产生针对电机的控制指令,使得所述臂架4产生旋转、升降和锁紧动作,锁紧或释放所述无人机2。所述升降至少包含伸出、缩进和折叠、展开。所述机械手监控模块获取所述机械手5的传感器和电机状态数据,产生针对机械手5的控制指令,使得所述机械手5夹持所述支撑板17,以收起或放平所述支撑板17,夹持所述无人机2的旋翼23和起落架22,折叠、打开或调节所述旋翼23,扶正失稳的无人机2,也能够扶正歪倒的无人车1,辅助所述无人车1的移动。
19.所述电源模块通过电线与所述固定电池12和可换电池121连接,也通过电线与系留缆3、臂架4、机械手5、药泵14、收放线装置15、连杆18、雷达传感器、摄像头、车灯和底盘的行驶系,进行自动切换和电压转换,至少为所述电路板的其他模块、臂架4、机械手5、药泵14、收放线装置15、连杆18、雷达传感器、摄像头、车灯和底盘的行驶系供电,实现为所述无人车1和无人机2供电。所述总控模块包含微处理器和存储器,与所述电路板的其他模块通信,进行任务调度,至少存储图像数据、决策数据、任务数据和日志。
20.所述固定电池12固定安装在所述车头内的底板上,位于所述车头的内下部,以降低重心;通过电线与所述控制箱11的电源模块连接,作为备用电源为所述无人车1和无人机2供电。所述可换电池121通过所述电池护栏,依靠其重力卡固在所述车厢的底板上,位于所述车厢的前部,以确保重心稳定;能够被工具或手爪夹紧、提起和放下,便于快速更换;通过电线与所述控制箱11的电源模块连接,作为主电源为所述无人车1和无人机2供电。所述电池护栏为封闭的围栏形结构,固定安装在所述车厢的底板上,顶部开放,以卡固所述可换电池121,便于所述可换电池121的取放和更换。
21.所述药箱13为长方形的容器,容纳农药;通过所述药箱支架,依靠其重力,卡固在所述车厢的底板上,位于所述车厢的前部,以确保重心稳定;能够被工具或手爪夹紧、提起和放下,便于快速更换;在底部通过管道与所述药泵14连接,经过所述系留缆3为所述无人机2输送农药,进行精准喷药。所述药箱支架为顶部开放的框架形结构,固定安装在所述车厢的底板上,以卡固所述药箱13,便于所述药箱13的取放和更换;在其下部预留足够的空间,以便于管道经过。
22.所述药泵14带有电机,固定安装在所述车厢底板的前部,靠近所述药箱13,以确保重心稳定;通过管道分别与所述药箱13和收放线装置15连接,从所述药箱13抽取农药,经过系留缆3为所述无人机2输送农药,进行精准喷药。
23.所述收放线装置15至少包含卷筒、电机和底座,通过其底座固定安装在所述车厢底板的前部,靠近所述药泵14,以确保重心稳定;通过其卷筒卷绕所述系留缆3,在所述控制
箱11的控制下,收放所述系留缆3,控制所述系留缆3的松弛和张紧程度,避免打结和崩断,也通过张紧所述系留缆3,控制并引导所述无人机2降落于所述臂架4。
24.所述导轮16由互相靠近的两个滑轮组成,固定安装在所述车厢底板的中部,夹持所述系留缆3,改变所述系留缆3的运动方向,避免所述系留缆3与所述臂架4发生运动干涉。
25.所述支撑板17为带有曲面的板形结构,通过所述曲面贴合并支撑所述无人机2,使得所述无人机2能够安全收放于所述车厢的内部,避免在无人车1的运输和行驶时相对所述车厢振动和晃动,避免碰撞和损坏;所述支撑板17通过弹簧铰链安装在所述车厢的前端板和后端板的内侧,能够被所述机械手5夹持,实现收起和放平的操作,避免与所述机械手5的运动和所述药箱13的取放发生干涉。
26.所述连杆18为平面四杆结构,带有电机,安装在所述车厢前端板的内侧和后端板的后侧,与所述动厢板19铰接,通过所述电机驱动所述动厢板19相对所述车厢运动,以打开或关闭所述车厢。
27.所述动厢板19包含动顶板191和动侧板192;所述动顶板191和动侧板192都为长方形的平板结构,如图2所示。在所述车厢的打开状态,即图2所示的位置,所述动顶板191在前后两端的上部通过铰链与所述连杆18铰接,在下沿通过铰链与所述动侧板192的下沿铰接,所述动侧板192在上沿通过铰链与所述车厢的侧板铰接,使得所述连杆18能够驱动所述动顶板191,由图2的位置向上移动,带动动侧板192向上翻转,并向所述车厢顶部的中心移动,形成所述车厢的顶板,以关闭所述车厢;同样,也使得所述连杆18能够驱动所述动顶板191从关闭状态,到达图2的位置,打开车厢。
28.所述无人机2至少包含机身21、起落架22、旋翼23、插头24、基座25、备用电池26和喷头27,如图1所示,通过所述插头24与系留缆3连接,使得所述无人机2获得电源和农药,能够与所述无人车1通信,并精准喷药;也在所述系留缆3的控制和引导下,通过所述插头24插接于所述臂架4,使得所述无人机2安全降落于所述臂架4,也使得所述插头24与所述臂架4分离,使得所述无人机2从所述臂架4起飞;提高起降过程的安全性和可靠性,减轻起降过程对于近地空气的扰动和对农药飘移的影响,避免引起污染和伤害。
29.所述机身21为曲面箱体形结构,在外表面安装传感器和摄像头,在内部固定安装电池插槽、天线和主板,通过所述电池插槽插入并卡固所述备用电池26,与所述旋翼23铰接。所述电池插槽有两个,分别位于所述机身21的前部和后部。所述主板至少带有通信模块、控制模块、导航模块、数据处理模块和电源模块,使得所述无人机2与所述无人车1能够通信,并与遥控器无线通信,自主决策,规划飞行航线,并导航。
30.所述通信模块使得所述无人机2与所述无人车1能够通信,并与遥控器进行无线通信,接收调度指令,发送监控图像和其它信息。所述控制模块带有加速度计、陀螺仪和罗盘,控制旋翼23和喷头27,对飞行姿态和运动参数实时控制,也控制所述喷头27的打开和关闭,实现精准喷药。所述导航模块带有卫星定位模块,实时获得飞行航线信息。所述数据处理模块存储并处理来自所述无人车1的地理信息、飞行和行驶信息;也处理来自所述机身21摄像头和传感器的数据,自主决策,规划飞行航线。所述电源模块分别与所述系留缆3和备用电池26电连接,进行自动切换和电压转换,为所述主板的其他模块、传感器、摄像头和喷头27供电。
31.所述起落架22与所述机身21下表面的左右两侧固定连接,位于所述机身21下方所
述喷头27的左右两侧,能够保护所述喷头27,吸收所述无人机2在降落于地面时的冲击能量,使得所述无人机2能够安全降落于地面。在所述无人机2降落于所述臂架4时,如果所述无人机2失稳,所述起落架22能够被所述机械手5夹持,以扶正并辅助所述无人机2降落于所述臂架4,提高所述无人机2降落于所述臂架4的安全性和可靠性。
32.所述旋翼23为长条形结构,在远离所述机身21的一端带有飞行马达和桨叶,通过所述飞行马达驱动桨叶旋转,获得空气动力,产生飞行驱动力,使得所述无人机2能够起飞、飞行和降落,进行精准喷药。所述旋翼23在靠近所述机身21的一端与所述机身21铰接,使得所述无人机2在收放于所述无人车1的车厢前,所述旋翼23能够被所述机械手5夹持,折叠于所述机身21的左右两侧,也使得所述无人机2从所述臂架4起飞时,所述旋翼23能够被所述机械手5夹持,展开,并调节相对于所述机身21的位置和距离,减少所述无人机2的飞行控制难度,提高飞行稳定性。
33.所述插头24为长条形的非旋转体结构,在其中心带有沿着轴向的圆形通孔,在前端与所述基座25固定连接,通过所述通孔穿过所述系留缆3,并与所述系留缆3固定连接,使得所述收放线装置15能够通过张紧所述系留缆3,控制并引导所述无人机2降落于所述臂架4。所述插头24沿着轴向向后,横截面尺寸逐渐减小,呈现沿着轴向的楔形,在所述无人机2降落于所述臂架4时,能够插入所述臂架4,并具有引导作用,提高所述无人机2降落于所述臂架4的安全性和可靠性。
34.所述基座25为平扁形的箱体结构,在内部带有分接板,通过所述分接板使得所述系留缆3分别与所述机身21的主板和喷头27连接,在上表面与所述机身21后部的下表面可拆卸连接,位于所述机身21后部的下侧,在前后侧面都带有通孔;使得所述插头24穿过后侧面的所述通孔并获得固定,将所述插头24固定于所述机身21后部的下侧;使得所述喷头27穿过前侧面的所述通孔并获得固定,使得所述喷头27固定于所述机身21的下方,位于所述起落架22之间,获得保护,避免在所述无人机2降落于地面时,受到伤害。
35.所述备用电池26插入并卡固于所述机身21前部的电池插槽中,能够平衡位于所述机身21后部的所述插头24、基座25、系留缆3和农药的重量,使得所述旋翼23受力均衡而稳定,减少所述无人机2的飞行控制难度,提高飞行稳定性。
36.所述喷头27包含电磁阀、喷杆和喷嘴,通过所述电磁阀,并经过管件和分接板,连接所述系留缆3,使得所述喷嘴获得农药,进行精准喷药。所述电磁阀位于所述基座25的内部,在所述机身21主板的控制下,打开或关闭,实现精准喷药。所述喷杆为刚性弯管,一端连接所述电磁阀,另一端连接所述喷嘴,使得农药流过,为所述喷嘴提供农药,进行精准喷药。所述喷杆穿过并卡固于所述基座25前侧面的通孔,并通过管夹固定于所述机身21的下表面,获得支撑和固定。所述喷嘴带有喷孔,使得农药从所述喷孔喷出,并雾化,实现精准喷药。
37.所述系留缆3至少包含保护层、耐张力线、通信线缆、电力线缆和输液软管31,具有柔性,能够弯曲,承受张力,传输通信信号和电能,通过所述输液软管31输送农药,如图3所示。所述系留缆3在一端卷绕于所述收放线装置15的卷筒,在另一端与所述插头24固定连接,使得所述无人车1能够与所述无人机2进行通信,能够为所述无人机2输送电能和农药,也能够通过被张紧,控制并引导所述无人机2降落于所述无人车1的臂架4。
38.所述臂架4包含支座、支臂和支架,通过所述支座固定安装于所述车厢底板的中
央,带有传感器和电机,能够相对所述车厢旋转、升降和锁紧,通过其支臂和支架穿过所述系留缆3,以支撑并引导所述系留缆3,并通过所述系留缆3控制并引导所述无人机2起降。
39.进一步地,所述臂架4带有插座43,并在所述系留缆3的控制和引导下,使得所述无人机2的插头24插入所述插座43,并锁紧,使得所述无人机2能够降落于所述臂架4,也使得所述插头24与所述插座43分离,使得所述无人机2从所述臂架4起飞,确保安全可靠。
40.所述支臂和支架都带有空心结构,通过所述空心结构穿过所述系留缆3,以支撑并引导所述系留缆3,并在所述空心结构的两端优选带有压线轮,通过所述压线轮引导所述系留缆3的穿入和穿出,减少与所述系留缆3的摩擦力。在图1和图3所示的实施例中,所述支臂和支架都包含工字梁41和扣槽42,通过所述扣槽42的扣舌卡扣在所述工字梁41的卡槽中,形成所述空心结构,穿过所述系留缆3。在图1和图3所示的实施例中,所述支臂和支架都带有两个所述空心结构,穿过两根系留缆3。
41.所述支臂连接所述支座和支架,能够相对于所述车厢旋转和升降;所述升降至少包含伸出、缩进和折叠、展开。在图1所示的实施例中,所述支座能够相对于所述车厢旋转;所述支臂包含互相铰接的两段,也分别与所述支座和支架铰接,能够折叠与展开,使得所述臂架4能够展开,以控制并引导所述无人机2起降,也能够折叠,将所述无人机2收放于所述车厢内。
42.所述支架带有插座43。所述插座43为带有轴向通孔的杆状结构,一端与所述支架固定连接,在另一端为自由端,并在所述自由端,由于所述通孔的横向尺寸增大形成插孔,使得所述系留缆3穿过所述通孔和插孔,并穿出所述臂架4。
43.所述插孔为沿着轴向的内孔,其横截面为非旋转结构,沿着轴向在靠近所述插座43自由端的方向,其横向尺寸逐渐增加,呈现轴向楔形,与所述插头24的斜度相同,能够引导所述插头24插入,并与所述插头24配合,使得所述插头24能够插入所述插座43,并避免相对旋转,使得所述无人机2能够安全降落于所述臂架4。在图1和图4所示的实施例中,所述插孔的横截面为圆角菱形的非旋转结构;所述插孔在其末端带有触点开关431,在靠近其末端的内壁上带有锁舌432,使得所述无人车1的臂架监控模块能够通过所述触点开关431判断所述插头24的插入状态,判断所述无人机2的起飞和降落状态,也能够通过操作所述锁舌432,锁紧和释放所述无人机2的插头24。在图1所示的实施例中,所述支架带有两个插座43,穿过两根系留缆3,也包含两架无人机2。
44.所述机械手5安装于所述车厢底板的中部,带有传感器和电机,能够收放于所述车厢内,避免影响所述臂架4的运动和所述无人机2的起降;能够相对所述车厢运动,夹持所述支撑板17,以收起或放平所述支撑板17;夹持所述无人机2的旋翼23,折叠、打开并调节所述旋翼23;所述机械手5夹持所述无人机2的起落架22,扶正失稳的无人机2,辅助所述无人机2降落于所述臂架4;所述机械手5能够扶正歪倒的无人车1,辅助所述无人车1的移动。在图1和图2所示的实施例中,所述机械手5包含机座、大臂、小臂、手腕和手爪,通过所述机座固定安装在所述车厢底板的中部,通过所述手爪夹持所述支撑板17、无人机2的旋翼23和起落架22。
45.所述无人车1通过获取的环境信息、位置和时间数据、喷药区域信息,自主决策,规划所述无人车1的行驶路线和所述无人机2的飞行航线,生成导航数据,控制所述无人车1的行驶;所述无人机2通过与所述无人车1通信,获得飞行航线;所述无人机2自主决策,规划其
飞行航线,进行导航。所述无人车1的行驶路线与所述无人机2飞行航线的一个实施例,如图5所示。在图5中,一辆所述无人车1携带两架无人机2;所述无人车1在田地中沿着田埂63,或在田间道路上,沿着行驶路线61行驶,不伤害农作物;所述无人机2沿着飞行航线62飞行;所述无人车1及其携带的无人机2各自行驶和飞行,不必返回;所述行驶路线61和飞行航线62都优选s形,所述喷头27能够打开和关闭。因此,针对规模化种植的农作物,所述无人车1及其携带的无人机2,能够实现精准喷药,避免重喷和漏喷。
46.所述服务车携带可换电池121、药箱13、水箱、配药装置、农药商品和维修工具,安装服务软件,通过所述服务软件与所述数字农业系统和无人车1无线通信,从所述数字农业系统获取服务任务和水源信息,接收调度指令,并上传位置和状态信息;在田间道路和公共道路上行驶,自主决策为所述无人车1提供服务,并自主决策从水源取水;为所述无人车1更换其可换电池121和药箱13,提供维修保养服务,也能够载运所述无人车1、维修设备和维修人员。
47.所述水箱带有过滤器和水泵,能够从水源取水。所述水源优选湖、江和河,也可用自来水、井水和消防用水。所述配药装置包含药罐、搅拌器和药泵,用于调配农药,并灌装所述药箱13。所述农药商品是从市场购买的原装农药,稀释调配后才能喷洒。
48.所述数字农业系统为位于云端的软件系统,至少存储水源信息、地理信息与规模化种植农作物的图形图像和植保信息,存储所述无人车1、无人机2和服务车的信息,通过移动通信系统与所述无人车1和服务车实时通信,获取其地理位置和状态信息,也发送调度指令。
49.所述数字农业系统能够生成喷药作业任务、服务任务和喷药区域信息,并发送给所述无人车1,能够接收所述无人车1的服务申请,生成服务任务,并发送给所述服务车。所述服务任务至少包括更换可换电池121、更换药箱13、维修保养和载运任务。所述载运任务是指,所述服务车装载所述无人车1,并经过公共道路,运输到其他作业地点或存放地。所述无人车1处于载运状态时,将所述无人机2、臂架4和机械手5都收放于其车厢内,并关闭所述车厢。
50.补充说明:(1)所述服务车优选现有的厢式货车,载运一辆或多辆所述无人车1、维修设备和维修人员;优选无人自动驾驶,提高智能化水平,促进无人化。所述服务车在人工驾驶时,其服务软件也可安装于驾驶员的手机。
51.因此,本发明的所述服务车能够充分利用,社会闲散的货车和驾驶员资源,利用共享经济的共享服务模式,为合作社或服务者提供服务;所述无人车1和无人机2,也能够利用共享经济的共享服务模式,为规模化种植业的业主或服务者提供服务。所述服务者可以是农药销售商、植保服务企业、农机运营企业、喷药服务队或其他企业、团体和个人。
52.(2)所述服务车接收调度指令,并自主决策提供服务,自主决策从水源取水,能够利用共享服务模式,减少等待时间,行驶路线和时间最短,充分利用闲散资源,提高效率,节约能源,达到整体最优。所述无人车1能够携带一架或多架无人机2,并通过所述系留缆3为所述无人机2输送农药和电能,能够减轻所述无人机2的体积和载重,也能够增加续航时间,能够减少所述无人车1在田地中的行走距离,能够得到最优调配。因此,本发明的所述服务车、无人车1和无人机2构成的喷药系统,针对规模化种植的农作物,能够在所述数字农业系统的统一管控和调度下,自主决策,规划路线和航线,并导航,达到整体最优;即,能够最小
化等待时间,最大化服务效率,最少能源消耗,能够最优调配药箱13重量、可换电池121的电量和更换次数,也能够充分利用社会闲散资源,精准喷药,并最大化喷药作业效率。
53.(3)所述无人机2的备用电池26位于所述机身21前部的电池插槽中;所述基座25与所述机身21的下表面可拆卸连接;所述喷头27通过管夹固定于所述机身21的下表面;所述插头24在前端与所述基座25固定连接;所述旋翼23与所述机身21铰接,能够调节相对于所述机身21的位置和距离。因此,所述无人机2能够依据农作物高度,确定最佳的飞行高度和所述臂架4的最佳高度,实现精准喷药;在起飞前,合理调节所述旋翼23相对于所述机身21的位置和距离,使得所述插头24、基座25、系留缆3和农药的重量得到最佳平衡,减少所述无人机2的飞行控制难度,提高飞行稳定性。也能够将此调节数据,存入所述数字农业系统,形成位于云端的知识库,以辅助其他喷药作业的调节操作;充分利用大数据,实现智能决策,提高决策的精度和效率,降低决策难度。
54.(4)所述无人机2在降落于所述臂架4时,优选将所述臂架4上升到最大高度,增大所述系留缆3的张力,控制并引导所述无人机2沿着水平方向逐渐靠近所述臂架4;所述无人机2从所述臂架4起飞时,也优选将所述臂架4上升到最大高度,并减少所述系留缆3的张力;能够提高所述无人机2飞行与起降过程的安全性和可靠性,减轻起降过程对于近地空气的扰动和对农药飘移的影响,避免引起污染和伤害。
55.在起降过程中,如果所述无人机2意外失稳,由于所述臂架4上升到最大高度,能够提高所述无人机2通过所述系留缆3悬挂于所述臂架4的几率,因而能够降低摔机的几率,提高安全性。如果所述无人机2意外失稳,并通过所述系留缆3悬挂于所述臂架4,则所述机械手5可以夹持所述无人机2的起落架22,扶正失稳的无人机2,辅助所述无人机2降落于所述臂架4。因此,本发明能够提高所述无人机2起降过程的安全性和可靠性。
56.(5)所述机械手5安装于所述车厢底板的中部,能够相对所述车厢运动。由于田野中有树木、灌木、电线、杆塔、建筑物等障碍物,也有湖、河、丘岗、陡坡和碑石等危险因素;因此,所述无人车1在田地中沿着农作物的行间、田垄或田埂自主行走时,会发生歪倒或移动困难。此时,所述臂架4和机械手5相对所述无人车1的车厢运动,能够调整所述无人车1的重心;所述机械手5也能够抵接地面或周围的物体,扶正歪倒的无人车1,辅助所述无人车1移动。
57.本发明的有益效果如下:(1)本发明的所述服务车安装服务软件,通过所述服务软件与所述数字农业系统和无人车1无线通信,自主决策,为所述无人车1更换其可换电池121和药箱13,提供维修保养服务,也能够载运所述无人车1、维修设备和维修人员。所述服务车优选现有的厢式货车,能够充分利用社会闲散的货车和驾驶员资源,利用共享服务模式提供服务;所述无人车1和无人机2,也能够利用共享服务模式,进行精准喷药作业,为规模化种植业的业主或服务者提供服务。本发明的喷药系统,针对规模化种植农作物的精准喷药,能够在所述数字农业系统的统一管控和调度下,自主决策,规划路线和航线,并导航,能够达到整体最优。
58.现有的无人机喷药,携带的农药量一般在10~30kg;在电量不足或农药用完时,需要返回更换药箱或电池;载重小,续航时间短,安全性和稳定性不足。现有的农药喷洒机器人携带电量和药量充足,安全可靠,能够精准施药;但是,需要在地面上移动,会伤害农作物,也会因地面的不确定性障碍物受阻;明显存在技术矛盾。规模化种植面积剧增,使得此
技术矛盾加剧;系留无人机的地面移动单元,在载重较大时,必然增大体积,影响在田地中的移动,难以达到整体最优。
59.与现有系留无人机喷药相比,本发明的喷药系统针对规模化种植的农作物,进行精准喷药,能够充分利用社会闲散的货车和驾驶员资源,利用共享服务模式提供服务;在所述数字农业系统的统一管控和调度下,自主决策,规划路线并导航,能够达到整体最优。
60.另外,所述服务车自主决策提供服务,自主决策从水源取水,也可无人自动驾驶;所述无人车1携带一架或多架无人机2,在田地中沿着农作物的行间、田垄或田埂自主行走,也在田间道路上低速自动驾驶,能够自主避障和导航,不伤害农作物;因此,本发明的喷药系统,能够提高智能化水平,促进无人化。
61.(2)本发明的所述无人机2带有插头24,在所述系留缆3的控制和引导下,通过所述插头24插入所述臂架4的插座43,并锁紧,使得所述无人机2安全降落于所述臂架4,也使得所述插头24与所述插座43分离,使得所述无人机2从所述臂架4起飞。所述无人机2在降落于所述臂架4或从所述臂架4起飞时,都优选将所述臂架4上升到最大高度,减轻起降过程对于近地空气的扰动和对农药飘移的影响,避免引起污染和伤害。在起降过程中,如果所述无人机2意外失稳,并通过所述系留缆3悬挂于所述臂架4,则所述机械手5可以夹持所述无人机2的起落架22,扶正失稳的无人机2,辅助所述无人机2降落于所述臂架4。
62.现有的系留无人机与地面移动单元通过系留缆连接,系留缆会松弛、打结、张紧和崩断,影响飞行姿态,会引发安全事故,造成摔机。田野中有树木、灌木、电线、杆塔、建筑物等障碍物,也有湖、河、丘岗、陡坡和碑石等危险因素,加上不确定的阵风,影响飞行安全,尤其是在系留无人机的起飞和降落过程。另外,现有无人机的起降过程引发剧烈的近地空气流动,会扬起灰尘、砂石和枝叶,引起污染和伤害,降低使用寿命;也会加剧喷洒农药的飘移,易伤害人畜和其他农作物,带来安全风险。
63.因此,与现有的系留无人机相比,本发明的所述无人机2能够降落于所述臂架4或从所述臂架4起飞,提高起降过程的安全性和可靠性,减轻起降过程对于近地空气的扰动和对农药飘移的影响,避免引起污染和伤害。另外,本发明的所述无人机2的起降、收放、载运和存放,不需要人工干预,自动化和智能化程度高,便于实现无人化。
64.(3)本发明所述无人机2的备用电池26位于所述机身21前部的电池插槽中。在起飞前,所述机械手5可以夹持所述无人机2的旋翼23,合理调节所述旋翼23相对于所述机身21的位置和距离,使得所述插头24、基座25、系留缆3和农药的重量得到最佳平衡。
65.现有的无人机喷药,药量不断变化,续航时间短,安全性和稳定性不足;现有的系留无人机携带系留缆,系留缆会松弛、打结、张紧和崩断,影响飞行姿态,会引发安全事故,造成摔机。因此,与现有的无人机和系留无人机喷药相比,本发明的所述无人机2能够依据农作物高度,确定最佳的飞行高度和所述臂架4的最佳高度,不必返回,避免重喷和漏喷,实现精准喷药;能够充分利用大数据,辅助决策,通过所述机械手5调节所述旋翼23相对于所述机身21的位置和距离,达到最佳平衡,减少所述无人机2的飞行控制难度,提高飞行稳定性。
66.另外,与现有的喷药无人机相比,本发明的所述无人机2,采用非对称结构,不携带大量农药,重量轻,体积小;在拆除所述插头24、基座25和喷头27后,在所述机身21的两个电池插槽中都插入备用电池26,能够获得前后对称的结构。因此,本发明的所述无人机2能够
单独使用,用于其他作业,如巡查、航拍和测绘,获取图像和照片。
67.(4)本发明所述无人机2带有插头24,能够通过所述插头24插入所述臂架4的插座43,并锁紧,使得所述无人机2安全降落于所述臂架4,收放于所述无人车1的车厢内,运载和存放。所述无人机2也带有起落架22,并能够通过所述起落架22降落于地面,使得所述无人机2能够单独使用。所述起落架22还能够被所述机械手5夹持,以扶正失稳的无人机2,辅助所述无人机2降落于所述臂架4。
68.因此,与现有的无人机相比,本发明的所述无人机2能够降落于所述臂架4,使得无人车1不必带有大面积的降落平台,能够减小体积,在田地中自主行走,也使得所述服务车能够使用现有的厢式货车,能够达到整体最优。另外,本发明扩展了所述起落架22的应用,使得所述无人机2的应用范围得到扩展,通用性提高,能够提高所述无人机2起降的安全性和可靠性。
69.(5)本发明的所述机械手5安装在所述无人车1的车厢,能够相对所述车厢运动,也能够收放于所述车厢;能够夹持所述支撑板17,以收起或放平所述支撑板17;能够夹持所述无人机2的旋翼23,折叠、打开并调节所述旋翼23;能够夹持所述无人机2的起落架22,扶正失稳的无人机2,辅助所述无人机2降落于所述臂架4;也能够扶正歪倒的无人车1,辅助所述无人车1的移动。
70.因此,与现有的喷药机器人或系留无人机喷药系统相比,本发明的所述无人车1,能够自动打开和关闭其车厢,能够使携带的所述无人机2自主起降,能够自主收放其无人机2、臂架4和机械手5;所述机械手5还能够扶正歪倒的无人车1,辅助所述无人车1的移动。明显地,本发明充分利用新一代信息技术,能够实现整体最优;能够促进新一代信息技术、汽车自动驾驶和共享经济的发展和应用,提高智能化水平,促进无人化。
附图说明
71.图1为所述无人车1、无人机2、系留缆3、臂架4和机械手5的总体结构示意图;图2为图1中a—a所示的剖视图;图3为图1中b—b所示的剖视图;图4为所述插座43的实施例结构示意图;图5为所述无人车1行驶路线与所述无人机2飞行航线实施例的示意图。
72.附图标记说明:无人车1、控制箱11、固定电池12、可换电池121、药箱13、药泵14、收放线装置15、导轮16、支撑板17、连杆18、动厢板19、动顶板191、动侧板192、无人机2、机身21、起落架22、旋翼23、插头24、基座25、备用电池26、喷头27、系留缆3、输液软管31、臂架4、工字梁41、扣槽42、插座43、机械手5、行驶路线61、飞行航线62、田埂63和田间道路64。
具体实施方式
73.以下结合附图和具体的实施方式对本发明的技术方案进行详细地说明:图1为所述无人车1、无人机2、系留缆3、臂架4和机械手5的总体结构示意图;图2为图1中a—a所示的剖视图。所述无人车1包含底盘、车头和车厢,带有控制箱11、固定电池12、电池护栏、可换电池121、药箱支架、药箱13、药泵14、收放线装置15、导轮16、支撑板17、连杆18和动厢板19,在所述底盘的下侧安装车轮,在所述底盘上侧的后部安装车厢,在所述底盘
上侧的前部安装车头。所述底盘包含传动系、行驶系、转向系和制动系四部分,优选现有汽车底盘的材料和工艺加工制造。
74.所述车头为竖扁形的箱体结构,带有背板和底板,优选现有汽车车身的材料和工艺加工制造。所述车头安装的雷达传感器、摄像头和车灯,优选公知的雷达传感器、摄像头和车灯产品。所述车厢为平扁形的箱体结构,包含底板、顶板、侧板、前端板和后端板,优选现有货车车厢的材料和工艺加工制造。所述车厢、车头和底盘的固定连接和安装,优选紧固件连接。
75.所述控制箱11为竖扁形的箱体结构,优选公知的控制箱或配电箱成品,也可用低碳钢钢板型材经过冲压加工成形。所述控制箱11在所述车头内上部的背板的安装,优选紧固件连接。所述电路板至少包含卫星定位模块、图像处理模块、移动通信模块、无人机通信模块、环境感知模块、行为决策模块、执行模块、臂架监控模块、机械手监控模块、电源模块和总控模块,优选现有的模块、模组和电子元件,采用嵌入式开发技术设计开发,并采用现有印刷电路板工艺加工制造。所述电路板在所述控制箱11的固定安装,优选公知的紧固件连接和固定。
76.所述固定电池12和可换电池121都优选公知的锂电池,也可选用铅酸电池。所述固定电池12在所述车头底板上的固定安装,优选公知的紧固件连接和固定。所述电池护栏为封闭的围栏形结构,顶部开放,优选公知的钢管型材经过焊接加工成形,并通过紧固件固定安装在所述车厢的底板上。
77.所述药箱支架为顶部开放的框架形结构,优选公知的钢管型材经过焊接加工成形,并通过紧固件固定安装在所述车厢的底板上。所述药箱13为长方形的容器,优选塑料经过现有塑料容器的加工工艺加工成形。所述药泵14带有电机,优选现有的药泵产品。所述药泵14分别与所述药箱13和收放线装置15连接的管道及其连接,优选现有的管道和管件产品。
78.所述收放线装置15至少包含卷筒、电机和底座,优选现有系留无人机地面单元的收放线装置产品。其底座在所述车厢底板前部的固定安装,优选公知的紧固件连接和固定。所述导轮16由互相靠近的两个滑轮组成,优选现有的滑轮产品,并优选紧固件连接,固定安装在所述车厢底板的中部。
79.所述支撑板17为带有曲面的板形结构,优选公知的低碳钢板材经过冲压加工成形。所述支撑板17在所述车厢前端板和后端板内侧安装的弹簧铰链,优选公知的弹簧铰链产品。所述连杆18为平面四杆结构,优选公知的钢管型材制造,其电机优选公知的电机产品。
80.所述动厢板19包含动顶板191和动侧板192;所述动顶板191和动侧板192都为长方形的平板结构,都优选现有货车车厢的材料和工艺加工制造。所述动顶板191在前后两端的上部通过铰链与所述连杆18铰接,在下沿通过铰链与所述动侧板192的下沿铰接,所述动侧板192在上沿通过铰链与所述车厢的侧板铰接,都优选现有货车车厢厢板的铰链产品。
81.所述无人机2至少包含机身21、起落架22、旋翼23、插头24、基座25、备用电池26和喷头27。所述机身21为曲面箱体形结构,在外表面安装传感器和摄像头,在内部固定安装两个电池插槽、天线和主板,与所述旋翼23铰接;所述机身21、电池插槽、天线和主板都选用现有无人机的材料和工艺加工制造。所述主板至少带有通信模块、控制模块、导航模块、数据
处理模块和电源模块,优选现有无人机控制系统的研发技术开发并制造。所述起落架22和旋翼23都选用现有无人机零件的材料和工艺加工制造。
82.所述插头24为长条形的非旋转体结构,在其中心带有沿着轴向的圆形通孔,呈现沿着轴向的楔形;优选铝合金型材经过压铸或锻造成形。所述插头24在前端与所述基座25的固定连接,优选螺纹紧固件连接。所述基座25为平扁形的箱体结构,在前后侧面都带有通孔,优选所述机身21的材料和工艺加工制造。所述基座25在上表面与所述机身21后部下表面的可拆卸连接,优选紧固件连接。所述分接板,使得所述系留缆3分别与所述机身21的主板和喷头27连接,优选公知的分接板或接线板产品。
83.所述备用电池26插入并卡固于所述机身21前部的电池插槽中,优选公知的锂电池产品。所述喷头27包含电磁阀、喷杆和喷嘴,优选公知的电磁阀、喷杆和喷嘴产品,经过管件紧固连接成为一个整体,便于安装和维修。
84.所述系留缆3至少包含保护层、耐张力线、通信线缆、电力线缆和输液软管31,具有柔性,能够弯曲,承受张力,传输通信信号和电能,通过所述输液软管31输送农药,优选现有用于喷药系留无人机的系留缆产品。所述臂架4包含支座、支臂和支架;其带有的传感器和电机,优选公知的传感器和电机产品。所述支臂和支架都带有空心结构,优选铝合金型材经过机械加工成形。
85.图3为图1中b—b所示的剖视图;在图3所示的实施例中,所述支臂和支架都包含工字梁41和扣槽42,通过所述扣槽42的扣舌卡扣在所述工字梁41的卡槽中,形成所述空心结构。所述工字梁41和扣槽42都优选公知的铝合金型材,或者采用生产铝合金型材的工艺加工制造。
86.所述支座优选铝合金材料经过锻造成形。所述支座在所述车厢底板中央的固定安装优选紧固件连接。所述支架带有插座43;所述插座43为带有轴向通孔的杆状结构,一端与所述支架固定连接,另一端为自由端,优选铝合金材料经过锻造成形;所述插座43与所述支架的固定连接优选焊接。
87.图4为所述插座43的实施例结构示意图;在图4中,所述插孔的横截面为圆角菱形的非旋转结构;所述插孔在其末端带有触点开关431,在靠近其末端的内壁上带有锁舌432。所述触点开关431优选现有的触点开关产品。所述锁舌432优选铝合金材料经过锻造成形,能够被操作产生夹紧和松开的动作,以锁紧和释放所述无人机2的插头24。所述机械手5安装于所述车厢底板的中部,优选现有的传感器和电机产品,采用现有机械手的材料和工艺加工制造。为了轻量化,优选铝合金材料。
88.所述服务车优选现有的厢式货车,携带可换电池121、药箱13、水箱、配药装置、农药商品和维修工具,安装服务软件。所述服务软件优选现有的软件开发系统开发,针对汽车的行车电脑、车载终端和手机分别开发不同的版本,安装于行车电脑、车载终端或驾驶员的手机,能够与所述数字农业系统和无人车1无线通信。
89.所述数字农业系统为位于云端的软件系统,至少存储水源信息、地理信息与规模化种植农作物的图形图像和植保信息,存储所述无人车1、无人机2和服务车的信息,通过移动通信系统与所述无人车1和服务车实时通信,获取其地理位置和状态信息,也发送调度指令。所述数字农业系统能够生成喷药作业任务、服务任务和喷药区域信息,并发送给所述无人车1,能够接收所述无人车1的服务申请,生成服务任务,并发送给所述服务车。所述数字
农业系统及其上述功能,采用现有基于云计算的软件开发系统开发,采用公知的编程语言编码,运行于现有的商业化云平台。
90.图5为所述无人车1行驶路线与所述无人机2飞行航线实施例的示意图。在图5中,一辆所述无人车1携带两架无人机2;所述无人车1在田地中沿着田埂63,或在田间道路上,沿着行驶路线61行驶;所述无人机2沿着飞行航线62飞行。所述行驶路线61采用带箭头的粗线表示,所述箭头指示行驶方向。所述飞行航线62采用无箭头的细线表示。在所述行驶路线61和飞行航线62中,实线表示处于开启喷头27的状态,虚线表示处于关闭喷头27的状态;田间的空白处为田间道路64。所述无人车1从田地的农作物行间、田垄或田埂进入田间道路,也从所述田间道路进入田地的农作物行间、田垄或田埂,因此能够不伤害农作物;优选合理规划农作物的种植区域和田间道路,便于所述无人车1通行,也便于其他的农业机械作业。
91.上述实施仅仅是本发明的优选实施方式,不构成对本发明的限制。在满足本发明的结构和性能要求条件下,改变材料和制造工艺,都在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1