一种用于工厂钢梁的无人机吹扫装置的制作方法
1.本实用新型属于工厂清洁技术领域,具体涉及的是一种用于工厂钢梁的无人机吹扫装置。
背景技术:
2.不论是在火力发电厂钢结构清洁还是在其他大型厂房钢结构清洁工作都是极具危险的工作,而工厂中上部钢梁上随着工厂的设备运行会导致上方钢梁上灰尘颗粒物的堆积,厂房内的清洁度比较低,会影响到厂房内设备产品的加工。
3.现阶段一些厂房钢梁的清洁均是通过人工进行,但是这样危险系数高,效率低,并且成本较高。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺点,提供一种用于工厂钢梁的无人机吹扫装置,解决了人工清理钢梁危险系数高,效率低,并且成本较高等技术问题。
5.为了解决上述问题,本实用新型的技术方案为:一种用于工厂钢梁的无人机吹扫装置,其中:包括无人机、设于无人机底部的吹扫装置、转动驱动装置、监控系统和控制系统,所述转动驱动装置驱动吹扫装置转动;
6.所述吹扫装置包括安装板、两组输送装置和两组吹扫机构,两组所述输送装置分别设于安装板底面两侧,两组所述吹扫机构分别设置于两组输送装置上,且两组所述吹扫机构对称设置,两组所述输送装置分别驱动两组吹扫机构相向或相对移动;
7.所述吹扫机构包括吹扫风管、涵道风机和出风装置,所述吹扫风管上端为进风口,所述涵道风机固定设置于吹扫风管的进风口处,所述吹扫风管下端为出风口,所述出风装置固定设置于吹扫风管的出风口处;所述控制系统分别与无人机、输送装置、涵道风机、转动驱动装置和监控系统之间电气连接。
8.进一步,所述转动驱动装置包括两组转动驱动电机和两组转动轴,两组所述转动轴平行转动设于无人机底部固定板的底面前后两侧,两组所述转动驱动电机分别同轴设于两组转动轴一侧,且所述转动驱动电机的输出端与其相对应的一组转动轴的一端固定连接;
9.所述转动轴两侧固定设置有连接杆,所述连接杆底端与安装板顶面铰接,所述转动驱动电机驱动转动轴转动进而实现吹扫装置转动。
10.进一步,所述输送装置包括直线模组和中部固定设于直线模组的滑块上的滑动板,所述直线模组沿左右方向固定安装于安装板底面一侧中部,所述直线模组前后两侧的安装板底面对称设置有形输送板,所述形输送板底面内端设置有挡板,所述形输送板和挡板之间为输送槽;所述滑动板为倒“凵”形结构,所述滑动板的两侧壁内壁上分别转动设置有两组输送轮,设于两侧的所述输送轮分别设于与其同侧的输送槽中;
11.所述涵道风机前后两侧通过固定杆固定安装于滑动板底面,所述直线模组通过驱
动滑动板移动带动吹扫机构移动。
12.进一步,所述涵道风机包括涵道、设于涵道内的风扇和风扇驱动电机,所述风扇驱动电机同轴固定设于涵道后侧,所述风扇同轴固定设于风扇驱动电机的输出端,所述风扇驱动电机驱动风扇转动,所述风扇前侧的涵道内固定设置有整流罩,所述涵道后端与吹扫风管的进风口同轴固定连接。
13.进一步,所述涵道前端设置有过滤仓,所述过滤仓为空心的圆柱体结构,且所述过滤仓水平设置,所述过滤仓包括圆柱侧壁、设于圆柱侧壁内侧的内侧壁和设于圆柱侧壁外侧的外侧壁,所述圆柱侧壁和内侧壁上均设置有若干组第一过滤孔,所述外侧壁上设置有若干组第二过滤孔,所述第二过滤孔的直径尺寸大于第一过滤孔的直径尺寸。
14.进一步,所述风扇驱动电机为无刷电机。
15.进一步,所述出风装置包括锥形出风管和设于锥形出风管小端处的扁平状出风端;所述锥形出风管为锥形波纹管结构,所述出风装置处设置有出风方向调节装置,所述出风方向调节装置包括固定安装板、转动安装板、弧形齿条、驱动齿轮和齿轮驱动电机,所述固定安装板中部设置有第一过孔,所述固定安装板固定设于吹扫风管的出风口处,所述第一过孔与吹扫风管连通,所述锥形出风管的大端处连接于第一过孔处;
16.所述转动安装板下部设置有第二过孔,且所述转动安装板上部设置有电机安装槽,所述转动安装板固定设于锥形出风管的小端处,所述弧形齿条一端固定设于固定安装板上部,所述弧形齿条另一端穿过所述电机安装槽;所述齿轮驱动电机水平设于电机安装槽中,所述驱动齿轮同轴固定设于齿轮驱动电机的输出端处,且所述驱动齿轮与弧形齿条相啮合;所述齿轮驱动电机带动驱动齿轮沿弧形齿条转动,进而使转动安装板转动改变扁平状出风端的出风方向。
17.进一步,所述吹扫风管包括竖直设置的竖直风管、设于竖直风管顶端的进口水平风管和设于竖直风管底端的出口水平风管,所述进口水平风管和出口水平风管设置为相反方向,所述进口水平风管的外端与涵道风机连接,所述出口水平风管的外端与出风装置连接。
18.进一步,所述监控系统包括设于无人机上的红外视觉传感器、超声波传感器和激光雷达传感器;所述控制系统包括控制器和遥控器,所述遥控器和控制器之间电气连接。
19.进一步,所述无人机为系留无人机。
20.与现有技术相比,本实用新型的有益效果:
21.本实用新型通过系留无人机和吹扫装置的设置,将无人机运用到钢梁等复杂的清理工作中,可以长时间替代部分人力到不了的隐蔽和危险的地方,对钢结构进行一个全方位精细精密的清扫工作,无人机清扫方式可大幅缩短时间约40%~60%,单位使用人工成本下降 70%~75%,错误率缩小到3%~10%,可有效提升作业量,减少人工成本、减少工业浪费,从根本上避免了因清扫不当导致的人员伤亡,省时省力,效率高。
22.转动驱动装置的设置可以驱动吹扫装置的转动,可以更加精细的进行出风装置与钢梁的准确吹扫,输送装置的设置便于调整两组吹扫机构之间的距离,可以适应两组钢梁,实现两组钢梁的同时吹扫,提高了效率,节省了时间。出风方向调节装置的设置可以使得自动调节扁平状出风端的出风方向,可以朝向水平外侧吹风或者朝向下方吹风,根据实际厂房情况进行调整。
23.过滤仓的设置使得进入吹扫管道的风味清洁风,本实用新型是一种清洁、无污染、低耗能的吹灰装置。
附图说明
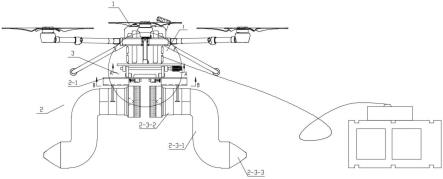
24.图1为本实用新型的结构示意图;
25.图2为本实用新型中吹扫装置的侧视图;
26.图3为图1中的局部放大示意图ⅰ;
27.图4为图1中的a-a视图;
28.图5为图1中的b-b视图;
29.图6为图2中的局部放大示意图ⅱ;
30.图7为本实用新型中吹扫机构的结构示意图;
31.图8为本实用新型中吹扫机构的另一视角示意图;
32.图9为本实用新型中涵道风机和过滤仓的结构示意图;
33.图10为本实用新型中涵道风机的结构示意图;
34.图11为本实用新型中涵道风机的另一视角结构示意图;
35.图12为本实用新型中出风方向调节装置的结构示意图;
36.图13为图12中出风方向调节装置将扁平状出风端朝下的状态结构示意图;
37.图14为本实用新型中转动安装板和齿轮驱动电机的结构示意图;
38.图15为本实用新型中转动安装板的结构示意图;
39.图16为本实用新型中固定安装板的结构示意图;
40.图17为本实用新型在厂房中的使用示意图。
具体实施方式
41.下面结合附图和实施例对本实用新型作进一步的详细描述。
42.如图1至12所示的一种用于工厂钢梁的无人机吹扫装置,其中:包括无人机1、设于无人机1底部的吹扫装置2、转动驱动装置3、监控系统和控制系统,所述转动驱动装置3驱动吹扫装置2转动;转动驱动装置3的设置可以根据实际吹扫位置高度等情况进行转动吹扫装置2,来适应实际高度,避免上部空间比较小时吹扫装置2的吹风口无法到达钢梁顶面。
43.所述吹扫装置2包括安装板2-1、两组输送装置2-2和两组吹扫机构2-3,两组所述输送装置2-2分别设于安装板2-1底面两侧,两组所述吹扫机构2-3分别设置于两组输送装置2-2 上,且两组所述吹扫机构2-3对称设置,两组所述输送装置2-2分别驱动两组吹扫机构2-3相向或相对移动;对称排列方式的设置,起到抵消反扭的作用,从而增大空气流速产生射流动力能,提升了效率。输送装置2-2根据要吹扫的两组钢梁之间的距离进行调整两组吹扫机构 2-3之间的距离,便于吹扫装置2同时可以进行两组钢梁的吹扫,提高吹扫效率。
44.所述吹扫机构2-3包括吹扫风管2-3-1、涵道风机2-3-2和出风装置2-3-3,所述吹扫风管 2-3-1上端为进风口,所述涵道风机2-3-2固定设置于吹扫风管2-3-1的进风口处,所述吹扫风管2-3-1下端为出风口,所述出风装置2-3-3固定设置于吹扫风管2-3-1的出风口处;所述控制系统分别与无人机1、输送装置2-2、涵道风机2-3-2、转动驱动装置3和监控系统之间电气连接。
45.进一步,所述转动驱动装置3包括两组转动驱动电机3-1和两组转动轴3-2,两组所述转动轴3-2平行转动设于无人机1底部固定板1-1的底面前后两侧,两组所述转动驱动电机3-1 分别同轴设于两组转动轴3-2一侧,且所述转动驱动电机3-1的输出端与其相对应的一组转动轴3-2的一端固定连接;转动驱动电机3-1驱动转动轴3-2转动。
46.所述转动轴3-2两侧固定设置有连接杆3-3,所述连接杆3-3底端与安装板2-1顶面铰接,所述转动驱动电机3-1驱动转动轴3-2转动进而实现吹扫装置2转动。连接杆3-3顶端与转动轴3-2之间固定连接,转动轴3-2的转动带动连接杆3-3进行转动,连接杆3-3底端与安装板 2-1顶面铰接的设置可以使得连接杆3-3转动时安装板2-1跟随其进行位置的变动来适应钢梁的位置2-3-1。
47.进一步,所述输送装置2-2包括直线模组2-2-1和中部固定设于直线模组2-2-1的滑块上的滑动板2-2-2,所述直线模组2-2-1沿左右方向固定安装于安装板2-1底面一侧中部,所述直线模组2-2-1前后两侧的安装板2-1底面对称设置有形输送板2-2-3,所述形输送板2-2-3底面内端设置有挡板2-2-4,所述形输送板2-2-3和挡板2-2-4之间为输送槽2-2-5;所述滑动板2-2-2为倒“凵”形结构,所述滑动板2-2-2的两侧壁内壁上分别转动设置有两组输送轮2-2-6,设于两侧的所述输送轮2-2-6分别设于与其同侧的输送槽2-2-5中;直线模组2-2-1工作时,滑块带动滑动板2-2-2往复运动,滑动板2-2-2前后两侧的输送轮2-2-6 在输送槽2-2-5中滑动,输送轮2-2-6的设置即增加了滑动的顺利性也保证了滑动时滑动板 2-2-2的稳定性。
48.所述涵道风机2-3-2前后两侧通过固定杆2-3-4固定安装于滑动板2-2-2底面,所述直线模组2-2-1通过驱动滑动板2-2-2移动带动吹扫机构2-3移动。固定杆2-3-4的顶端与安装板 2-1底面固定连接,固定杆2-3-4底端与涵道风机2-3-2中涵道2-3-5两侧设置的固定块连接。
49.进一步,所述涵道风机2-3-2包括涵道2-3-5、设于涵道2-3-5内的风扇2-3-6和风扇驱动电机2-3-7,所述风扇驱动电机2-3-7同轴固定设于涵道2-3-5后侧,所述风扇2-3-6同轴固定设于风扇驱动电机2-3-7的输出端,所述风扇驱动电机2-3-7驱动风扇2-3-6转动,所述风扇 2-3-6前侧的涵道2-3-5内固定设置有整流罩2-3-8,所述涵道2-3-5后端与吹扫风管2-3-1的进风口同轴固定连接。整流罩2-3-8的设置使得进入风扇2-3-6中的风是均匀的,可以保证吹扫过程中吹扫风管2-3-1的稳定性。
50.进一步,所述涵道2-3-5前端设置有过滤仓2-3-9,所述过滤仓2-3-9为空心的圆柱体结构,且所述过滤仓2-3-9水平设置,所述过滤仓2-3-9包括圆柱侧壁2-3-10、设于圆柱侧壁2-3-10 内侧的内侧壁2-3-11和设于圆柱侧壁2-3-10外侧的外侧壁2-3-12,所述圆柱侧壁2-3-10和内侧壁2-3-11上均设置有若干组第一过滤孔2-3-13,所述外侧壁2-3-12上设置有若干组第二过滤孔2-3-14,所述第二过滤孔2-3-14的直径尺寸大于第一过滤孔2-3-13的直径尺寸。过滤仓 2-3-9的设置可以在风进入之前先进行清洁过滤,避免将灰尘进入吹扫风管2-3-1中时间过长后影响吹扫效率,灰尘在通过第二过滤孔2-3-14后落在过滤仓2-3-9中,由于第一过滤孔2-3-13 的直径很小,灰尘无法再跟随其进入内部,即进行了灰尘的收集,吹扫完毕后人工进行过滤仓2-3-9内积攒灰尘的处理。
51.进一步,所述风扇驱动电机2-3-7为无刷电机。无刷电机具有长寿命,高转速的特性能够提升更大的吹力。
52.进一步,所述出风装置2-3-3包括锥形出风管2-3-15和设于锥形出风管2-3-15小端处的扁平状出风端2-3-16,锥形和扁平状的设置,可以使得出风更加集中,更方便顶面为水平的钢梁的清洁。所述出风装置2-3-3包括锥形出风管2-3-15和设于锥形出风管2-3-15小端处的扁平状出风端2-3-16;所述锥形出风管2-3-15为锥形波纹管结构,波纹管结构的设置便于锥形出风管2-3-15进行改变方向,所述出风装置2-3-3处设置有出风方向调节装置2-3-20,出风方向调节装置2-3-20用于根据工厂实际吹扫位置情况,进行扁平状出风端2-3-16的朝向调整,可以水平朝外,也可以竖直向下,或者可以倾斜吹扫。所述出风方向调节装置2-3-20包括固定安装板2-3-21、转动安装板2-3-22、弧形齿条2-3-23、驱动齿轮2-3-24和齿轮驱动电机2-3-25,所述固定安装板2-3-21中部设置有第一过孔2-3-26,所述固定安装板2-3-21固定设于吹扫风管2-3-1的出风口处,所述第一过孔2-3-26与吹扫风管2-3-1连通,所述锥形出风管2-3-15的大端处连接于第一过孔2-3-26处;
53.所述转动安装板2-3-22下部设置有第二过孔2-3-27,且所述转动安装板2-3-22上部设置有电机安装槽2-3-28,所述转动安装板2-3-22固定设于锥形出风管2-3-15的小端处,所述弧形齿条2-3-23一端固定设于固定安装板2-3-21上部,所述弧形齿条2-3-23另一端穿过所述电机安装槽2-3-28;所述齿轮驱动电机2-3-25水平设于电机安装槽2-3-28中,齿轮驱动电机 2-3-25固定设置,在其启动时,才会保证转动安装板2-3-22随其移动。所述驱动齿轮2-3-24 同轴固定设于齿轮驱动电机2-3-25的输出端处,且所述驱动齿轮2-3-24与弧形齿条2-3-23相啮合;所述齿轮驱动电机2-3-25带动驱动齿轮2-3-24沿弧形齿条2-3-23转动,进而使转动安装板2-3-22转动改变扁平状出风端2-3-16的出风方向。齿轮驱动电机2-3-25与控制系统电气连接,在需要向下吹风时,控制系统控制齿轮驱动电机2-3-25工作,带动驱动齿轮2-3-24转动,在其与弧形齿条2-3-23的啮合传动作用下,扁平状出风端2-3-16沿弧形齿条2-3-23移动,直至其开口向下。
54.进一步,所述吹扫风管2-3-1包括竖直设置的竖直风管2-3-17、设于竖直风管2-3-17顶端的进口水平风管2-3-18和设于竖直风管2-3-17底端的出口水平风管2-3-19,所述进口水平风管2-3-18和出口水平风管2-3-19设置为相反方向,所述进口水平风管的外端与涵道风机 2-3-2连接,所述出口水平风管2-3-19的外端与出风装置2-3-3连接。吹扫风管2-3-1形状的设置可以扩大两侧的吹扫间距,可以适应更大间距的钢梁吹扫。
55.进一步,所述监控系统包括设于无人机1上的红外视觉传感器、超声波传感器和激光雷达传感器;监控系统使得无人机1在行驶过程中进行避障,所述控制系统包括控制器和遥控器,所述遥控器和控制器之间电气连接。
56.进一步,所述无人机1为系留无人机。系留无人机使用通过系留线缆传输的地面电源作为动力来源,代替传统的锂电池,具有长时间的滞空悬停能力。
57.在对工厂钢梁进行定期吹扫时,人工控制无人机1带动吹扫还在那钢制2进行移动到待清理位置处,控制器控制涵道风机2-3-2工作,风经过过滤后经过吹扫风管2-3-1和出风装置 2-3-3后吹向钢梁,进行吹扫工作的完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1