一种无人机机载识别跟踪器的制作方法
1.本实用新型属于识别摄像头技术领域,具体涉及一种无人机机载识别跟踪器。
背景技术:
2.无人机(unmanned aerial vehicle)是一种有动力、可控制、能重复使用的无人驾 驶航行器,具有低成本、高效能、机动灵活等优势,最初以军用为主,近年来,随着无人机的发展,其制造成本大大降低,稳定性和可靠性得到显著提高。小型、轻便、可操控的小型无人机正被广泛的应用于民用领域
3.随着科技的发展,无人机机载跟踪器相关装置有了很大程度的发展,它的发展给人们在对地面物体进行高空探测时带来了很大的便利,其种类和数量也正在与日俱增。
4.现有的机载摄像头一般都是直接固定在无人机上,无法对特定目标进行角度调整,从而易丢失目标,因此还存在角度调整不便的问题。
技术实现要素:
5.本实用新型的目的在于提供一种无人机机载识别跟踪器,旨在解决现有技术中的角度调整不便的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种无人机机载识别跟踪器,包括底板,所述底板的上端转动连接有轴杆,所述轴杆的上端固定连接有固定板,所述固定板的下内壁固定连接有第二电机,所述第二电机的输出轴固定连接有第三齿轮,所述固定板的左右内壁转动连接有转杆,所述转杆活动贯穿于固定板的左右两端并向外延伸,所述转杆的左右两端固定连接有角度调节板,所述转杆的圆周表面固定连接有第四齿轮,所述第四齿轮与第三齿轮啮合传动连接。
8.作为本实用新型一种优选的方案,所述底板的上端固定连接有第一电机,所述第一电机的输出轴固定连接有蜗杆,所述轴杆的圆周表面固定连接有蜗轮,所述蜗轮与蜗杆啮合传动连接。
9.作为本实用新型一种优选的方案,所述底板的上端固定连接有四个固定杆,所述固定板的下端开凿有滑槽,四个所述固定杆的上端固定连接有滑块,所述滑块滑动连接于滑槽的内壁。
10.作为本实用新型一种优选的方案,所述角度调节板的上端固定连接有摄像头。
11.作为本实用新型一种优选的方案,所述第一电机的高度不高于底板与固定板之间的距离,且第一电机和第二电机与外部遥控器电性连接。
12.作为本实用新型一种优选的方案,所述摄像头的内部设有可选定焦摄像头模组。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本实用通过设置的第三齿轮和第四齿轮,通过第三齿轮与第四齿轮的啮合传动连接关系,即可通过第二电机的转动使角度调节板进行前后角度的调整,并且角度调节板的设置不与固定板的形状相冲突,可以使角度调节板的转动方向达到
°
,以满足大多数情况
下需要转动的角度,从而达到了在无人机飞行时摄像头始终锁定某一目标的功能。
15.2、本实用通过设置的轴杆、蜗杆和蜗轮,通过蜗杆与蜗轮的啮合传动连接关系,可通过第一电机的转动使轴杆进行圆周运动,带动固定连接在轴杆上端的固定板进行圆周运动,使固定板上部的部件进行旋转,从而使摄像头做圆周运动,达到了进一步增大可调节角度的功能。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
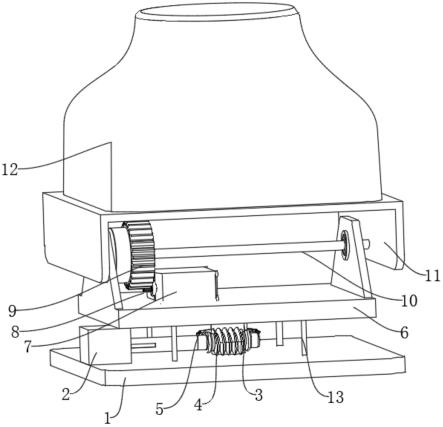
17.图1为本实用新型的主视立体图;
18.图2为本实用新型中的后视立体图;
19.图3为本实用新型中的局部剖面图。
20.图中:1、底板;2、第一电机;3、轴杆;4、蜗杆;5、蜗轮;6、固定板;7、第二电机;8、第三齿轮;9、第四齿轮;10、转杆;11、角度调节板;12、摄像头;13、固定杆;14、滑槽;15、滑块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例1
23.请参阅图1-3,本实用新型提供以下技术方案:
24.一种无人机机载识别跟踪器,包括底板1,底板1的上端转动连接有轴杆3,轴杆3的上端固定连接有固定板6,固定板6的下内壁固定连接有第二电机7,第二电机7的输出轴固定连接有第三齿轮8,固定板6的左右内壁转动连接有转杆10,转杆10活动贯穿于固定板6的左右两端并向外延伸,转杆10的左右两端固定连接有角度调节板11,转杆10的圆周表面固定连接有第四齿轮9,第四齿轮9与第三齿轮8啮合传动连接。
25.在本实用新型的具体实施例中,通过第三齿轮8与第四齿轮9的啮合传动连接关系,即可通过第二电机7的转动使角度调节板11进行前后角度的调整,并且角度调节板11的设置不与固定板6的形状相冲突,可以使角度调节板11的转动方向达到270
°
,以满足大多数情况下需要转动的角度,第二电机7可以根据实际需求选择不同的型号,例如选择型号为yy5034,第二电机7与外部电源电性连接,对于本领域技术人员而言,上述电机为现有技术,在此不做过多赘述。
26.具体的请参阅图1和图2,底板1的上端固定连接有第一电机2,第一电机2的输出轴固定连接有蜗杆4,轴杆3的圆周表面固定连接有蜗轮5,蜗轮5与蜗杆4啮合传动连接。
27.本实施例中:通过蜗杆4与蜗轮5的啮合传动连接关系,可通过第一电机2的转动使轴杆3进行圆周运动,带动固定连接在轴杆3上端的固定板6进行圆周运动,使固定板6上部的部件进行旋转,从而使摄像头12做圆周运动,达到了进一步增大可调节角度的功能,第一电机2可以根据实际需求选择不同的型号,例如选择型号为yy5035,第一电机2与外部电源
电性连接,对于本领域技术人员而言,上述电机为现有技术,在此不做过多赘述。
28.具体的请参阅图1和图3,底板1的上端固定连接有四个固定杆13,固定板6的下端开凿有滑槽14,四个固定杆13的上端固定连接有滑块15,滑块15滑动连接于滑槽14的内壁。
29.本实施例中:四个固定杆13的上端固定连接有滑块15,滑块15滑动连接于滑槽14的内壁,通过此设置即可使固定板6的转动更加平稳,从而使本实用在无人机飞行中调整角度时可保持平稳。
30.具体的请参阅图1和图2,角度调节板11的上端固定连接有摄像头12。
31.本实施例中:摄像头12的功能为:目标识别,识别出场景内的车辆、人员多目标跟踪,对识别出来的特定目标锁定并进行跟踪,并且输出每个目标的id以及画面位置、尺寸,能够融合可见光和红外实现多源目标识别多目标聚集检测:检测物理空间上的目标集群并且输出画面位置、数量、区域 单目标可靠跟踪:对单个目标进行长期稳定跟踪。
32.具体的请参阅图1和图2,第一电机2的高度不高于底板1与固定板6之间的距离,且第一电机2和第二电机7与外部遥控器电性连接。
33.本实施例中:第一电机2的高度不高于底板1与固定板6之间的距离,防止固定板6在调整角度时误碰到第一电机2。
34.具体的请参阅图1和图2,摄像头12的内部设有可选定焦摄像头模组。
35.本实施例中:可选定焦摄像头模组可提供软件以及算法动态链接库,可供二次开发提供软件接口通讯协议提供硬件接口通讯协议提供用于目标检测的神经网络模型 提供数据标注。
36.本实用新型的工作原理及使用流程:通过蜗杆4与蜗轮5的啮合传动连接关系,可通过第一电机2的转动使轴杆3进行圆周运动,带动固定连接在轴杆3上端的固定板6进行圆周运动,使固定板6上部的部件进行旋转,从而使摄像头12做圆周运动,达到了增大可调节角度的功能,通过第三齿轮8与第四齿轮9的啮合传动连接关系,即可通过第二电机7的转动使角度调节板11进行前后角度的调整,并且角度调节板11的设置不与固定板6的形状相冲突,可以使角度调节板11的转动方向达到270
°
,以满足大多数情况下需要转动的角度,从而达到了在无人机飞行时摄像头12始终锁定某一目标的功能,四个固定杆13的上端固定连接有滑块15,滑块15滑动连接于滑槽14的内壁,通过此设置即可使固定板6的转动更加平稳,从而使本实用在无人机飞行中调整角度时可保持平稳。
37.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1