一种自动搬运料盘装置的制作方法
1.本实用新型涉及自动化搬运加工技术领域。
背景技术:
2.现有技术中,生产成型设备是依靠人工手工将零件码放到托盘上,再由人工从托盘上将零件一个一个放置到生产成型设备上进行加工。
3.现有技术中,生产成型设备没有配置自动上料机构,由人工等候在未配置自动上料机构的成型设备单机旁,依照成型设备的动作次序,逐个放置零件,成型设备旁边不能离开操作工,既耗时又耗人工。
技术实现要素:
4.本实用新型的目的在于提供一种自动搬运料盘的装置,其具有能够将多层码放好零件的托盘组整体通过升降机构将托盘一层一层上升至抓取产品的工作位,等到该托盘上的产品抓取完后,机械抓手将空托盘抓到空托盘放置区域,即可通过转运小车把空托盘组集体从本装置中拖走。本装置能够与负责抓取产品的机器人配合进行上料,从而降低操作人员劳动强度,解决现有技术中存在的成型设备旁边不能离开操作工,既耗时又耗人工的技术问题。
5.为解决上述技术问题,本实用新型提供了一种自动搬运料盘装置,包括:工作台、第一托盘支架、第二托盘支架、升降机构、取托盘机械手、检测机构;
6.所述工作台包括:收料上料区域、空托盘放置区域;
7.所述升降机构包括:第一升降机构、第二升降机构;
8.所述第一托盘支架通过所述第一升降机构设置于所述收料上料区域中,所述第二托盘支架通过所述第二升降机构设置于所述空托盘放置区域中;
9.第一托盘支架在第一升降机构作用下降至最低水平位置处为承接托盘组工作位,第一托盘支架在第一升降机构作用下上升至最高水平位置处为取产品工作位;
10.第二托盘支架在第二升降机构作用下降至最低水平位置处为待取空托盘组工作位,第二托盘支架在第二升降机构作用下上升至最高水平位置处为承接空托盘工作位;
11.所述检测机构包括:第一检测元件、第二检测元件、第三检测元件、第四检测元件;
12.所述第一检测元件设置于收料上料区域的来料方向;
13.所述第二检测元件设置于收料上料区域的所述取产品工作位;
14.所述第三检测元件设置于空托盘放置区域的所述承接空托盘工作位;
15.所述第四检测元件设置于空托盘放置区域的所述待取空托盘组工作位;
16.所述取托盘机械手设置于工作台上,取托盘机械手的执行范围包括取产品工作位与承接空托盘工作位之间往复;
17.第一升降机构、第二升降机构、检测机构、取托盘机械手,均与现场控制系统连接。
18.对上述基础结构进行改机的技术方案为,还包括:锁紧机构;所述锁紧机构设置于
工作台收料上料区域上,锁紧机构的执行端朝向位于所述取产品工作位上的托盘,锁紧机构与所述现场控制系统连接。
19.对上述结构进行优选的技术方案为,所述工作台包括:底座、左支撑板、右支撑板、背部支架、前部连接架;
20.所述底座的俯视结构呈e型结构,所述e型结构的两处开口分别处于工作台的所述收料上料区域、所述空托盘放置区域,e型结构的两个短边分别与所述左支撑板、所述右支撑板连接,e型结构的长边与所述背部支架连接,所述前部连接架设置于e型结构的所述两处开口侧方向,前部连接架的两端分别与左支撑板、右支撑板上部连接,以底座上位于e型结构两处开口衔接处的结构为分界将工作台划分为所述收料上料区域与所述空托盘放置区域;
21.所述第一升降机构设置于位于收料上料区域的工作台背部支架上,所述第二升降机构设置于位于第二区域的工作台背部支架上。
22.进一步优选的技术方案为,所述锁紧机构设置于所述工作台收料上料区域的背部支架上部或所述工作台收料上料区域的所述连接架上;或,
23.所述锁紧机构包括:第一锁紧机构、第二锁紧机构;所述第一锁紧机构设置于所述工作台收料上料区域的背部支架上部;所述第二锁紧机构设置于工作台收料上料区域的所述连接架上。
24.再进一步优选的技术方案为,所述第一锁紧机构包括:第一锁定气缸、第二锁定气缸;第二锁紧机构包括:第三锁紧气缸、第四锁紧气缸;所述第一锁紧气缸与所述第二锁紧气缸以所述工作台收料上料区域中心线对称布置,所述第三锁紧气缸、第四锁紧气缸与第一锁定气缸、第二锁定气缸对称布置于前部连接架上。
25.再进一步改进的技术方案为,还包括:滑道、滑道安装架、第一滑块;
26.所述取托盘机械手包括:x方向驱动机构、y方向驱动机构、机械抓手;
27.所述滑道安装架沿所述工作台顶部边沿架设在所述工作台收料上料区域与空托盘放置区域上方,所述滑道设置于滑道安装架上,滑道上设置有所述第一滑块,第一滑块上连接有驱动机械抓手沿滑道方向移动的所述x方向驱动机构,第一滑块上还连接有连接板,所述连接板上开设有与滑道垂直的水平方向设置的滑槽,所述机械抓手设置于所述滑槽中,连接板上还设置有驱动机械抓手沿滑槽往复运动的所述y方向驱动机构,y方向驱动机构的执行端与机械抓手连接,x方向驱动机构、y方向驱动机构、机械抓手均与所述现场控制系统连接。
28.又进一步改进的技术方案为,还包括:缓冲结构;所述缓冲结构与所述机械抓手连接。
29.又进一步优选的技术方案为,所述第一升降机构、所述第二升降机构,至少其中之一包括:丝杆、滑轨、第二滑块、驱动机构;
30.所述驱动机构设置于工作台收料上料区域的背部支架上,驱动机构的动力输出端与所述丝杆下端连接;
31.丝杆沿垂直方向设置,丝杆上端与背部支架固定连接;
32.所述滑轨与丝杆平行设置,滑轨上端与背部支架固定连接;
33.所述滑块上开设有与丝杆螺纹配合的螺纹孔,滑块上还开设有与滑轨滑配的通
孔,滑块通过所述螺纹孔设置于丝杆上,通过所述通孔设置于滑轨上,滑块与所述第一托盘支架连接。
34.更加优选的技术方案为,还包括:行程开关;所述行程开关设置于所述升降机构上升路径上的极限位置处。
35.本实用新型的有益效果在于:
36.本实用新型所提供的自动搬运料盘装置能够将码放好零件的托盘置于抓取产品的工作位,再将取完料的空托盘转移至空托盘放置区域集中整齐摆放,从而使转运小车可以一次性将本装置中的空托盘拖走,搬运过程稳定可靠,并从而保证生产效率,减小事故的发生,提升设备寿命,增加产能,节约时间损害。并且,本实用新型可以与负责抓取产品的机器人配合实现自动化上料。
附图说明
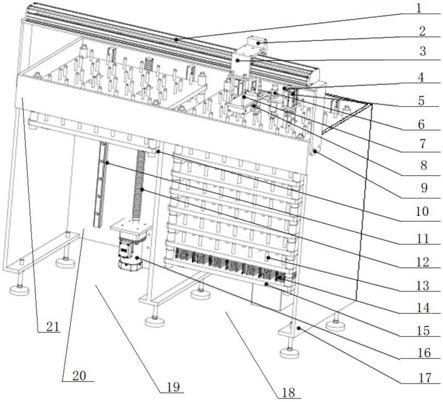
37.图1为本实用新型实施例的结构示意图。
38.其中,1
‑
滑道,2
‑
x方向驱动机构,3
‑
第一滑块,4
‑
机械手安装架,5
‑
机械抓手,6
‑
缓冲器,7
‑
连接杆,8
‑
y方向驱动机构,9
‑
滑道安装架,10
‑
第二托盘支架,11
‑
滑轨,12
‑
丝杆,13
‑
定位销,14
‑
产品,15
‑
托盘,16
‑
伺服电机,17
‑
右支撑板,18
‑
收料上料区域,19
‑
空托盘放置区域,20
‑
背部支架,21
‑
前部连接架。
具体实施方式
39.为进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型提出的一种自动搬运料盘装置的具体实施方式及工作原理进行详细说明。
40.如图1所示,本实用新型实施例所介绍的自动搬运料盘装置的基础结构包括:工作台、第一托盘支架、第二托盘支架10、升降机构、取托盘机械手、检测机构。
41.其中,工作台包括:收料上料区域、空托盘放置区域。升降机构包括:第一升降机构、第二升降机构。第一托盘支架通过第一升降机构设置于收料上料区域中,第二托盘支架10通过第二升降机构设置于空托盘放置区域中;第一托盘支架在第一升降机构作用下降至最低水平位置处为承接托盘组工作位,第一托盘支架在第一升降机构作用下上升至最高水平位置处为取产品工作位;第二托盘支架10在第二升降机构作用下降至最低水平位置处为待取空托盘组工作位,第二托盘支架在第二升降机构作用下上升至最高水平位置处为承接空托盘工作位。检测机构包括:第一检测元件、第二检测元件、第三检测元件、第四检测元件;第一检测元件设置于收料上料区域的来料方向;第二检测元件设置于收料上料区域的取产品工作位;第三检测元件设置于空托盘放置区域的承接空托盘工作位;第四检测元件设置于空托盘放置区域的待取空托盘组工作位。取托盘机械手设置于工作台上,取托盘机械手的执行范围包括取产品工作位与承接空托盘工作位之间往复;第一升降机构、第二升降机构、检测机构、取托盘机械手,均与现场控制系统连接。
42.通过上述连接方式,使得第一托盘支架在第一升降机构作用下往返于承接托盘组工作位与取产品工作位之间;第二托盘支架10在第二升降机构作用下往返于待取空托盘组工作位与承接空托盘工作位之间;收料上料区域的来料方向、取产品工作位、承接空托盘工
作位、待取空托盘组工作位均设置有检测机构;取托盘机械手于取产品工作位与承接空托盘工作位之间往复。
43.对于工作台,本实施例中所采用的工作台包括:底座、左支撑板、右支撑板17、背部支架20、前部连接架21。如图1所示,底座的俯视结构呈e型结构,e型结构的两处开口分别处于工作台的收料上料区域18、空托盘放置区域19。e型结构的两个短边分别与左支撑板、所支撑板17连接,e型结构的长边与背部支架20连接,前部连接架21设置于e型结构的所述两处开口侧方向,前部连接架的两端分别与左支撑板、右支撑板17上部连接,以底座上位于e型结构两处开口衔接处的结构为分界将工作台划分为收料上料区域与空托盘放置区域。e型结构两处开口衔接处还设置有平行于左支撑板、右支撑板17的加强板,该加强板同时起到分隔收料上料区域18、空托盘放置区域19的作用。
44.为保证码处于取产品工作位上的托盘15在被取走托盘15上码放的产品14的过程中更加稳定,本实施例在工作台收料上料区域设置了锁紧机构,锁紧机构的执行端朝向位于取产品工作位上的托盘15,锁紧机构与现场控制系统连接。本实施例中采用了四个锁定气缸对取产品工作位上的托盘15进行锁定,四个锁定气缸分别设置于工作台收料上料区域的背部支架20上部及前部连接架21上。
45.对于取托盘机械手,本实施例通过滑道1、滑道安装架9、第一滑块3,将取托盘机械手安装于工作台上方。取托盘机械手包括:x方向驱动机构2、y方向驱动机构8、机械抓手5。滑道安装架9沿工作台顶部边沿架设在工作台收料上料区域18与空托盘放置区域19的上方,滑道1设置于滑道安装架9上,滑道1上设置第一滑块3,第一滑块3上连接有驱动机械抓手5沿滑道方向移动的x方向驱动机构2,第一滑块3上还通过连接杆7连接连接板,连接板上开设有与滑道1垂直的水平方向设置的滑槽,机械抓手5通过机械手安装架4设置在滑槽中,连接板上还设置有驱动机械抓手5沿滑槽往复运动的y方向驱动机构8,y方向驱动机构8的执行端与机械抓手5连接,x方向驱动机构2、y方向驱动机构8、机械抓手5均与现场控制系统连接。
46.为使得机械抓手5抓取托盘时不晃动,更稳定,本实施例在机械抓手5上还设置了缓冲器6。
47.对于升降机构,本实施例中第一升降机构、第二升降机构均包括:丝杆12、滑轨11、第二滑块、伺服电机16、减速机。
48.伺服电机16、减速机设置于工作台收料上料区域的背部支架20上,伺服电机16的输出端经减速机与丝杆12下端连接,丝杆12沿垂直方向设置,丝杆12上端与背部支架20固定连接,滑轨11与丝杆12平行设置,滑轨11上端与背部支架20固定连接,第二滑块上开设有与丝杆12螺纹配合的螺纹孔,滑块上还开设有与滑轨11滑配的通孔,滑块通过螺纹孔设置于丝杆11上,通过通孔设置于滑轨12上,滑块与托盘支架连接。
49.为控制升降机构的行程及限位保护,本实施例中,在升降机构上升路径上的极限位置处设置有行程开关。
50.本实施例能够将码放好零件的托盘置于抓取产品的工作位,再将取完料的空托盘转移至空托盘放置区域集中整齐摆放,从而使转运小车可以一次性将本装置中的空托盘拖走。在搬运托盘时,通过机械抓手抓取托盘,能够防止托盘晃动,从而保证生产效率,减小事故的发生,提升设备寿命,增加产能,节约时间损害。
51.本方案所介绍的装置能够与“负责抓取产品的机器人”协同工作。
52.工作流程为:
53.初始状态时,收料上料区域18中的第一升降机构将第一托盘支架降至承接托盘组工作位,空托盘放置区域19中的第二升降机构将第二托盘支架10上升至承接空托盘工作位下方。
54.当转运小车将已经码放好产品14的托盘15组整体推到本装置的收料上料区域18时,用于检测来料方向的第一检测元件检测到转运小车送料后将检测信号发送给控制系统,控制系统据此控制收料上料区域18中的第一升降机构顶升第一托盘支架,第一托盘支架托起小车上的托盘组,小车退出。
55.第一升降机构上升,位于第一托盘支架顶部的托盘到达取产品工作位时触发第二检测元件,控制系统根据第二检测元件发来的信号控制第一升降机构停止动作,并控制锁紧机构对取产品工作位上的托盘进行锁定,等待“负责抓取产品的机器人”将托盘15上的产品14取完。
56.然后,控制系统控制取托盘机械手移动至取产品工作位上方抓取空托盘15,本实施例中取托盘机械手通过抓取空托盘15上用于产品定位的定位销13对空托盘15进行抓取。取产品工作位上的空托盘15被抓取走后,第二检测元件将检测信号发送给控制系统,控制系统控制第一升降机构上升。
57.取托盘机械手将空托盘15由取产品工作位搬运至空托盘放置区域19的承接空托盘工作位下方的第二托盘支架10上,此时空托盘15触发位于承接空托盘工作位的第三检测元件,控制系统据此控制第二升降机构下降一个空托盘高度。
58.重复上述操作,直至第二托盘支架10下降至空托盘放置区域的待取空托盘组工作位时,触发第四检测元件,本装置停止动作,待转运小车将空托盘组由待取空托盘组工作位取出后恢复动作。
59.最后所应说明的是,以上具体实施方式仅用以说明本实用新型的技术方案而非限制,尽管参照实例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1