一种直升机外载荷减摆器的制作方法
1.本新型涉及一种直升机外载荷减摆器及使用方法,属无人机设备技术领域。
背景技术:
2.直升机在作业过程中经常需要进行外吊挂作业,比如森林灭火的外挂吊桶,山区转运物资时外挂物资,水上救援时外挂绞车等,虽然这类操作可以满足使用的需要,但在随直升机运行的过程中,外挂物极易因外部气流因素、直升机运行时飞行姿态调整时的加速度因素影响而发生不可控的摇摆,从而导致直升机的飞行姿态受到极大的影响,严重影响了直升机飞行控制性能,给直升机飞行造成了极大的安全隐患,严重时甚至造成坠机等严重的安全事故,而针对这一问题,目前尚无有效的应对设备,从而导致直升机吊装作业的安全性、适用性均受到了极大的限制。
3.因此针对这一问题,迫切需要开发一种直升机外载荷减摆装置,以满足实际使用的需要。
技术实现要素:
4.为了解决现有技术上的不足,本新型提供一种直升机外载荷减摆器,该新型一方面具有良好的承载负重能力及安装定位能力,可有效满足多种负载通过直升机进行吊装承载作业的需要;另一方面在随无人机运行时,可有效的提高吊装负载在随无人机设备运行时的定位稳定性,防止因吊装负载摇摆而导致的直升机飞行姿态控制难度大,甚至导致直升机坠毁等安全事故发生。
5.一种直升机外载荷减摆器,包括橇式起落架、牵引绳索、负载架、挂扣、挂板及阻尼器,负载架为正棱锥框架结构,与橇式起落架上端面同轴分布并位于橇式起落架两滑橇之间位置,负载架侧棱下端面位置设连接孔,并通过连接孔与牵引绳索末端连接,牵引绳索共四条,环绕负载架轴线均布,各牵引绳索与负载架侧棱及轴线分布在同一平面内,且牵引绳索轴线与负载架轴线呈20
°
—70
°
夹角,且牵引绳索上端通过挂板与橇式起落架底部的下表面连接,牵引绳索上端另与阻尼器连接,阻尼器与挂板外侧面连接并通过弹性铰链与挂板外侧面铰接,阻尼器轴线与负载架轴线呈0
°
—90
°
夹角,挂扣位于负载架内并与负载架顶角内表面连接,挂扣与负载架间同轴分布,且挂扣与负载架下端面间间距不小于负载架高度的90%。
6.进一步的,所述的负载架内表面设至少四条限位弹簧柱及与限位弹簧柱前端面连接的弹性衬板,负载架顶部设一个重力传感器、一个加速度传感器及一个接线端子,其中所述限位弹簧柱后端面与负载架内侧面通过棘轮机构铰接,其轴线与负载架轴线相交并呈30
°
—120
°
夹角,限位弹簧柱前端面与弹性衬板连接并同轴分布,所述弹性衬板与限位弹簧柱间通过弹性铰链铰接,所述重力传感器和加速度传感器均嵌于负载架锥顶内并与负载架同轴分布,所述接线端子嵌于负载架外表面并与重力传感器和加速度传感器电气连接。
7.进一步的,所述的负载架下端面内设承载托盘,所述承载托盘为横断面呈“h”字形
槽装框架结构,所述承载托盘与负载架间同轴分布,且承载托盘上端面通过至少四条弹性伸缩柱与负载架下端面连接,且弹性伸缩柱分别与负载架下端面及承载托盘上端面垂直分布。
8.进一步的,所述的阻尼器包括导向套、调节螺母、调节螺杆、承压弹簧、承载板、拉力传感器、连接挂扣、导向轮及接线端子,其中所述导向套为轴向截面呈矩形的圆柱管状结构,所述调节螺母嵌于导向套后端面并与导向套同轴分布,所述承载板嵌于导向套内与导向套同轴分布,且承载板与导向套内侧面滑动连接,所述承载板下端面通过拉力传感器与连接挂扣连接,且所述承载板、拉力传感器及连接挂扣间同轴分布,所述连接挂扣另与牵引绳索连接并通过导向轮承载;所述承压弹簧嵌于导向套内与导向套同轴分布,且承载弹簧两端分别与调节螺母下端面及承载板上端面相抵,并包覆在调节螺杆外,所述调节螺杆前端面与承载板上端面连接并同轴分布,后端面通过调节螺母位于导向套外,并与调节螺母间啮合连接,所述导向轮共两个,嵌于导向套前端面内并对称分布在导向套轴线两侧,且导向轮轴线与导向套轴线垂直分布,所述拉力传感器对应的导向套外侧面设一个接线端子,并与接线端子电气连接。
9.进一步的,所述的挂板为扇形板状结构,所述刮板上设与刮板同轴分布呈圆弧状的过线孔,且牵引绳索通过过线孔导向后与阻尼器连接。
10.进一步的,所述的牵引绳索为钢绞线、尼龙绳中的任意一种。
11.本新型一方面具有良好的承载负重能力及安装定位能力,可有效满足多种负载通过直升机进行吊装承载作业的需要;另一方面在随无人机运行时,可有效的提高吊装负载在随无人机设备运行时的定位稳定性,防止因吊装负载摇摆而导致的直升机飞行姿态控制难度大,甚至导致直升机坠毁等安全事故发生。
附图说明
12.下面结合附图和具体实施方式来详细说明本新型;
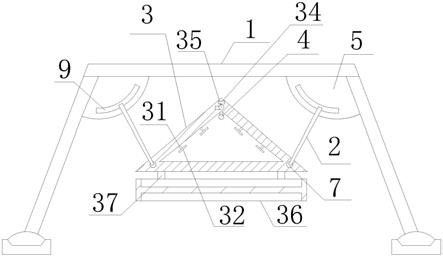
13.图1为本新型结构示意图;
14.图2为挂板及阻尼器连接结构示意图。
具体实施方式
15.为使本新型实现的技术手段、创作特征、达成目的与功效易于施工,下面结合具体实施方式,进一步阐述本新型。
16.如图1和2所示,一种直升机外载荷减摆器,包括橇式起落架1、牵引绳索2、负载架3、挂扣4、挂板5及阻尼器6,负载架3为正棱锥框架结构,与橇式起落架1上端面同轴分布并位于橇式起落架1两滑橇之间位置,负载架3侧棱下端面位置设连接孔7,并通过连接孔7与牵引绳索2末端连接,牵引绳索2共四条,环绕负载架3轴线均布,各牵引绳索2与负载架3侧棱及轴线分布在同一平面内,且牵引绳索2轴线与负载架3轴线呈20
°
—70
°
夹角,且牵引绳索2上端通过挂板与橇式起落架1底部的下表面连接,牵引绳索2上端另与阻尼器6连接,阻尼器6与挂板5外侧面连接并通过弹性铰链8与挂板5外侧面铰接,阻尼器6轴线与负载架3轴线呈0
°
—90
°
夹角,挂扣4位于负载架3内并与负载架3顶角内表面连接,挂扣4与负载架3间同轴分布,且挂扣4与负载架3下端面间间距不小于负载架3高度的90%。
17.重点说明的,所述的负载架3内表面设至少四条限位弹簧柱31及与限位弹簧柱31前端面连接的弹性衬板32,负载架3顶部设一个重力传感器33、一个加速度传感器34及一个接线端子35,其中所述限位弹簧柱31后端面与负载架3内侧面通过棘轮机构铰接,其轴线与负载架3轴线相交并呈30
°
—120
°
夹角,限位弹簧柱31前端面与弹性衬板32连接并同轴分布,所述弹性衬板32与限位弹簧柱31间通过弹性铰链铰接,所述重力传感器33和加速度传感器34均嵌于负载架3锥顶内并与负载架3同轴分布,所述接线端子35嵌于负载架3外表面并与重力传感器33和加速度传感器34电气连接。
18.与此同时,所述的负载架3下端面内设承载托盘36,所述承载托盘36为横断面呈“h”字形槽装框架结构,所述承载托盘36与负载架3间同轴分布,且承载托盘36上端面通过至少四条弹性伸缩柱37与负载架3下端面连接,且弹性伸缩柱37分别与负载架3下端面及承载托盘36上端面垂直分布。
19.需要特别说明的,所述的阻尼器6包括导向套61、调节螺母62、调节螺杆63、承压弹簧64、承载板65、拉力传感器66、连接挂扣67、导向轮68及接线端子35,其中所述导向套61为轴向截面呈矩形的圆柱管状结构,所述调节螺母62嵌于导向套61后端面并与导向套61同轴分布,所述承载板65嵌于导向套61内与导向套61同轴分布,且承载板65与导向套61内侧面滑动连接,所述承载板65下端面通过拉力传感器66与连接挂扣67连接,且所述承载板65、拉力传感器66及连接挂扣67间同轴分布,所述连接挂扣67另与牵引绳索2连接并通过导向轮68承载;所述承压弹簧64嵌于导向套61内与导向套61同轴分布,且承载弹簧64两端分别与调节螺母62下端面及承载板65上端面相抵,并包覆在调节螺杆63外,所述调节螺杆63前端面与承载板65上端面连接并同轴分布,后端面通过调节螺母62位于导向套61外,并与调节螺母62间啮合连接,所述导向轮68共两个,嵌于导向套61前端面内并对称分布在导向套61轴线两侧,且导向轮68轴线与导向套61轴线垂直分布,所述拉力传感器66对应的导向套61外侧面设一个接线端子35,并与接线端子35电气连接。
20.进一步优化的,所述的挂板5为扇形板状结构,所述刮板5上设与刮板5同轴分布呈圆弧状的过线孔9,且牵引绳索2通过过线孔9导向后与阻尼器6连接。
21.本实施例中,所述的牵引绳索2为钢绞线、尼龙绳中的任意一种。
22.本新型在具体实施中,首先根据直升机设备结构,设置满足直升机起降作业的橇式起落架,并将橇式起落架与直升机下机体连接,然后对构成本新型的橇式起落架、牵引绳索、负载架、挂扣、挂板及阻尼器进行组装,并将本新型的各接线端子与无人机的控制电路电气连接,即可完成本新型装配待用。
23.在进行重物承载转运时,将重物嵌入到负载架内并与挂扣连接,同时通过负载架设置的承载托盘、限位弹簧柱及弹性衬板对负载架内的负载进行加持定位,使重物与负载架同轴分布,然后通过牵引绳索对负载架进行牵引定位,并通过阻尼器调整各牵引绳索承受的拉力进行调整,使得各牵引拉绳承受的拉力值保持一致,并使各牵引绳索间形成的合力作用力方向沿负载架轴向向上分布,同时调整负载架与式起落架上端面间的间距,并通过负载架的重力传感器对负载架的位置进行检测,确保负载架与水平面垂直分布。
24.在直升机飞行作业时,由负载架的重力传感器和加速度传感器,对负载架随直升机运行时负载架及重物摆动作用力方向及摆动力矩进行检测,同时通过牵引绳索的拉力传感器对负载架及重物摆动作用力方向及摆动力矩进行检测,然后由阻尼器的承压弹簧对负
载架及重物摆动作用力进行弹性吸收,从而确保负载架及重物定位的稳定性;
25.与此同时,在运行中,另可通过负载架内的承载托盘、限位弹簧柱及弹性衬板对重物进行承载定位,使得承载重物与负载架间构成整体结构,并通过限位弹簧柱及弹性衬板对重物在随直升机运行时的摆动作用力进行弹性吸收,提高定位稳定性和精度。
26.本新型一方面具有良好的承载负重能力及安装定位能力,可有效满足多种负载通过直升机进行吊装承载作业的需要;另一方面在随无人机运行时,可有效的提高吊装负载在随无人机设备运行时的定位稳定性,防止因吊装负载摇摆而导致的直升机飞行姿态控制难度大,甚至导致直升机坠毁等安全事故发生。
27.以上显示和描述了本新型的基本原理和主要特征和本新型的优点。本行业的技术人员应该了解,本新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本新型的原理,在不脱离本新型精神和范围的前提下,本新型还会有各种变化和改进,这些变化和改进都落入要求保护的本新型范围内。本新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1