一种可实现同步控制的可编程控制器及配置方法与流程
[0001]
本发明涉及智能制造领域。本发明具体涉及了可实现同步控制的可编程控制器及配置方法。
背景技术:
[0002]
现有的伺服电机的控制通孔为单独的电机控制,即一个控制器通常驱动一个伺服电机。多伺服电机同时驱动时,多采用多控制器。当需要其伺服电机输出轴能够跟随或配合运动时,则需要设置每个电机控制器单独调试,从而增加了自动化生成线的维修成本,降低了使用效率。
技术实现要素:
[0003]
本发明的目的是提供可实现同步控制的可编程控制器,通过对放线架和收线架转角信息的采集,对不同步电机调节,从而保证其转动的同步性,降低自动化线缆生产设备的调试周期及成本。
[0004]
本发明的另一目的是提供可实现同步控制的可编程控制器的配置方法,其利于实施,通过实施速度及比较的方式,保证伺服控制的同步性及准确性。
[0005]
本发明中的一种可实现同步控制的可编程控制器,可实现同步控制的可编程控制器能够驱动一个放线架和一个收线架。可实现同步控制的可编程控制器能够通过单一片上系统芯片实现。单一片上系统芯片具有一个主处理器:
[0006]
放线架包括:
[0007]
一个放线架体,其能够设置于一个支撑面。
[0008]
一个放线轮,其能够沿一个第一回转轴线顺时针转动的设置于放线架体。第一回转轴线平行于支撑面。放线轮的外周向能够缠绕电线。当放线轮转动时,电线能够沿一个放线方向脱离放线轮的外周向。
[0009]
一个第一计数盘,其于放线轮同轴且固定设置。第一计数盘的外周向从放线轮的径向延出。在第一计数盘的延出部分绕第一回转轴线均匀开设多个通孔。
[0010]
一个第一伺服电机,其输出轴能够驱动放线轮绕第一回转轴线转动。
[0011]
一个第一红外传感器,其设置于放线架体且感应端能够位于于通孔的延伸方向。当放线轮转动时,第一红外传感器能够获取放线轮的转动角度信息。第一红外传感器的输出端能够输出放线端转角信息。
[0012]
收线架包括:
[0013]
一个收线架体,其能够设置于支撑面。
[0014]
一个收线轮,其能够沿一个第二回转轴线顺时针转动的设置于收线架体。第二回转轴线平行于第一回转轴线。收线轮的外周向能够缠绕从放线轮沿放线方向脱离的电线。当收线轮转动时,电线能够沿一个收线方向缠绕于收线轮的外周向。
[0015]
一个第二计数盘,其于收线轮同轴且固定设置。第二计数盘的外周向从收线轮的
径向延出。在第二计数盘的延出部分绕第二回转轴线均匀开设多个通孔。
[0016]
一个第二伺服电机,其输出轴能够驱动收线轮绕第二回转轴线转动。
[0017]
一个第二红外传感器,其设置于收线架体且感应端能够位于于通孔的延伸方向。当收线轮转动时,第二红外传感器能够获取收线轮的转动角度信息。第二红外传感器的输出端能够输出收线端转角信息。
[0018]
主处理器配置为,获取放线端转角信息及收线端转角信息的当前转角差值。若当前转角差值大于设定转角差值,则根据当前转角差值校正作为第二伺服电机的伺服校正量驱动第二伺服电机。
[0019]
在本发明的另一种实施方式中,放线端转角信息中包括放线轮标识信息。收线端转角信息中包括收线轮标识信息。
[0020]
在本发明的另一种实施方式中,包括:多个输入接口及多个输出接口。多个输入接口及多个输出接口分别与主处理器的数据端口连接。
[0021]
在本发明的另一种实施方式中,还包括:一个输入装置,其与输入接口连接获取设定转角差值。
[0022]
在本发明的另一种实施方式中,还包括:一个显示装置,其与输出接口连接且能够输出当前转角差值、放线轮标识信息及收线轮标识信息。
[0023]
同时,本发明还提供了可编程控制器的配置方法,可实现同步控制的可编程控制器能够驱动一个放线架和一个收线架。可实现同步控制的可编程控制器能够通过单一片上系统芯片实现。单一片上系统芯片具有一个主处理器:
[0024]
放线架包括:
[0025]
一个放线架体,其能够设置于一个支撑面。
[0026]
一个放线轮,其能够沿一个第一回转轴线顺时针转动的设置于放线架体。第一回转轴线平行于支撑面。放线轮的外周向能够缠绕电线。当放线轮转动时,电线能够沿一个放线方向脱离放线轮的外周向。
[0027]
一个第一计数盘,其于放线轮同轴且固定设置。第一计数盘的外周向从放线轮的径向延出。在第一计数盘的延出部分绕第一回转轴线均匀开设多个通孔。
[0028]
一个第一伺服电机,其输出轴能够驱动放线轮绕第一回转轴线转动。
[0029]
一个第一红外传感器,其设置于放线架体且感应端能够位于于通孔的延伸方向。当放线轮转动时,第一红外传感器能够获取放线轮的转动角度信息。第一红外传感器的输出端能够输出放线端转角信息。
[0030]
收线架包括:
[0031]
一个收线架体,其能够设置于支撑面。
[0032]
一个收线轮,其能够沿一个第二回转轴线顺时针转动的设置于收线架体。第二回转轴线平行于第一回转轴线。收线轮的外周向能够缠绕从放线轮沿放线方向脱离的电线。当收线轮转动时,电线能够沿一个收线方向缠绕于收线轮的外周向。
[0033]
一个第二计数盘,其于收线轮同轴且固定设置。第二计数盘的外周向从收线轮的径向延出。在第二计数盘的延出部分绕第二回转轴线均匀开设多个通孔。
[0034]
一个第二伺服电机,其输出轴能够驱动收线轮绕第二回转轴线转动。
[0035]
一个第二红外传感器,其设置于收线架体且感应端能够位于于通孔的延伸方向。
当收线轮转动时,第二红外传感器能够获取收线轮的转动角度信息。第二红外传感器的输出端能够输出收线端转角信息。
[0036]
主处理器配置为,获取放线端转角信息及收线端转角信息的当前转角差值。若当前转角差值大于设定转角差值,则根据当前转角差值校正作为第二伺服电机的伺服校正量驱动第二伺服电机。
[0037]
在本发明的另一种实施方式中,放线端转角信息中包括放线轮标识信息。收线端转角信息中包括收线轮标识信息。
[0038]
在本发明的另一种实施方式中,包括:多个输入接口及多个输出接口。多个输入接口及多个输出接口分别与主处理器的数据端口连接。
[0039]
在本发明的另一种实施方式中,还包括:一个输入装置,其与输入接口连接获取设定转角差值。
[0040]
在本发明的另一种实施方式中,还包括:一个显示装置,其与输出接口连接且能够输出当前转角差值、放线轮标识信息及收线轮标识信息。
[0041]
下文将以明确易懂的方式,结合附图对可实现同步控制的可编程控制器及配置方法的特性、技术特征、优点及其实现方式予以进一步说明。
附图说明
[0042]
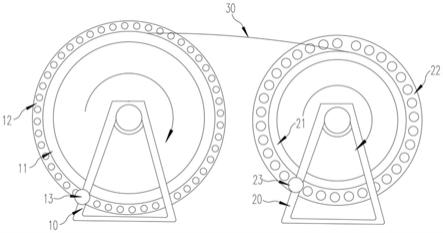
图1是用于说明在本发明的一种实施方式中,放线轮及收线轮的结构示意图。
[0043]
图2是用于说明在本发明一种实施方式中,一种可实现同步控制的可编程控制器的系统结构示意图。
[0044]
图3是用于说明在本发明另一种实施方式中,一种可实现同步控制的可编程控制器的系统结构示意图。
具体实施方式
[0045]
为了对发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式,在各图中相同的标号表示结构相同或结构相似但功能相同的部件。
[0046]
在本文中,“示意性”表示“充当实例、例子或说明”,不应将在本文中被描述为“示意性”的任何图示、实施方式解释为一种更优选的或更具优点的技术方案。为使图面简洁,各图中只示意性地表示出了与本示例性实施例相关的部分,它们并不代表其作为产品的实际结构及真实比例。
[0047]
本发明中的一种可实现同步控制的可编程控制器,可实现同步控制的可编程控制器能够驱动一个放线架和一个收线架。可实现同步控制的可编程控制器能够通过单一片上系统芯片实现。单一片上系统芯片具有一个主处理器301。
[0048]
如图1、2所示,放线架包括:
[0049]
一个放线架体10,其能够设置于一个支撑面。
[0050]
一个放线轮11,其能够沿一个第一回转轴线顺时针转动的设置于放线架体10。第一回转轴线平行于支撑面。放线轮11的外周向能够缠绕电线30。当放线轮11转动时,电线30能够沿一个放线方向脱离放线轮11的外周向。
[0051]
一个第一计数盘12,其于放线轮11同轴且固定设置。第一计数盘12的外周向从放
线轮11的径向延出。在第一计数盘12的延出部分绕第一回转轴线均匀开设多个通孔。
[0052]
一个第一伺服电机101,其输出轴能够驱动放线轮11绕第一回转轴线转动。
[0053]
一个第一红外传感器13,其设置于放线架体10且感应端能够位于于通孔的延伸方向。当放线轮11转动时,第一红外传感器13能够获取放线轮11的转动角度信息。第一红外传感器13的输出端能够输出放线端转角信息。
[0054]
收线架包括:
[0055]
一个收线架体20,其能够设置于支撑面。
[0056]
一个收线轮21,其能够沿一个第二回转轴线顺时针转动的设置于收线架体20。第二回转轴线平行于第一回转轴线。收线轮21的外周向能够缠绕从放线轮11沿放线方向脱离的电线30。当收线轮21转动时,电线30能够沿一个收线方向缠绕于收线轮21的外周向。
[0057]
一个第二计数盘22,其于收线轮21同轴且固定设置。第二计数盘22的外周向从收线轮21的径向延出。在第二计数盘22的延出部分绕第二回转轴线均匀开设多个通孔。
[0058]
一个第二伺服电机201,其输出轴能够驱动收线轮21绕第二回转轴线转动。
[0059]
一个第二红外传感器23,其设置于收线架体20且感应端能够位于于通孔的延伸方向。当收线轮21转动时,第二红外传感器23能够获取收线轮21的转动角度信息。第二红外传感器23的输出端能够输出收线端转角信息。
[0060]
主处理器301配置为,获取放线端转角信息及收线端转角信息的当前转角差值。若当前转角差值大于设定转角差值,则根据当前转角差值校正作为第二伺服电机201的伺服校正量驱动第二伺服电机201。
[0061]
从而实现对电线的成捆缠绕使,可使电线不受到外接拉力,保证电线在缠绕时机械性能的稳定。
[0062]
在本发明的另一种实施方式中,放线端转角信息中包括放线轮11标识信息。收线端转角信息中包括收线轮21标识信息。
[0063]
在本发明的另一种实施方式中,包括:多个输入接口及多个输出接口。多个输入接口及多个输出接口分别与主处理器301的数据端口连接。
[0064]
如图2所示,在本发明的另一种实施方式中,还包括:一个输入装置401,其与输入接口连接获取设定转角差值。
[0065]
如图2所示,在本发明的另一种实施方式中,还包括:一个显示装置501,其与输出接口连接且能够输出当前转角差值、放线轮11标识信息及收线轮21标识信息。
[0066]
同时,本发明还提供了可编程控制器的配置方法,可实现同步控制的可编程控制器能够驱动一个放线架和一个收线架。可实现同步控制的可编程控制器能够通过单一片上系统芯片实现。单一片上系统芯片具有一个主处理器301:
[0067]
放线架包括:
[0068]
一个放线架体10,其能够设置于一个支撑面。
[0069]
一个放线轮11,其能够沿一个第一回转轴线顺时针转动的设置于放线架体10。第一回转轴线平行于支撑面。放线轮11的外周向能够缠绕电线30。当放线轮11转动时,电线30能够沿一个放线方向脱离放线轮11的外周向。
[0070]
一个第一计数盘12,其于放线轮11同轴且固定设置。第一计数盘12的外周向从放线轮11的径向延出。在第一计数盘12的延出部分绕第一回转轴线均匀开设多个通孔。
[0071]
一个第一伺服电机101,其输出轴能够驱动放线轮11绕第一回转轴线转动。
[0072]
一个第一红外传感器13,其设置于放线架体10且感应端能够位于于通孔的延伸方向。当放线轮11转动时,第一红外传感器13能够获取放线轮11的转动角度信息。第一红外传感器13的输出端能够输出放线端转角信息。
[0073]
收线架包括:
[0074]
一个收线架体20,其能够设置于支撑面。
[0075]
一个收线轮21,其能够沿一个第二回转轴线顺时针转动的设置于收线架体20。第二回转轴线平行于第一回转轴线。收线轮21的外周向能够缠绕从放线轮11沿放线方向脱离的电线30。当收线轮21转动时,电线30能够沿一个收线方向缠绕于收线轮21的外周向。
[0076]
一个第二计数盘22,其于收线轮21同轴且固定设置。第二计数盘22的外周向从收线轮21的径向延出。在第二计数盘22的延出部分绕第二回转轴线均匀开设多个通孔。
[0077]
一个第二伺服电机201,其输出轴能够驱动收线轮21绕第二回转轴线转动。
[0078]
一个第二红外传感器23,其设置于收线架体20且感应端能够位于于通孔的延伸方向。当收线轮21转动时,第二红外传感器23能够获取收线轮21的转动角度信息。第二红外传感器23的输出端能够输出收线端转角信息。
[0079]
主处理器301配置为,获取放线端转角信息及收线端转角信息的当前转角差值。若当前转角差值大于设定转角差值,则根据当前转角差值校正作为第二伺服电机201的伺服校正量驱动第二伺服电机201。
[0080]
在本发明的另一种实施方式中,放线端转角信息中包括放线轮11标识信息。收线端转角信息中包括收线轮21标识信息。
[0081]
在本发明的另一种实施方式中,包括:多个输入接口及多个输出接口。多个输入接口及多个输出接口分别与主处理器301的数据端口连接。
[0082]
在本发明的另一种实施方式中,还包括:一个输入装置401,其与输入接口连接获取设定转角差值。
[0083]
在本发明的另一种实施方式中,还包括:一个显示装置501,其与输出接口连接且能够输出当前转角差值、放线轮11标识信息及收线轮21标识信息。
[0084]
应当理解,虽然本说明书是按照各个实施方式中描述的,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
[0085]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1