一种农作物长势监测无人机组装装置
1.本发明涉及无人机领域,尤其涉及一种农作物长势监测无人机组装装置。
背景技术:
2.在农作物涨势检测无人机组装过程中,无人机部件多、体积小、形状怪异、装配工序多,装配过程需要不停的转换工位,大大影响了装配的效率,影响了产品装配质量。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提供一种工序集中、自由调整装配方位的一种农作物长势监测无人机组装装置。
4.本发明的目的是通过以下技术方案来实现:一种农作物长势监测无人机组装装置,包括工作台、调整装置、驱动装置,所述工作台中间具有工作台方孔,工作台方孔左侧具有升降杆孔,工作台下部具有四个支撑腿,工作台上部通过工作台方孔固定连接调整装置,支撑腿下部固定连接驱动装置;所述调整装置包括调整座、方轴、转轴、吸盘、摇臂,调整座底部具有调整座方孔,调整座内部具有调整轨道,方轴中间具有方轴孔,方轴底部具有轴肩,转轴上部垂直方向具有横孔,吸盘下部具有吸盘轴,吸盘轴外侧具有摇臂轴,摇臂中间具有摇臂孔,摇臂外侧具有球头,方轴下部固定连接工作台方孔,轴肩定位在工作台方孔上部,调整座方孔滑动连接方轴外部,调整座方孔在方轴上滑动,转轴转动连接方轴孔,转轴在方轴孔中转动,吸盘轴转动连接横孔,吸盘轴在横孔中转动,摇臂孔固定连接摇臂轴,球头滑动连接调整轨道;所述驱动装置包括驱动座、摇摆驱动杆、上下驱动杆、一号齿条、二号齿条、释放座、右靠板、左靠板、棘轮装置, 驱动座左右两侧各具有一个侧板,每个侧板上部各具有一个侧板孔,驱动座中间具有驱动座孔,驱动座孔左侧具有右立板,右立板上部具有右立板孔,右立板孔左前方具有中立板,中立板中间具有中立板滑轨,中立板滑轨中间具有中立板槽,中立板左侧具有左立板,左立板中间具有左立板滑轨,左立板右侧面中间具有左立板上孔,左立板上孔下部具有左立板下孔,一号齿条前侧具有一号滑块,一号齿条下部具有连接板,连接板右侧具有脚踏板,一号滑块滑动连接中立板滑轨,一号滑块在中立板滑轨中滑动,同时连接板在中立板槽中滑动,一号弹簧放在中立板滑轨中,一号弹簧上部抵住一号齿条下部,一号弹簧下部抵住工作台上部。
5.所述二号齿条后侧具有二号滑块,二号齿条上部具有连接杆,释放座上部具有固定齿,释放座右侧具有转轴,释放座下部具有压板,压板前部具有弹簧销,二号滑块滑动连接左立板滑轨,二号滑块在左立板滑轨中滑动,连接杆上部穿过升降杆孔并固定连接调整座下部,转轴转动连接左立板下孔,转轴在左立板下孔中转动,二号弹簧内部套入弹簧销,二号弹簧下部抵住弹簧销上部,二号弹簧下部抵住工作台上部,固定齿卡在二号齿条中。
6.所述右靠板右侧具有右靠板轴,右靠板左侧具有右靠板槽,左靠板左侧具有左靠板轴,左靠板后侧具有左靠板槽,左靠板轴滑动连接左侧侧板孔,左靠板轴在左侧中滑动,
右靠板轴滑动连接右侧侧板孔,右靠板轴在右侧侧板孔中滑动。
7.所述上下驱动杆左侧具有驱动板,上下驱动杆中间具有二号齿轮,上下驱动杆右侧具有三号齿轮,二号齿轮和三号齿轮之间的上下驱动杆滑动连接左立板上孔,三号弹簧套在二号齿轮和三号齿轮中间的上下驱动杆外部,三号弹簧左侧抵住左立板右侧面,三号弹簧右侧抵住三号齿轮左侧,左靠板槽卡在驱动板两侧,二号齿轮和二号齿条相互啮合,三号齿轮和一号齿条相互啮合。
8.所述摇摆驱动杆左侧具有一号齿轮, 摇摆驱动杆右侧具有锥齿轮驱动板,锥齿轮驱动板右侧具有一号锥齿轮,摇摆驱动杆滑动连接右立板孔,摇摆驱动杆在右立板孔中滑动,四号弹簧套在摇摆驱动杆外部,四号弹簧左侧抵住一号齿轮左侧,四号弹簧右侧抵住右立板左侧,右靠板槽卡在锥齿轮驱动板两侧,一号齿轮和一号齿条相互啮合,一号锥齿轮和二号锥齿轮相互啮合。
9.所述棘轮装置包括驱动轴、棘轮座、棘爪,驱动轴上端面具有棘爪轴,棘爪轴一侧具有弹片,驱动轴上部具有二号锥齿轮,棘轮座底板具有棘轮座孔,棘轮座内部具有多个分度齿,棘轮座孔转动连接驱动轴,棘轮座下部放置在二号锥齿轮上部,棘爪转动连接棘爪轴,棘爪卡在分度齿内部,弹片抵住棘爪内部,棘轮座上部固定连接转轴下部,二号锥齿轮和一号锥齿轮互相啮合,一号齿轮和一号齿条相互啮合。
10.有益效果:使用本装置时,需要组装的无人机外壳放置在吸盘上部,采用吸盘方式固定无人机外壳,调整座往上移动时,调整轨道带动球头往上移动,球头带动吸盘轴在横孔中顺时针转动,调整座往下移动时,调整轨道带动球头往下移动,球头带动吸盘轴在横孔中逆时针转动,通过调整座上下移动,调整无人机相对操作者上下位置,转轴转动,带动吸盘转动,可以调整吸盘相对操作者左右位置,对调整座和转轴综合调整,可以使无人机相对操作者有合适的位置。
11.上下驱动杆在左立板上孔中滑动,在三号弹簧作用下,上下驱动杆停在右侧位置,二号齿轮和二号齿条,三号齿轮和一号齿条同时脱离啮合,当操作者膝部往左推动左靠板时,左靠板槽带动驱动板往左侧移动,二号齿轮和二号齿条相互啮合,三号齿轮和一号齿条相互啮合,此时踩动脚踏板,一号齿条下移,一号齿条带动三号齿轮和二号齿轮转动,二号齿轮带动二号齿条往上移动,连接杆推动调整座往上移动,固定齿在二号弹簧作用下卡在二号齿条中,此时如果踩动压板,固定齿从二号齿条中脱离,二号齿条会复位,当操作者膝部松开左靠板时,在三号弹簧作用下,上下驱动杆再次停在右侧位置,二号齿轮和二号齿条,三号齿轮和一号齿条同时脱离啮合,一号齿条复位。
12.摇摆驱动杆在右立板孔中滑动,摇摆驱动杆在四号弹簧作用下停止在左侧位置,一号齿轮和一号齿条,一号锥齿轮和二号锥齿轮相互脱离,当操作者膝部往右推动右靠板时,右靠板槽带动锥齿轮驱动板往右侧移动,一号齿轮和一号齿条相互啮合,一号锥齿轮和二号锥齿轮相互啮合,此时踩动脚踏板,一号齿条下移,一号齿条带动一号齿轮和一号锥齿轮转动,一号锥齿轮转动二号锥齿轮转动,二号锥齿轮转动通过棘爪带动 棘轮座转动,棘轮座转动带动转轴转动,当操作者膝部松开右靠板时,在四号弹簧作用下,摇摆驱动杆再次停在左侧位置,一号齿轮和一号齿条,一号锥齿轮和二号锥齿轮同时脱离啮合,一号齿条在一号弹簧作用下复位。
13.本发明将无人机的组装工序集中在一起,通过膝部推动两侧的右靠板和左靠板,
通过脚部踩动脚踏板,控制吸盘的空间方位的调整,解放了双手,大大提高了工作效率,吸盘空间方位调整方便,适应无人机复杂形状、多部件、多工序特性,右靠板轴和左靠板轴采用方形机构滑动连接侧板孔,既解决滑动的平稳性,又防止右靠板和左靠板的转动,左靠板槽卡在驱动板两侧,右靠板槽卡在锥齿轮驱动板两侧,既带动上下驱动杆和摇摆驱动杆的移动,又不影响上下驱动杆和摇摆驱动杆的转动,调整座上下位置有定位,自动卡入二号齿条,踩动即可释放,操作方便,定位准确,防止装配过程中吸盘的晃动,影响装配质量,吸盘水平位置的调整有棘轮装置完成,棘轮装置只能朝一个方向转动,分度齿的齿形具有方向性,驱动轴带动棘爪逆时针转速时,带动棘轮座逆时针转动,驱动轴带动棘爪顺时针转动时,棘爪从分度齿中滑出,棘轮座不会转动,弹片保证棘爪不脱离分度齿,棘轮装置单方向转动保证吸盘但方向转动,保证装配的顺序性,调整装置运动部件安装在调整座上,保证了各运动部件的尺寸精度和位置精度,保证各部件配合精度和运动精度,保证了吸盘位置调整的准确性和定位的准确性,方轴和方轴孔采用方轴滑动配合,保证调整座沿方轴滑动的平稳,防止卡顿,又防止调整座转动和晃动,影响了吸盘稳定,摇臂和调整轨道采用球面滑动,滑动平稳,不会卡顿。
附图说明
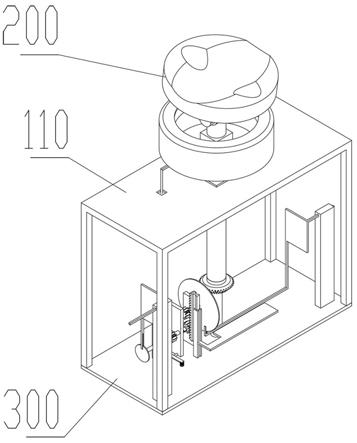
14.图1为本发明所述的农作物长势监测无人机组装装置整体结构示意图。
15.图2为本发明所述的驱动装置结构示意图。
16.图3为本发明所述的上下驱动杆动作时结构示意图。
17.图4为本发明所述的摇摆驱动杆动作时结构示意图。
18.图5为本发明所述的驱动装置后侧结构示意图。
19.图6为本发明所述的驱动装置俯视结构示意图。
20.图7为本发明所述的工作台结构示意图。
21.图8为本发明所述的调整装置结构示意图。
22.图9为本发明所述的调整座结构示意图。
23.图10为本发明所述的方轴结构示意图。
24.图11为本发明所述的转轴结构示意图。
25.图12为本发明所述的吸盘结构示意图。
26.图13为本发明所述的摇臂结构示意图。
27.图14为本发明所述的驱动座结构示意图。
28.图15为本发明所述的摇摆驱动杆结构示意图。
29.图16为本发明所述的山下驱动杆结构示意图。
30.图17为本发明所述的一号齿条结构示意图。
31.图18为本发明所述的二号齿条结构示意图。
32.图19为本发明所述的释放座结构示意图。
33.图20为本发明所述的右靠板结构示意图。
34.图21为本发明所述的左靠板结构示意图。
35.图22为本发明所述的棘轮装置结构示意图。
36.图23为本发明所述的驱动轴结构示意图。
具体实施方式
37.下面根据附图和实施例对本发明作进一步详细说明:一种农作物长势监测无人机组装装置,包括工作台110、调整装置200、驱动装置300,所述工作台110中间具有工作台方孔111,工作台方孔111左侧具有升降杆孔112,工作台110下部具有四个支撑腿113,工作台110上部通过工作台方孔111固定连接调整装置200,支撑腿113下部固定连接驱动装置300;所述调整装置200包括调整座210、方轴220、转轴230、吸盘240、摇臂250,调整座210底部具有调整座方孔211,调整座210内部具有调整轨道212,方轴220中间具有方轴孔221,方轴220底部具有轴肩222,转轴230上部垂直方向具有横孔231,吸盘240下部具有吸盘轴241,吸盘轴241外侧具有摇臂轴242,摇臂250中间具有摇臂孔251,摇臂250外侧具有球头252,方轴220下部固定连接工作台方孔111,轴肩222定位在工作台方孔111上部,调整座方孔211滑动连接方轴220外部,调整座方孔211在方轴220上滑动,转轴230转动连接方轴孔221,转轴230在方轴孔221中转动,吸盘轴241转动连接横孔231,吸盘轴241在横孔231中转动,摇臂孔251固定连接摇臂轴242,球头252滑动连接调整轨道212;所述驱动装置300包括驱动座310、摇摆驱动杆330、上下驱动杆340、一号齿条350、二号齿条360、释放座370、右靠板380、左靠板385、棘轮装置400, 驱动座310左右两侧各具有一个侧板312,每个侧板312上部各具有一个侧板孔313,驱动座310中间具有驱动座孔311,驱动座孔311左侧具有右立板314,右立板314上部具有右立板孔315,右立板孔315左前方具有中立板316,中立板316中间具有中立板滑轨317,中立板滑轨317中间具有中立板槽318,中立板316左侧具有左立板319,左立板319中间具有左立板滑轨320,左立板319右侧面中间具有左立板上孔321,左立板上孔321下部具有左立板下孔322,一号齿条350前侧具有一号滑块351,一号齿条350下部具有连接板352,连接板352右侧具有脚踏板353,一号滑块351滑动连接中立板滑轨317,一号滑块351在中立板滑轨317中滑动,同时连接板352在中立板槽318中滑动,一号弹簧390放在中立板滑轨317中,一号弹簧390上部抵住一号齿条350下部,一号弹簧390下部抵住工作台110上部。
38.所述二号齿条360后侧具有二号滑块361,二号齿条360上部具有连接杆362,释放座370上部具有固定齿371,释放座370右侧具有转轴372,释放座370下部具有压板373,压板373前部具有弹簧销374,二号滑块361滑动连接左立板滑轨320,二号滑块361在左立板滑轨320中滑动,连接杆362上部穿过升降杆孔112并固定连接调整座210下部,转轴372转动连接左立板下孔322,转轴372在左立板下孔322中转动,二号弹簧391内部套入弹簧销374,二号弹簧391下部抵住弹簧销374上部,二号弹簧391下部抵住工作台110上部,固定齿371卡在二号齿条360中。
39.所述右靠板380右侧具有右靠板轴381,右靠板380左侧具有右靠板槽382,左靠板385左侧具有左靠板轴386,左靠板385后侧具有左靠板槽387,左靠板轴386滑动连接左侧侧板孔313,左靠板轴386在左侧383中滑动,右靠板轴381滑动连接右侧侧板孔313,右靠板轴381在右侧侧板孔313中滑动。
40.所述上下驱动杆340左侧具有驱动板343,上下驱动杆340中间具有二号齿轮341,上下驱动杆340右侧具有三号齿轮342,二号齿轮341和三号齿轮342之间的上下驱动杆340滑动连接左立板上孔321,三号弹簧392套在二号齿轮341和三号齿轮342中间的上下驱动杆340外部,三号弹簧392左侧抵住左立板319右侧面,三号弹簧392右侧抵住三号齿轮342左
侧,左靠板槽387卡在驱动板343两侧,二号齿轮341和二号齿条360相互啮合,三号齿轮342和一号齿条350相互啮合。
41.所述摇摆驱动杆330左侧具有一号齿轮333, 摇摆驱动杆330右侧具有锥齿轮驱动板332,锥齿轮驱动板332右侧具有一号锥齿轮331,摇摆驱动杆330滑动连接右立板孔315,摇摆驱动杆330在右立板孔315中滑动,四号弹簧393套在摇摆驱动杆330外部,四号弹簧393左侧抵住一号齿轮333左侧,四号弹簧393右侧抵住右立板314左侧,右靠板槽382卡在锥齿轮驱动板332两侧,一号齿轮333和一号齿条350相互啮合,一号锥齿轮331和二号锥齿轮413相互啮合。
42.所述棘轮装置400包括驱动轴410、棘轮座420、棘爪430,驱动轴410上端面具有棘爪轴411,棘爪轴411一侧具有弹片412,驱动轴410上部具有二号锥齿轮413,棘轮座420底板具有棘轮座孔422,棘轮座420内部具有多个分度齿421,棘轮座孔422转动连接驱动轴410,棘轮座420下部放置在二号锥齿轮413上部,棘爪430转动连接棘爪轴411,棘爪430卡在分度齿421内部,弹片412抵住棘爪430内部,棘轮座420上部固定连接转轴230下部,二号锥齿轮413和一号锥齿轮331有条件互相啮合,一号齿轮333有条件和一号齿条350相互啮合。
43.使用本装置时,需要组装的无人机外壳放置在吸盘240上部,采用吸盘方式固定无人机外壳,调整座210往上移动时,调整轨道212带动球头252往上移动,球头252带动吸盘轴241在横孔231中顺时针转动,调整座210往下移动时,调整轨道212带动球头252往下移动,球头252带动吸盘轴241在横孔231中逆时针转动,通过调整座210上下移动,调整无人机相对操作者上下位置,转轴230转动,带动吸盘240转动,可以调整吸盘240相对操作者左右位置,对调整座210和转轴230综合调整,可以使无人机相对操作者有合适的位置。
44.上下驱动杆340在左立板上孔321中滑动,在三号弹簧392作用下,上下驱动杆340停在右侧位置,二号齿轮341和二号齿条360,三号齿轮342和一号齿条350同时脱离啮合,当操作者膝部往左推动左靠板385时,左靠板槽387带动驱动板343往左侧移动,二号齿轮341和二号齿条360相互啮合,三号齿轮342和一号齿条350相互啮合,此时踩动脚踏板353,一号齿条350下移,一号齿条350带动三号齿轮342和二号齿轮341转动,二号齿轮341带动二号齿条360往上移动,连接杆362推动调整座210往上移动,固定齿371在二号弹簧391作用下卡在二号齿条360中,此时如果踩动压板373,固定齿371从二号齿条360中脱离,二号齿条360会复位,当操作者膝部松开左靠板385时,在三号弹簧392作用下,上下驱动杆340再次停在右侧位置,二号齿轮341和二号齿条360,三号齿轮342和一号齿条350同时脱离啮合,一号齿条350复位。
45.摇摆驱动杆330在右立板孔315中滑动,摇摆驱动杆330在四号弹簧393作用下停止在左侧位置,一号齿轮333和一号齿条350,一号锥齿轮331和二号锥齿轮413相互脱离,当操作者膝部往右推动右靠板380时,右靠板槽382带动锥齿轮驱动板332往右侧移动,一号齿轮333和一号齿条350相互啮合,一号锥齿轮331和二号锥齿轮413相互啮合,此时踩动脚踏板353,一号齿条350下移,一号齿条350带动一号齿轮333和一号锥齿轮331转动,一号锥齿轮331转动二号锥齿轮413转动,二号锥齿轮413转动通过棘爪430带动 棘轮座420转动,棘轮座420转动带动转轴230转动,当操作者膝部松开右靠板380时,在四号弹簧393作用下,摇摆驱动杆330再次停在左侧位置,一号齿轮333和一号齿条350,一号锥齿轮331和二号锥齿轮413同时脱离啮合,一号齿条350在一号弹簧390作用下复位。
46.本装置将无人机的组装工序集中在一起,通过膝部推动两侧的右靠板380和左靠板385,通过脚部踩动脚踏板353,控制吸盘240的空间方位的调整,解放了双手,大大提高了工作效率,吸盘240空间方位调整方便,适应无人机复杂形状、多部件、多工序特性,右靠板轴381和左靠板轴386采用方形机构滑动连接侧板孔313,既解决滑动的平稳性,又防止右靠板380和左靠板385的转动,左靠板槽387卡在驱动板343两侧,右靠板槽382卡在锥齿轮驱动板332两侧,既带动上下驱动杆340和摇摆驱动杆330的移动,又不影响上下驱动杆340和摇摆驱动杆330的转动,调整座210上下位置有271定位,270自动卡入二号齿条360,踩动270即可释放,操作方便,定位准确,防止装配过程中吸盘240的晃动,影响装配质量,吸盘240水平位置的调整有棘轮装置400完成,棘轮装置400只能朝一个方向转动,分度齿421的齿形具有方向性,驱动轴410带动棘爪430逆时针转速时,带动棘轮座420逆时针转动,驱动轴410带动棘爪430顺时针转动时,棘爪430从分度齿421中滑出,棘轮座420不会转动,弹片412保证棘爪430不脱离分度齿421,棘轮装置400单方向转动保证吸盘240但方向转动,保证装配的顺序性,调整装置200运动部件安装在调整座210上,保证了各运动部件的尺寸精度和位置精度,保证各部件配合精度和运动精度,保证了吸盘240位置调整的准确性和定位的准确性,方轴220和方轴孔221采用方轴滑动配合,保证调整座210沿方轴220滑动的平稳,防止卡顿,又防止调整座210转动和晃动,影响了吸盘240稳定,摇臂250和调整轨道212采用球面滑动,滑动平稳,不会卡顿。
47.一种农作物长势监测无人机组装装置的操作方法,包括以下步骤:第一步、使用本装置时,需要组装的无人机外壳放置在吸盘240上部,用吸盘方式固定无人机外壳。第二步、当操作者膝部往左推动左靠板385,踩动脚踏板353,吸盘240绕横孔231转动,调整无人机相对操作者上下位置,松开脚踏板353,上下驱动杆340和一号齿条350保持静止,踩动压板373,固定齿371从二号齿条360中脱离,二号齿条360和一号齿条350都会复位,吸盘240也会复位。第三步、当操作者膝部往右推动右靠板380时,踩动脚踏板353,转轴230带动吸盘240转动,调整吸盘240水平方向的位置,松开脚踏板353, 一号齿条350在一号弹簧390作用下复位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1