采集针转接机械手的制作方法
[0001]
本实用新型涉及一种用于一次性采集针自动缠绕包装的包装设备,具体涉及采集针包装设备的采集针转接机械手。
背景技术:
[0002]
一次性采集针由中间软管和连接于中间软管两端的针头、尾管组成,一次性采集针在进行包装工作时,首先在理针送针平台上进行输送,使各采集针之间被前后整齐,然后再送到缠绕包装机构,由于理针送针平台上输送的采集针的间距很小,而缠绕包装机构在对采集针进行缠绕时需要各采集针之间有较大的间距,这样就需要设计合理的转接机械手结构来完成上述动作,现有技术没有合适的结构来适应。
技术实现要素:
[0003]
针对背景技术存在的不足,本实用新型的目的旨在提供一种用于采集针从理针送针平台到缠绕包装机构的转接输送,转接过程中实现采集针相互间距离的同步增大,以适应缠绕包装机构对多条采集针的同时缠绕包装需要的采集针转接机械手。
[0004]
本实用新型是采取如下技术方案来完成的:
[0005]
采集针转接机械手,其特征在于:包括连接于移动支架上的机械手架,机械手架内安装左右并排设置的多组夹爪单元,每组夹爪单元由左夹爪和右夹爪构成,左夹爪和右夹爪作相对的夹紧和松开动作,左右夹爪分别连接于夹爪气缸的左右夹臂上,夹爪气缸在下滑座上安装,多组夹爪单元对应多只下滑座,多只下滑座之间作横向方向的同步靠近或远离动作由滑座气缸进行推动,多只下滑座对应多只上滑座,上下滑座之间通过x型铰接臂连接.
[0006]
所述下滑座横向滑动设于下导柱上,左边的一只下滑座和下导柱在机械手架内固定安装,所述上滑座横向滑动设于上导柱上,上滑座、上导柱可上下活动设于机械手架内,上导柱设有前后两条,两条上导柱之间设有导向板对上导柱的上下动作进行导向,导向板在机械手架内固定安装。
[0007]
上述技术方案的采集针转接机械手,用于采集针从理针送针平台到缠绕包装机构的转接输送,转接过程中实现采集针相互间距离的同步增大,以适应缠绕包装机构对多条采集针的同时缠绕包装需要。
附图说明
[0008]
本实用新型有如下附图:
[0009]
图1为本实用新型的结构示意图,
[0010]
图2为图1的正面方向视图。
具体实施方式
[0011]
下面通过具体实施例来对本实用新型作出详细的说明:
[0012]
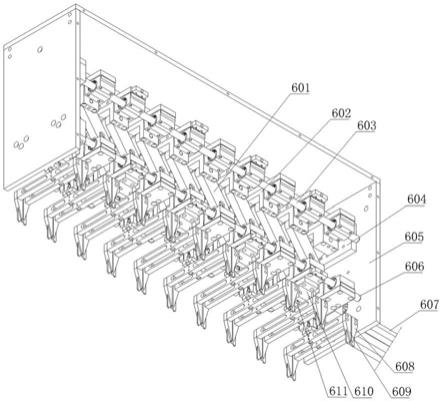
如图所示,本实用新型的采集针转接机械手,包括连接于移动支架上的机械手架605,机械手架605内安装左右并排设置的十组夹爪单元,每组夹爪单元由左夹爪609和右夹爪608构成,左夹爪609和右夹爪608作相对的夹紧和松开动作,左右夹爪分别连接于夹爪气缸611的左右夹臂上,夹爪气缸611在下滑座610上安装,十组夹爪单元对应十只下滑座610,十只下滑座610之间作横向方向的同步靠近或远离动作由滑座气缸607进行推动,十只下滑座610对应十只上滑座602,上下滑座之间通过x型铰接臂601连接;所述下滑座610横向滑动设于下导柱606上,左边的一只下滑座和下导柱606在机械手架605内固定安装,所述上滑座602横向滑动设于上导柱603上,上滑座602、上导柱603可上下活动设于机械手架605内,上导柱603设有前后两条,两条上导柱603之间设有导向板604对上导柱603的上下动作进行导向,导向板604在机械手架605的右侧板内壁固定安装。
[0013]
本实用新型是这样工作的:机械手架605首先移动到理针送针平台的输出端上方,然后机械手架605下移,下移到位后,夹爪气缸611动作,一组夹爪单元夹取一条采集针,十组夹爪单元夹取十条采集针,此时十组夹爪单元之间很靠近,靠近距离正好等于理针送针平台上采集针的间距,等夹取动作完成后,机械手架605上移并随移动支架向缠绕包装机构方向进行移动,同时滑座气缸607动作,推动x型铰接臂601打开,于是十只下滑座610之间作同步远离动作,使十条采集针之间的间距变大,以适应缠绕包装机构对采集针的缠绕包装需要。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1