翻转设备及仓储系统的制作方法
1.本技术涉及一种翻转设备及仓储系统,特别是一种用来翻转承载多个电路板的箱体的翻转设备,及具有该翻转设备的仓储系统。
背景技术:
2.现有常见的电路板生产厂商,储存电路板的方式,大多是利用具有多个插槽的箱体,来承装多个电路板,亦即,单一个箱体中承装有多个电路板。部分厂商为了降低各个电路板与箱体的接触面积,会将箱体倾斜地存放;此种厂商一般来说,都是利用人工的方式,将箱体搬到特殊设计的台车的支架上;箱体设置于台车的支架上后,相对于地平线将会是呈现为倾斜状。利用人工的方式翻转箱体,不但效率低,还很容易发生电路板掉落的问题。
技术实现要素:
3.本技术公开一种翻转设备及仓储系统,主要用以改善习知利用人工的方式翻转箱体,所带来的各种不便。
4.本技术的其中一个实施例公开一种翻转设备,其用以翻转一箱体,箱体具有多个插槽及一开口,开口与多个插槽相互连通,各个插槽用以容置一个电路板,翻转设备包含:一处理装置:一支架;两个夹持架,其彼此相面对地设置;两个横向移动机构,其设置于支架,各个横向移动机构与各个夹持架相连接,各个横向移动机构与处理装置电性连接,处理装置能控制两个横向移动机构作动,而使两个夹持架向彼此相互靠近或彼此相互远离的方向移动,据以夹持箱体的彼此相反的两侧或不再夹持箱体;两个旋转机构,其与两个横向移动机构相连接,且各个旋转机构与各个夹持架相连接,各个旋转机构与处理装置电性连接,处理装置能控制两个旋转机构作动,以使两个夹持架同时相对于支架顺时针旋转或逆时针旋转一预定角度。
5.优选地,翻转设备还包含两个升降机构,其设置于支架,各个横向移动机构与各个升降机构相连接,各个升降机构与处理装置电性连接,处理装置能控制两个升降机构作动,而使两个升降机构带动两个夹持架同时相对于支架向上移动或向下移动。
6.优选地,翻转设备还包含一输送机构,其包含一轨道、一滑动件及一台车,滑动件可滑动地设置于轨道,台车与滑动件相连接,处理装置电性连接滑动件,处理装置能控制滑动件于轨道上移动,而使台车移动至两个夹持架之间;台车用以承载箱体。
7.优选地,各个夹持架包含一侧板、至少一第一限位结构及至少一第二限位结构,侧板彼此相邻的两个侧边分别设置有第一限位结构及第二限位结构;两个夹持架夹持箱体时,两个侧板抵靠于箱体彼此相反的两侧壁,第一限位结构及第二限位结构则分别抵靠箱体的不同侧壁。
8.优选地,各个夹持架还包含至少一第一卡合结构及至少一第二卡合结构,第一卡合结构及第二卡合结构用以与设置于支架的箱体相互卡合,以限制箱体相对于支架的活动范围。
9.本技术的其中一个实施例公开一种仓储系统,其用以储存多个箱体,各个箱体具有多个插槽及一开口,开口与多个插槽相互连通,各个插槽用以容置一个电路板,仓储系统包含:一翻转设备,其用以翻转各个箱体,翻转设备包含:一处理装置:一支架;两个夹持架,其彼此相面对地设置;两个横向移动机构,其设置于处理装置,各个横向移动机构与各个夹持架相连接,各个横向移动机构与处理装置电性连接,处理装置能控制两个横向移动机构作动,而使两个夹持架向彼此相互靠近或彼此相互远离的方向移动,据以夹持箱体的彼此相反的两侧或不再夹持箱体;两个旋转机构,其与两个横向移动机构相连接,且各个旋转机构与各个夹持架相连接,各个旋转机构与处理装置电性连接,处理装置能控制两个旋转机构作动,以使两个夹持架同时相对于支架顺时针旋转或逆时针旋转一预定角度;一仓储设备,其用以储存多个箱体;一移载设备,其用以将被翻转设备旋转预定角度的箱体,以相同姿态移入仓储设备中存放。
10.优选地,翻转设备还包含两个升降机构,其设置于支架,各个横向移动机构与各个升降机构相连接,各个升降机构与处理装置电性连接,处理装置能控制两个升降机构作动,而使两个升降机构带动两个夹持架同时相对于支架向上移动或向下移动。
11.优选地,翻转设备还包含一输送机构,其包含一轨道、一滑动件及一台车,滑动件可滑动地设置于轨道,台车与滑动件相连接,处理装置电性连接滑动件,处理装置能控制滑动件于轨道上移动,而使台车移动至两个夹持架之间;台车用以承载箱体。
12.优选地,各个夹持架包含一侧板、至少一第一限位结构及至少一第二限位结构,侧板彼此相邻的两个侧边分别设置有第一限位结构及第二限位结构;两个夹持架夹持箱体时,两个侧板抵靠于箱体彼此相反的两侧壁,第一限位结构及第二限位结构则分别抵靠与箱体的各个侧壁相邻的两个侧面。
13.优选地,各个夹持架还包含至少一第一卡合结构及至少一第二卡合结构,第一卡合结构及第二卡合结构用以与设置于支架的箱体相互卡合,以限制箱体相对于支架的活动范围。
14.综上所述,本技术的翻转设备及仓储系统能固持承载有多个电路板的箱体,并使箱体旋转一预定角度,而相关的移载设备则能将被翻转设备旋转预定角度的箱体,以相同姿态移入仓储设备中存放。
15.为能更进一步了解本技术的特征及技术内容,请参阅以下有关本技术的详细说明与附图,但是此等说明与附图仅用来说明本技术,而非对本技术的保护范围作任何的限制。
附图说明
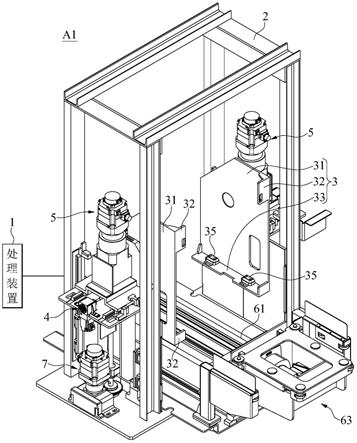
16.图1为本技术的翻转设备的示意图。
17.图2为箱体的示意图。
18.图3为本技术的翻转设备的另一视角的示意图。
19.图4为本技术的翻转设备的前视图。
20.图5及图6为本技术的翻转设备设置有箱体的不同视角的另一示意图。
21.图7为本技术的翻转设备的夹持架固持箱体的示意图。
22.图8为本技术的翻转设备翻转箱体的示意图。
23.图9为本技术的仓储系统的俯视示意图。
具体实施方式
24.于以下说明中,如有指出请参阅特定图式或是如特定图式所示,其仅是用以强调于后续说明中,所述及的相关内容大部份出现于该特定图式中,但不限制该后续说明中仅可参考所述特定图式。
25.请参阅图1至图4,本技术的翻转设备a1用以翻转一箱体b。如图2所示,所述箱体b具有多个插槽b1及一开口b2,开口b2与多个插槽b1相互连通,各个插槽b1用以容置一个电路板c。如图1、图3及图4所示,翻转设备a1包含:一处理装置1、一支架2、两个夹持架3、两个横向移动机构4及两个旋转机构5。处理装置1例如可以是各式计算机、微处理器、服务器等,于此不加以限制。支架2主要是用来支撑两个夹持架3、两个横向移动机构4及两个旋转机构5,支架2也可以是用来支撑处理装置1,支架2的外型可以是依据需求变化,图中所示仅为其中一示范态样。
26.两个夹持架3彼此相面对地设置。各个夹持架3可以是包含一侧板31及、一第一限位结构32及一第二限位结构33,侧板31彼此相邻的两个侧边分别设置有第一限位结构32及第二限位结构33。第一限位结构32及第二限位结构33可以是片状结构,且第一限位结构32及第二限位结构33可以是由侧板31的两相邻侧边向外延伸形成。
27.两个夹持架3主要是用来共同夹持箱体b的两侧,各个夹持架3的外型可以是依据箱体b的外型而变化,图中所示为仅为其中一示范态样。两个夹持架3夹持箱体b时,两个侧板31抵靠于箱体b彼此相反的两侧壁,第一限位结构32及第二限位结构33则分别抵靠与箱体b的各个侧壁相邻的两个侧壁,也就是说,两个夹持架3夹持箱体b时,各个侧板31、第一限位结构32及第二限位结构33是分别抵靠于箱体b的不同侧壁。当两个夹持架3被两个旋转机构5带动而旋转时,箱体b将会抵靠于两个夹持架3的第一限位结构32及第二限位结构33,而各第一限位结构32及各第二限位结构33将共同限制箱体b相对于侧板31的活动范围。
28.在较佳的实施例中,各个夹持架3还可以包含一第一卡合结构34及一第二卡合结构35,第一卡合结构34可以是设置于第一限位结构32,第二卡合结构35可以是设置于第二限位结构33。第一卡合结构34及第二卡合结构35用以与箱体b相互卡合,据以限制箱体b相对于夹持架3的活动范围。
29.两个横向移动机构4设置于支架2,各个横向移动机构4与各个夹持架3相连接,各个横向移动机构4与处理装置1电性连接。处理装置1能控制两个横向移动机构4作动,而使两个夹持架3向彼此相互靠近或彼此相互远离的方向移动,据以夹持箱体b的两侧或不再夹持箱体b。
30.在实际应用中,横向移动机构4例如可以是包含滑轨及滑块,滑块与夹持架3相连接,处理装置1则能控制滑块于滑轨上移动,据以使夹持架3向靠近或远离箱体b的方向移动;或者,横向移动机构4也可以是包含一气压缸(或油压缸)及一推杆,推杆与夹持架3相连接,而处理装置1能控制气压缸作动,以使推杆伸缩移动,据以使夹持架3移动。当然,只要能受处理装置1控制,且能带动两个夹持架3夹持箱体b或不再夹持箱体b,横向移动机构4可以是包含任何构件。
31.两个旋转机构5与两个横向移动机构4相连接,且各个旋转机构5与各个夹持架3相连接,各个旋转机构5与处理装置1电性连接,处理装置1能控制两个旋转机构5作动,以使两个夹持架3同时相对于支架2顺时针旋转或逆时针旋转一预定角度。各个旋转机构5例如可
以包含一数控马达,数控马达的转轴与夹持架3相连接,处理装置1能控制数控马达,而使数控马达的转轴正转或反转。在较佳的应用中,处理装置1可以是能连接一输入设备(例如是触控屏幕、键盘、鼠标等),而用户可以是通过操作输入设备,以改变所述预定角度。在实际应用中,翻转设备a1还可以是包含有两个侦测器,两个侦测器分别用来侦测夹持架3实际旋转的角度,而处理装置1能依据两个侦测器的侦测结果,判断两个夹持架3实际上是否旋转相同角度,若两个夹持架3实际上的旋转角度不相同,则处理装置1可以是控制其中一个数控马达,据以使两个数控马达能使两个夹持架3旋转向同一方向旋转同一预定角。
32.翻转设备a1的两个夹持架3夹持箱体b的流程例如可以是:处理装置1先控制两个横向移动机构4作动,而使两个夹持架3向箱体b的方向靠近,以夹持位于两个夹持架3之间的箱体b;当两个夹持架3夹持箱体b时,处理装置1将控制两个旋转机构5作动,以使两个夹持架3向同一方向旋转所述预定角度。特别说明的是,各个夹持架3相反地面的一侧可以是不具有任何延伸结构且未设有任何构件,如此,将可避免夹持架3堆积落尘。
33.在较佳的实施例中,翻转设备a1还可以是包含一侦测器(图未示),侦测器用以侦测两个夹持架3之间是否设置有箱体b,处理装置1电性连接侦测器。处理装置1可以是先依据侦测器所传递的信号,判断两个夹持架3之间设置有箱体b后,才控制两个横向移动机构4作动,而使两个夹持架3夹持箱体b。
34.当两个夹持架3共同夹持箱体b,且处理装置1控制两个旋转机构5作动,而使箱体b呈现为倾斜状态时,处理装置1可以是发出特定的信号至一移载设备(例如是各式机械手臂),以使所述移载设备夹持呈现为倾斜状态的箱体b。当移载设备夹持被两个夹持架3所夹持的箱体b时,移载设备a3可以是发送特定的信号至处理装置1,处理装置1接收移载设备传递的信号后,将控制两个横向移动机构4作动,以使两个夹持架3不再夹持箱体b;当移载设备将箱体b夹离时,处理装置1将控制两个旋转机构5作动,而使两个夹持架3移动至旋转前的位置。在不同的实施例中,翻转设备a1还可以是包含另一侦测器(图未示),其用以侦测两个夹持架3之间是否设置有移载设备,处理装置1则能在侦测器侦测两个夹持架3设置有移载设备时,控制两个横向移动机构4作动,而使两个夹持架3不再夹持箱体b。
35.如图1、图3及图4所示,在较佳的实施例中,翻转设备a1还可以包含一输送机构6及两个升降机构7。输送机构6可以包含一轨道61、一滑动件62及一台车63。滑动件62可滑动地设置于轨道61,台车63与滑动件62相连接。处理装置1电性连接滑动件62,处理装置1能控制滑动件62于轨道61上移动,而使台车63移动至两个夹持架3之间。台车63用以承载箱体b。当相关人员或是设备将箱体b设置于台车63后,处理装置1可以控制滑动件62于轨道61移动,而使台车63移动至两个夹持架3之间。
36.如图5所示,在较佳的实施例中,台车63上可以是设置有一侦测器(图未示)及一定位机构(图未示),处理装置1能通过该侦测器的侦测结果,判断台车63上是否设置有箱体b。当处理装置1通过设置于台车63上的侦测器,判断台车63上设置有箱体b时,处理装置1可以控制定位机构作动,以使定位机构限制设置于台车63上的箱体b相对于台车63的活动范围。如图6所示,当处理装置1控制面板车63移动至两个夹持架3之间后,处理装置1将会先控制定位机构作动,以使定位机构不再限制箱体b,接着,处理装置1才会控制两个横向移动机构4作动,而使两个夹持架3夹持设置于台车63上的箱体b。
37.两个升降机构7设置于支架2,且各个横向移动机构4与各个升降机构7相连接。各
个升降机构7与处理装置1电性连接,处理装置1能控制两个升降机构7作动,而使两个升降机构7带动两个夹持架3同时相对于支架2向上移动或向下移动。各个升降机构7例如可以是包含一滑轨及一滑块,滑块可滑动地设置于滑轨上,且横向移动机构4、旋转机构5及夹持架3则是与滑块相连接,而滑块于滑轨上移动时,则能同时带动横向移动机构4、旋转机构5及夹持架3移动。
38.如图6及图7所示,当处理装置1控制两个横向移动机构4,而使两个夹持架3夹持设置于台车63上的箱体b后,处理装置1将控制两个升降机构7一同作动,以使两个夹持架3及其固持的箱体b向远离台车63的方向移动,直到箱体b不再与台车63相接触。
39.如图7及图8所示,当箱体b不再与台车63相接触时,处理装置1可以是先控制面板车63离开两个夹持架3并移动回原位,接着,处理装置1将控制两个旋转机构5作动,以使两个夹持架3带动箱体b旋转预定角度。
40.请参阅图9,本技术的仓储系统a用以储存多个箱体b。仓储系统包含:一翻转设备a1、一中央控制设备a2、一移载设备a3及一仓储设备a4。所述翻转设备a1的详细说明,请参阅前述实施例的说明,于此不再赘述。移载设备a3用以将被翻转设备a1旋转预定角度的箱体b,以相同姿态移入仓储设备a4中存放。
41.中央控制设备a2通讯连接翻转设备a1的处理装置1、移载设备a3及仓储设备a4。中央控制设备a2例如可以是各式计算机、服务器等。当翻转设备a1将箱体b翻转至预定角度后,处理装置1可以是传递特定的信号至中央控制设备a2,而中央控制设备a2则可以是控制移载设备a3,以使移载设备a3移动至翻转设备a1,并取下被翻转设备a1夹持的箱体b。
42.当移载设备a3由翻转设备a1取下箱体b后,移载设备a3将会将箱体b移载至仓储设备a4,以使箱体b以相同的倾斜状态,设置于仓储设备a4中。在实际应用中,移载设备a3例如可以是包含一活动车(例如是各式agv)、一机械手臂及一处理器,处理器能控制活动车及机械手臂作动。
43.仓储设备a4例如可以是包含多个储存架a41及一辅助移载装置a42。多个储存架a41及辅助移载装置a42可以是设置于一仓储空间sp中,所述仓储空间sp可以是设置有一活动门d。辅助移载装置a42通讯连接中央控制设备a2。移载设备a3由翻转设备a1取下箱体b后,移载设备a3将会移动至仓储设备a4。当固持有箱体b的移载设备a3移动至仓储空间sp时,移载设备a3可以发送特定信号至中央控制设备a2,而中央控制设备a2将会控制辅助移载装置a42,以使辅助移载装置a42将移载设备a3所固持的箱体b,以相同的姿态移载至储存架a41存放。相对地,当相关人员欲取出特定箱体b时,相关人员可以是通过中央控制设备a2控制辅助移载装置a42,以使其将存放于储存架a41的特定箱体b取出。
44.在不同的实施例中,辅助移载装置a42也可以是通讯连接移载设备a3,而移载设备a3将箱体b移载至仓储设备a4时,移载设备a3可以是直接发送信号至辅助移载装置a42,接收到来自移载设备a3所传递的信号的辅助移载装置a42,则会取下移载设备a3所固持的箱体b,并将其设置于储存架a41。在另一实施例中,仓储设备a4也可以是仅包含多个储存架a41,而移载设备a3可以是直接将其所固持的箱体b存放至储存架a41上。
45.综上所述,本技术的翻转设备及具有该翻转设备的仓储系统可以固持承载有多个电路板的箱体,并使箱体旋转一预定角度,而本技术的翻转设备可以解决习知利用人工的方式翻转箱体所带来的诸多不便。
46.以上所述仅为本技术的较佳可行实施例,非因此局限本技术的专利范围,故举凡运用本技术说明书及图式内容所做的等效技术变化,均包含于本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1