一种无人机水平尾翼的全动机构的制作方法
1.本实用新型涉及飞行器及机械设计技术领域,具体涉及一种无人机水平尾翼的全动机构。
背景技术:
2.传统的平尾都是由固定的水平安定面和可偏转的升降舵组成。随着无人机技术的发展,部分无人机开始采用全动平尾。全动平尾是将飞机的水平安定面和升降舵合二为一的部件,它通过转轴与机身结合,操作者或飞控程序可以控制整个平尾偏转,这使得飞机的操纵性能大大提高。
3.但是现有技术中,平尾与无人机机身之间间隙大、有虚位,同时还会破坏无人机的气动外形,对飞行性能产生负面影响。因此,需要研发一种无人机水平尾翼的全动机构。
技术实现要素:
4.本实用新型的目的是提供一种无人机水平尾翼的全动机构,以解决上述问题。
5.为了实现上述目的,本实用新型实施例提供了一种无人机水平尾翼的全动机构,包括:
6.机身本体、两平尾和驱动部,两所述平尾可转动的设置在所述机身本体两侧,且所述平尾设置在所述机身本体外壁的尾部;
7.所述驱动部固定在所述机身本体内部,且所述驱动部与所述平尾联动;其中
8.驱动部工作时能够驱动两平尾绕机身本体转动以控制平尾偏转。
9.作为优选,两平尾对称设置在所述机身本体的两侧,且两平尾与机身本体之间通过一转轴连接,两平尾分别固定在所述转轴的两端,且所述平尾靠近机身本体的一侧与机身本体侧壁相适配;
10.所述转轴外壁套设有一轴承,所述轴承的外圈固定在所述机身本体上;其中
11.转动所述转轴时能够驱动两平尾以转轴为轴转动。
12.作为优选,所述驱动部包括:舵机和连接杆,所述舵机固定在所述机身本体内部,所述连接杆一端与舵机输出轴固定连接,所述连接杆另一端与转轴固定连接;其中
13.舵机工作时能够驱动所述连接杆在舵机和转轴之间往复移动以驱动转轴圆弧状转动。
14.作为优选,所述舵机输送轴外壁套定有一摇臂,所述摇臂端部与所述连接杆一端铰接,舵机驱动摇臂轴向转动时,所述摇臂能驱动所述连接杆往复水平移动。
15.作为优选,所述转轴外壁套定有一舵角,所述舵角端部铰接在所述连接杆的另一端;舵机驱动连接杆水平往复移动时能够通过所述舵角驱动转轴圆弧转动。
16.作为优选,所述机身本体外壁尾部还固定有一垂尾,所述垂尾与所述平尾互相垂直,且所述垂尾设置在所述机身本体下方。
17.相对于现有技术,本实用新型实施例具有以下有益效果:一种无人机水平尾翼的
全动机构,通过在无人机本体的外壁尾部设置平尾、转轴和舵机的配合,通过舵机的工作来达到控制转轴的转动,而通过转轴带动平尾转动来达到控制平尾的偏转,而且平尾与机身本体之间通过转轴连接,配合间隙小,无虚位;本实用结构简单,易加工,同时平尾沿转轴可转动的设计还不会破坏机身本体的气动外形,不会对飞行性能产生负面影响。
附图说明
18.下面结合附图和实施例对本实用新型进一步说明。
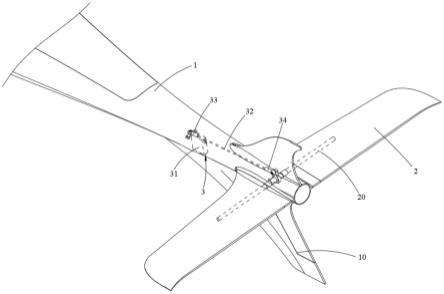
19.图1示出了本实用新型的一种无人机水平尾翼的全动机构立体图。
20.图中:
21.1、机身本体;10、垂尾;2、平尾;20、转轴;3、驱动部;31、舵机;32、连接杆;33、摇臂;34、舵角。
具体实施方式
22.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
23.如图1所示,本实用新型提供了一种无人机水平尾翼的全动机构,包括:机身本体1、两平尾2和驱动部3,两所述平尾2可转动的设置在所述机身本体1两侧,且所述平尾2设置在所述机身本体1外壁的尾部;所述驱动部3固定在所述机身本体1内部,且所述驱动部3与所述平尾2联动;其中驱动部3工作时能够驱动两平尾2绕机身本体1转动以控制两平尾2同步偏转。本实用新型结构简单,易加工,平尾2与机身本体1之间仅通过转轴20配合,这样的设计配合间隙小、无虚位。驱动部3工作时驱动两平尾2同时绕机身本体1圆弧转动,以控制平尾2的偏转,大大提高了无人机的操纵性能。
24.可选的,两平尾2对称设置在所述机身本体1的两侧,且两平尾2与机身本体1之间通过一转轴20连接,转轴20的设置,使得量平尾2与机身本体1之间配合间隙最小,在转轴20轴向转动的时候能够控制两平尾2同步发生偏转;同时平尾2固定在转轴20的两端,这样平尾2和机身本体1之间的配合无虚位;两平尾2分别固定在所述转轴20的两端,且所述平尾2靠近机身本体1的一侧与机身本体1侧壁相适配,平尾2靠近机身本体1的一侧与机身本体1的侧壁相适配,这样在调节平尾2以转轴20为轴圆弧转动的过程中,两平尾2不会破坏机身本体1的气动外形,不会对机身本体1飞行性能产生负面影响;所述转轴20外壁套设有一轴承,所述轴承的外圈固定在所述机身本体1上;其中转动所述转轴20时能够驱动两平尾2以转轴20为轴转动。工作时,转动所述转轴20,所述转轴20同步驱动两平尾2圆弧转动,从而实现了控制平尾2的偏转的效果,而将平尾2设计成全动平尾2的设计,大大提高了无人机的操纵性能。
25.优选的,所述驱动部3包括:舵机31和连接杆32,所述舵机31固定在所述机身本体1内部,所述舵机31为电动舵机31,所述舵机31适于驱动连接杆32往复水平移动。所述连接杆32一端与舵机31输出轴固定连接,所述连接杆32另一端与转轴20固定连接;其中舵机31工作时能够驱动所述连接杆32在舵机31和转轴20之间往复移动以驱动转轴20圆弧状转动。舵机31和连接杆32都设置在机身本体1内,而通过转轴20与两平尾2连接,这样两平尾2与机身本体1的配合间隙达到最小,通过舵机31的工作来控制转轴20转动,从而达到使得平尾2偏
转的效果,在不破坏机身本体1外形气动外形的基础上,提高了无人机的操纵性能。
26.可选的,所述舵机31输送轴外壁套定有一摇臂33,所述摇臂33端部与所述连接杆32一端铰接,舵机31驱动摇臂33轴向转动时,所述摇臂33能驱动所述连接杆32往复水平移动。通过所述摇臂33能够将舵机31的轴向转动转换成连接杆32的的水平往复移动;所述转轴20外壁套定有一舵角34,所述舵角34端部铰接在所述连接杆32的另一端,所述舵角34能够将连接杆32的水平移动转变成转轴20的圆弧转动;舵机31驱动连接杆32水平往复移动时能够通过所述舵角34驱动转轴20圆弧转动。所述机身本体1外壁尾部还固定有一垂尾10,所述垂尾10与所述平尾2互相垂直,且所述垂尾10设置在所述机身本体1下方,所述垂尾10在机身本体1飞行过程中,起到平行性能。
27.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种无人机水平尾翼的全动机构,其特征在于,包括:机身本体、两平尾和驱动部,两所述平尾可转动的设置在所述机身本体两侧,且所述平尾设置在所述机身本体外壁的尾部;所述驱动部固定在所述机身本体内部,且所述驱动部与所述平尾联动;其中驱动部工作时能够驱动两平尾绕机身本体转动以控制平尾偏转。2.如权利要求1所述的一种无人机水平尾翼的全动机构,其特征在于,两平尾对称设置在所述机身本体的两侧,且两平尾与机身本体之间通过一转轴连接,两平尾分别固定在所述转轴的两端,且所述平尾靠近机身本体的一侧与机身本体侧壁相适配;所述转轴外壁套设有一轴承,所述轴承的外圈固定在所述机身本体上;其中转动所述转轴时能够驱动两平尾以转轴为轴转动。3.如权利要求2所述的一种无人机水平尾翼的全动机构,其特征在于,所述驱动部包括:舵机和连接杆,所述舵机固定在所述机身本体内部,所述连接杆一端与舵机输出轴固定连接,所述连接杆另一端与转轴固定连接;其中舵机工作时能够驱动所述连接杆在舵机和转轴之间往复移动以驱动转轴圆弧状转动。4.如权利要求3所述的一种无人机水平尾翼的全动机构,其特征在于,所述舵机输送轴外壁套定有一摇臂,所述摇臂端部与所述连接杆一端铰接,舵机驱动摇臂轴向转动时,所述摇臂能驱动所述连接杆往复水平移动。5.如权利要求4所述的一种无人机水平尾翼的全动机构,其特征在于,所述转轴外壁套定有一舵角,所述舵角端部铰接在所述连接杆的另一端;舵机驱动连接杆水平往复移动时能够通过所述舵角驱动转轴圆弧转动。6.如权利要求5所述的一种无人机水平尾翼的全动机构,其特征在于,所述机身本体外壁尾部还固定有一垂尾,所述垂尾与所述平尾互相垂直,且所述垂尾设置在所述机身本体下方。
技术总结
本实用新型涉及飞行器及机械设计技术领域,具体涉及一种无人机水平尾翼的全动机构,包括:机身本体、两平尾和驱动部,两所述平尾可转动的设置在所述机身本体两侧,且所述平尾设置在所述机身本体外壁的尾部;所述驱动部固定在所述机身本体内部,且所述驱动部与所述平尾联动;其中驱动部工作时能够驱动两平尾绕机身本体转动以控制机身本体偏转。本实用新型结构简单,易加工,平尾与机身之间容易做到配合间隙小、无虚位;平尾通过转轴与机身本体连接,不仅不破坏无人机的气动外形,不对无人机的飞行性能产生负面影响,同时驱动部驱动转轴转动还可以提高无人机的操纵性能。可以提高无人机的操纵性能。可以提高无人机的操纵性能。
技术研发人员:王川 杨希望 张佳奇
受保护的技术使用者:天峋创新(北京)科技有限公司
技术研发日:2022.03.28
技术公布日:2022/7/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1