一种用于生产作业区的立体仓库的制作方法
1.本发明涉及的是一种用于生产作业区的立体仓库,属于生产作业区立体仓库的存储技术领域。
背景技术:
2.现有工厂布局设置一般会在生产作业工位周边放置转运物料车或者货架,进行零部件的暂时存放,如采用转运物料车,其物料存放量小;如采用货架结构,需要转运物料车配合进行物料的转存,存储量也有限,物料存储位置、数量调整及托盘上的零部件取放不方便。
技术实现要素:
3.本发明提出的是一种用于生产作业区的立体仓库,其目的旨在克服现有技术存在的缺陷,其主要优点:立体仓库设置在作业工位附近,立体仓库设有托盘移出装置,作业装置可以方便取放已移出货格外托盘上的零部件,在作业工位上完成作业。
4.本发明的技术解决方案:生产作业区包括作业工位、作业装置和立体仓库,生产作业区包括装配作业区和拣选作业区,作业工位包括装配作业的装配作业工位和拣选作业区的拣选作业工位,作业装置包括装配作业装置和拣选作业装置; 立体仓库包括托盘、堆垛机、货架、货格、巷道和托盘移出装置,装配作业工位包括需装配的产品,托盘的上方包括产品上的零部件,零部件包括待装配零部件和待拣选零部件,托盘包括装配托盘和拣选托盘,装配托盘放置的是待装配零部件,拣选托盘放置的是待拣选零部件;货架包括若干个货格,托盘存储在货格内,立体仓库包括存储装配托盘的装配立体仓库,装配作业区包括装配立体仓库;托盘移出装置包括托盘移出导轨和架外移出装置,托盘移出导轨安装在货架上,架外移出装置将货格内的托盘通过托盘移出导轨移出至货格外,或将货格外托盘移出导轨上的托盘移入至货格内;位于装配作业区的装配作业装置将移至装配货格外托盘移出导轨上的装配托盘上方的待装配零部件取出,或将装配托盘从装配货格外的托盘移出导轨上取走,在装配作业工位将待装配零部件装配在产品上;位于拣选作业区的拣选作业装置将移至货格外托盘移出导轨上的拣选托盘上方的待拣选零部件取出,或将拣选托盘从拣选货格外的托盘移出导轨上取走,在拣选作业工位将待拣选零部件放置在货格外的装配托盘上变成待装配零部件,拣选作业装置将装配托盘通过托盘移出装置移至货格内,通过在巷道内运行的堆垛机将货格内的装配托盘运行至装配立体仓库,放置在设定在装配货格内,即通过堆垛机实现托盘在各货格之间的输送。
5.优选地,作业装置包括操作工、机械手臂、小行车和机器人;机器人包括桁架机器人和通用机器人两种结构,桁架机器人包括纵向固定轨道、横向移动轨道、纵向移动机架、横向移动架、升降装置和抓取装置,抓取装置固定在升降装置的底部,升降装置固定在横向移动架上,横向移动架在横向移动轨道上沿方向运行,横向移动轨道固定在纵向移动机架上,纵向移动机架在纵向固定轨道上沿着x方向运行,纵向固定轨道固定在厂房建筑物上;
通用机器人是多轴关节机器人。
6.优选地,拣选作业装置包括转换装置,转换装置位于货格的外侧,包括纵向轨道x、纵向移动架、纵向移动架中的铅直导轨z和铅直移动架,纵向移动架在纵向轨道x上运行,铅直移动架在铅直导轨z上运行,铅直移动架包括装配托盘架、周转托盘架、小托盘推拉装置和拣选作业装置,装配托盘架、周转托盘架和小托盘推拉装置是托盘移出装置的组成部分,通过小托盘推拉装置将货格内的装配托盘拉出至装配托盘架上,将周转托盘拉出至周转托盘架上,拣选作业装置对周转托盘上的待拣选零部件进行拣选后放入装配托盘上,成为待装配零部件,通过小托盘推拉装置将周转托盘架上的周转托盘或装配托盘架上的装配托盘推入货格内。
7.优选地,托盘移出装置包括活动式托盘移出装置和固定式托盘移出装置,活动式托盘移出装置中的托盘移出导轨为伸缩轨道,架外移出装置为导轨推拉装置,当导轨推拉装置将伸缩轨道推回时,伸缩轨道位于货格之内,当导轨推拉装置将伸缩轨道拉出时,伸缩轨道连同其上方的托盘均位于货格之外;通过导轨推拉装置将货格内的伸缩轨道拉出至货格外,伸缩轨道上方的托盘随之移出至货格外,作业装置将移至货格外的托盘上方的零部件取出,或将托盘从伸缩轨道上取走,在拣选作业工位将拣选托盘上的待拣选零部件经拣选后,放置在装配托盘上变成待装配零部件,或在装配作业工位将装配托盘上的待装配零部件装配在产品上;通过导轨推拉装置将位于货格外的伸缩轨道推回至货格内,再通过堆垛机对伸缩轨道上的托盘进行输送;固定式移出装置中的托盘移出导轨为固定轨道,架外移出装置为托盘推拉装置,固定轨道包括位于货格之内的货格内轨道和位于货格之外的货格外轨道,当托盘推拉装置将托盘推回时,托盘位于货格内轨道,当托盘推拉装置将托盘拉出时,托盘位于货格外轨道;通过托盘推拉装置将货格内轨道上的托盘拉出至货格外轨道上;作业装置将移至货格外轨道的托盘上方的零部件取出,或将托盘从货格外轨道上取走,在拣选作业工位将拣选托盘上的待拣选零部件经拣选后,放置在装配托盘上变成待装配零部件,或在装配作业工位将装配托盘上的待装配零部件装配在产品上;通过托盘推拉装置将货格外轨道上的托盘推回至货格内轨道上,再通过堆垛机对货格内轨道上的托盘进行输送。
8.优选地,作业装置也是架外移出装置,通用机器人也是活动式装配移出装置中的导轨推拉装置,即通过通用机器人将装配货格内的伸缩轨道拉出至装配货格外,或将装配货格外的伸缩轨道推回至货格内;桁架机器人也是固定式装配移出装置中的托盘推拉装置,即通过桁架机器人将货格内的托盘拉出至货格外;或将货格外的托盘推回至货格内;操作工既是活动式装配移出装置中的导轨推拉装置,也是固定式装配移出装置中的托盘推拉装置。
9.优选地,转换装置中装配托盘架上的空装配托盘需放置m种零部件,对应的m种零部件的m种待拣选零部件分别位于m个不同位置的拣选货格内的拣选托盘上,通过转换装置将周转托盘架对准设定的拣选货格内的拣选托盘,经小托盘推拉装置将拣选托盘拉至周转托盘架上,用拣选作业装置将拣选托盘上的待拣选零部件放置在装配托盘上,变成待装配零部件,再将周转托盘架上的拣选托盘推至原拣选货格内,转换装置再将周转托盘架对准另一设定的拣选货格内的拣选托盘,装配托盘在装配托盘架上跟随转换装置运行,直至完成m种待装配零部件的放置,再通过小托盘推拉装置推至空货格内,通过堆垛机将载有m种
待装配零部件的装配托盘放置在装配立体仓库中设定的装配货格内。
10.优选地,堆垛机为具有转换装置功能的拣选堆垛机,拣选堆垛机包括双伸缩货叉、小桁架机器人,当位于巷道的双伸缩货叉上分别载有拣选托盘和装配托盘,通过小桁架机器人下方的抓取装置将拣选托盘上的待拣选零部件放置在装配托盘上变成待装配零部件,拣选堆垛机将伸缩货叉上的拣选托盘放置在原货格内,再运行至装配立体仓库将另一伸缩货叉上的装配托盘放置在设定的装配货格内。
11.优选地,生产作业区包括托盘的托盘输送装置,托盘输送装置包括具有顶升和回转功能的托盘rgv输送车或具有顶升和回转功能的托盘agv输送车,通过托盘输送装置实现托盘在装配作业工位、拣选作业工位、立体仓库之间的运行;货格包括与底层地面或楼层板相连的输送车货格,通过托盘rgv输送车或托盘agv输送车,将装配托盘或周转托盘运离输送车货格,或将装配托盘或周转托盘运入并存储在输送车货格内。
12.优选地,生产作业区包括多层厂房,多层厂房包括地下室、一层厂房、二层厂房和三层厂房,一层厂房包括总装作业区,二层厂房包括部件装配作业区,三层厂房包括拣选作业区,多层厂房包括立体仓库,立体仓库包括位于中间的中间立体仓库和位于两侧的两侧立体仓库两种结构,立体仓库包括位于一层厂房的一层固定式托盘移出装置、位于二层厂房的二层固定式托盘移出装置和位于三层厂房的三层活动式托盘移出装置;拣选作业区包括若干托架,通过托盘rgv输送车或托盘agv输送车实现托盘在输送车货格和托架之间的输送,堆垛机将空装配托盘和携带待拣选零件的拣选托盘放置立体仓库在三层厂房内的货格中,三层厂房包括桁架机器人,桁架机器人同时也是导轨推拉装置,在拣选作业区将拣选托盘上的待拣选零件经拣选后,放置在装配托盘上变成待装配零件,再将托盘推回货格内;二层厂房包括通用机器人,堆垛机将携带待拣选零件的拣选托盘放置立体仓库在二层厂房内的货格中,通用机器人同时也是托盘推拉装置,在部件装配作业区将若干待装配零件在装配托盘上装配成待装配部件;一层厂房包括若干柔性并联装配工位,并联装配工位包括产品托盘,地下室包括位于并装配工位下方的底层rgv输送车,通过底层rgv输送车实现产品托盘在各并联装配工位之间的任意输送;堆垛机将携带待装配零件和待装配部件的装配托盘放置立体仓库在一层厂房内的装配货格中,总装作业区包括若干操作工,操作工同时也是托盘推拉装置,在总装作业区将装配托盘上的待装配零件和待装配部件在产品托盘上进行装配,总装成产品。
13.通过上述描述可知,立体仓库设置在作业工位附近,立体仓库设有托盘移出装置,作业装置可以方便取放已移出货格外托盘上的零部件,在作业工位上完成作业。
附图说明
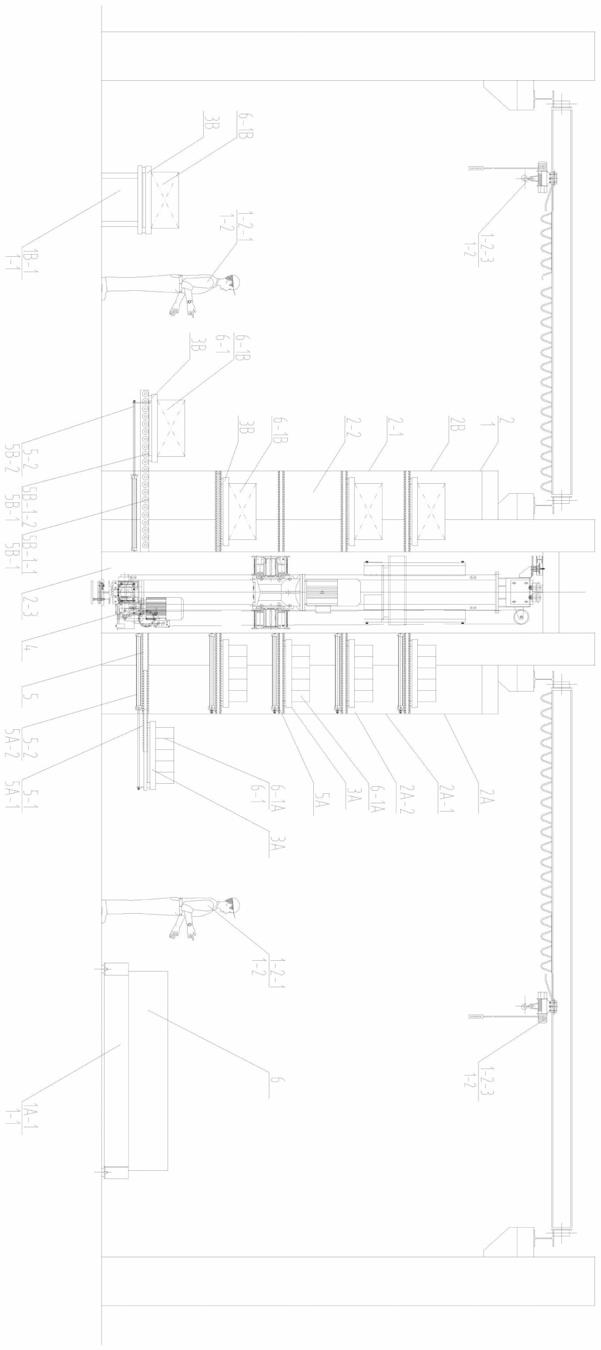
14.图1是由作业工位1
‑
1、作业装置1
‑
2和立体仓库2组成的生产作业区1的结构示意图;
15.图2是图1的俯视图;
16.图3是桁架机器人7a包括纵向固定轨道7ax、横向移动轨道7ay、纵向移动机架7a
‑
1、横向移动架7a
‑
2、升降装置7az和抓取装置7a
‑
3的结构示意图;
17.图4是转换装置8的小托盘推拉装置8
‑
5将周转托盘3b拉出至周转托盘架8
‑
4上的结果示意图;
18.图5是图4的a向视图,也是由纵向轨道8x、纵向移动架8
‑
1、纵向移动架8
‑
1中的铅直导轨8z和铅直移动架8
‑
2组成的转换装置8的结构示意图;
19.图6是通用机器人7b将装配货格2a
‑
2内的通用伸缩轨道5a1
‑
1拉出至装配货格2a
‑
2外,取出待装配零部件6
‑
1a装配至产品6上的结构示意;
20.图7是拣选堆垛机9的双伸缩货叉9
‑
1上分别载有拣选托盘3b和装配托盘3a的结果示意图;
21.图8是图7的俯视图;
22.图9是具有顶升和回转功能的托盘rgv输送车11r输送拣选托盘3b的结构示意图;
23.图10是由地下室10
‑
0、一层厂房10
‑
1、二层厂房10
‑
2和三层厂房10
‑
3组成的多层厂房10的结构示意图;
24.图中的1是生产作业区,包括作业工位1
‑
1、作业装置1
‑
2和立体仓库2;1
‑
1是作业工位;1a
‑
1是装配作业工位;1b
‑
1是拣选作业工位;1
‑
2是 作业装置,包括操作工1
‑2‑
1、机械手臂1
‑2‑
2、小行车1
‑2‑
3和机器人7;1
‑2‑
1是操作工;1
‑2‑
2是机械手臂;1
‑2‑
3是小行车;1a
‑
2是装配作业装置;1b
‑
2是拣选作业装置;1a是装配作业区;1b是拣选作业区;2是立体仓库,包括托盘3、堆垛机4、货架2
‑
1、货格2
‑
2、巷道2
‑
3和托盘移出装置5;2
‑
1是货架;2
‑
2是货格;2
‑
3是巷道;2a是装配立体仓库;2a是装配立体仓库;3是托盘;3a是存储装配托盘;3b是拣选托盘;4是堆垛机;5是托盘移出装置,包括托盘移出导轨5
‑
1和架外移出装置5
‑
2;5
‑
1是托盘移出导轨;5
‑
2是架外移出装置;5是 托盘移出装置,包括活动式托盘移出装置5a和固定式托盘移出装置5b;5a是活动式托盘移出装置;5a
‑
1是伸缩轨道;5a
‑
2是导轨推拉装置;5b是固定式托盘移出装置;5b
‑
1是固定轨道;5b
‑
2是托盘推拉装置;5b
‑1‑
1是货格内轨道;5b
‑1‑
2是货格外轨道;6是产品;6
‑
1是零部件,包括待装配零部件6
‑
1a和待拣选零部件6
‑
1b;6
‑
1a是待装配零部件;6
‑
1b是待拣选零部件;7是机器人,包括桁架机器人7a和通用机器人7b两种结构;7a是桁架机器人; 7a是桁架机器人,包括纵向固定轨道7ax、横向移动轨道7ay、纵向移动机架7a
‑
1、横向移动架7a
‑
2、升降装置7az和抓取装置7a
‑
3;7ax是纵向固定轨道;7ay是横向移动轨道;7a
‑
1是纵向移动机架;7a
‑
2是横向移动架;7az是升降装置;7a
‑
3是抓取装置;7b是通用机器人; 8是转换装置,包括纵向轨道8x、纵向移动架8
‑
1、纵向移动架8
‑
1中的铅直导轨8z和铅直移动架8
‑
2;8x是纵向轨道;8
‑
1是纵向移动架;8z是铅直导轨;8
‑
2是铅直移动架,包括装配托盘架8
‑
3、周转托盘架8
‑
4、小托盘推拉装置8
‑
5和拣选作业装置1b
‑
2;8
‑
3是装配托盘架;8
‑
4是周转托盘架;8
‑
5是小托盘推拉装置;1b
‑
2是拣选作业装置;9是 拣选堆垛机,包括双伸缩货叉9
‑
1、小桁架机器人9
‑
2;9
‑
1是双伸缩货叉;9
‑
2是小桁架机器人; 10是多层厂房,包括地下室10
‑
0、一层厂房10
‑
1、二层厂房10
‑
2和三层厂房10
‑
3;10
‑
0是地下室;10
‑
1是一层厂房,包括总装作业区1a
‑
101;1a
‑
101是总装作业区;10
‑
2是二层厂房,包括部件装配作业区1a
‑
102;1a
‑
102是部件装配作业区;10
‑
3是三层厂房,包括多层拣选作业区1b
‑
103;1b
‑
103是多层拣选作业区;2
‑
10是多层立体仓库,包括位于中间的中间立体仓库2
‑
101和位于两侧的两侧立体仓库2
‑
102两种结构;2
‑
101是中间立体仓库;2
‑
102是两侧立体仓库;10
‑3‑
1是托架;6
‑
1a
‑
1是待装配零件;6
‑
1a
‑
2是待装配部件;6
‑
1b
‑
1是待拣选零件; 5a1是活动式装配移出装置;5a1
‑
2是推拉装置;5a1
‑
1是通用伸缩轨道;5b
‑
101是一层固定式托盘移出装置;5b
‑
102是二层固定式托盘移出装置;5a
‑
103是三层活动式托盘移出装置;11是 托盘输送装置,包括具有顶升和回转功能的托盘rgv输送车11r或具有顶升
和回转功能的托盘agv输送车11a;11r是具有顶升和回转功能的托盘rgv输送车;11a是具有顶升和回转功能的托盘agv输送车;2
‑2‑
1是输送车货格;12是产品托盘; 13是底层rgv输送。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
26.如图1和图2所示,生产作业区1包括作业工位1
‑
1、作业装置1
‑
2和立体仓库2,生产作业区1包括装配作业区1a和拣选作业区1b,作业工位1
‑
1包括装配作业区1a的装配作业工位1a
‑
1和拣选作业区1b的拣选作业工位1b
‑
1,作业装置1
‑
2包括装配作业装置1a
‑
2和拣选作业装置1b
‑
2; 立体仓库2包括托盘3、堆垛机4、货架2
‑
1、货格2
‑
2、巷道2
‑
3和托盘移出装置5,装配作业工位1a
‑
1包括需装配的产品6,托盘3的上方包括产品6上的零部件6
‑
1,零部件6
‑
1包括待装配零部件6
‑
1a和待拣选零部件6
‑
1b,托盘3包括装配托盘3a和拣选托盘3b,装配托盘3a放置的是待装配零部件6
‑
1a,拣选托盘3b放置的是待拣选零部件6
‑
1b;货架2
‑
1包括若干个货格2
‑
2,托盘3存储在货格2
‑
2内,立体仓库2包括存储装配托盘3a的装配立体仓库2a,装配作业区1a包括装配立体仓库2a;托盘移出装置5包括托盘移出导轨5
‑
1和架外移出装置5
‑
2,托盘移出导轨5
‑
1安装在货架2
‑
1上,架外移出装置5
‑
2将货格2
‑
2内的托盘3通过托盘移出导轨5
‑
1移出至货格2
‑
2外,或将货格2
‑
2外托盘移出导轨5
‑
1上的托盘3移入至货格2
‑
2内;位于装配作业区1a的装配作业装置1a
‑
2将移至装配货格2a
‑
2外托盘移出导轨5
‑
1上的装配托盘3a上方的待装配零部件6
‑
1a取出,或将装配托盘3a从装配货格2a
‑
2外的托盘移出导轨5
‑
1上取走,在装配作业工位1a
‑
1将待装配零部件6
‑
1a装配在产品6上;位于拣选作业区1b的拣选作业装置1b
‑
2将移至货格2
‑
2外托盘移出导轨5
‑
1上的拣选托盘3b上方的待拣选零部件6
‑
1b取出,或将拣选托盘3b从拣选货格2b
‑
2外的托盘移出导轨5
‑
1上取走,在拣选作业工位1b
‑
1将待拣选零部件6
‑
1b放置在货格2
‑
2外的装配托盘3a上变成待装配零部件6
‑
1a,拣选作业装置1b
‑
2将装配托盘3a通过托盘移出装置5移至货格2
‑
2内,通过在巷道2
‑
3内运行的堆垛机4将货格2
‑
2内的装配托盘3a运行至装配立体仓库2a,放置在设定在装配货格2a
‑
2内,即通过堆垛机4实现托盘3在各货格2
‑
2之间的输送。
27.如图3与图4所示,作业装置1
‑
2包括操作工1
‑2‑
1、机械手臂1
‑2‑
2、小行车1
‑2‑
3和机器人7;机器人7包括桁架机器人7a和通用机器人7b两种结构,桁架机器人7a包括纵向固定轨道7ax、横向移动轨道7ay、纵向移动机架7a
‑
1、横向移动架7a
‑
2、升降装置7az和抓取装置7a
‑
3,抓取装置7a
‑
3固定在升降装置7az的底部,升降装置7az固定在横向移动架7a
‑
2上,横向移动架7a
‑
2在横向移动轨道7ay上沿y方向运行,横向移动轨道7ay固定在纵向移动机架7a
‑
1上,纵向移动机架7a
‑
1在纵向固定轨道7ax上沿着x方向运行,纵向固定轨道7ax固定在厂房建筑物上;通用机器人7b是多轴关节机器人。
28.如图4和图5所示,拣选作业装置1b
‑
2包括转换装置8,转换装置8位于货格2
‑
2的外侧,包括纵向轨道8x、纵向移动架8
‑
1、纵向移动架8
‑
1中的铅直导轨8z和铅直移动架8
‑
2,纵向移动架8
‑
1在纵向轨道8x上运行,铅直移动架8
‑
2在铅直导轨8z上运行,铅直移动架8
‑
2包括装配托盘架8
‑
3、周转托盘架8
‑
4、小托盘推拉装置8
‑
5和拣选作业装置1b
‑
2,装配托盘架8
‑
3、周转托盘架8
‑
4和小托盘推拉装置8
‑
5是托盘移出装置5的组成部分,通过小托盘推拉
装置8
‑
5将货格2
‑
2内的装配托盘3a拉出至装配托盘架8
‑
3上,将周转托盘3b拉出至周转托盘架8
‑
4上,拣选作业装置1b
‑
2对周转托盘3b上的待拣选零部件6
‑
1b进行拣选后放入装配托盘3a上,成为待装配零部件6
‑
1a,通过小托盘推拉装置8
‑
5将周转托盘架8
‑
4上的周转托盘3b或装配托盘架8
‑
3上的装配托盘3a推入货格2
‑
2内,转换装置8也可以位于装配立体仓库2a的上方。
29.如图1和图2所示,托盘移出装置5包括活动式托盘移出装置5a和固定式托盘移出装置5b,活动式托盘移出装置5a中的托盘移出导轨5
‑
1为伸缩轨道5a
‑
1,架外移出装置5
‑
2为导轨推拉装置5a
‑
2,当导轨推拉装置5a
‑
2将伸缩轨道5a
‑
1推回时,伸缩轨道5a
‑
1位于货格2
‑
2之内,当导轨推拉装置5a
‑
2将伸缩轨道5a
‑
1拉出时,伸缩轨道5a
‑
1连同其上方的托盘3均位于货格2
‑
2之外;通过导轨推拉装置5a
‑
2将货格2
‑
2内的伸缩轨道5a
‑
1拉出至货格2
‑
2外,伸缩轨道5a
‑
1上方的托盘3随之移出至货格2
‑
2外,作业装置1
‑
2将移至货格2
‑
2外的托盘3上方的零部件6
‑
1取出,或将托盘3从伸缩轨道5a
‑
1上取走,在拣选作业工位1b
‑
1将拣选托盘3b上的待拣选零部件6
‑
1b经拣选后,放置在装配托盘3a上变成待装配零部件6
‑
1a,或在装配作业工位1a
‑
1将装配托盘3a上的待装配零部件6
‑
1a装配在产品6上;通过导轨推拉装置5a
‑
2将位于货格2
‑
2外的伸缩轨道5a
‑
1推回至货格2
‑
2内,再通过堆垛机4对伸缩轨道5a
‑
1上的托盘3进行输送;固定式托盘移出装置5b中的托盘移出导轨51为固定式托盘移出导轨5b
‑
1,架外移出装置5
‑
2为托盘推拉装置5b
‑
2,固定式托盘移出导轨5b
‑
1包括位于货格2
‑
2之内的货格内轨道5b
‑1‑
1和位于货格2
‑
2之外的货格外轨道5b
‑1‑
2,当托盘推拉装置5b
‑
2将托盘3推回时,托盘3位于货格内轨道5b
‑1‑
1,当托盘推拉装置5b
‑
2将托盘3拉出时,托盘3位于货格外轨道5b
‑1‑
2;通过托盘推拉装置5b
‑
2将货格内轨道5b
‑1‑
1上的托盘3拉出至货格外轨道5b
‑1‑
2上;作业装置1
‑
2将移至货格外轨道5b
‑1‑
2的托盘3上方的零部件6
‑
1取出,或将托盘3从货格外轨道5b
‑1‑
2上取走,在拣选作业工位1b
‑
1将拣选托盘3b上的待拣选零部件6
‑
1b经拣选后,放置在装配托盘3a上变成待装配零部件6
‑
1a,或在装配作业工位1a
‑
1将装配托盘3a上的待装配零部件6
‑
1a装配在产品6上;通过托盘推拉装置5b
‑
2将货格外轨道5b
‑1‑
2上的托盘3推回至货格内轨道5b
‑1‑
1上,再通过堆垛机4对货格内轨道5b
‑1‑
1上的托盘3进行输送。
30.如图6所示,作业装置1
‑
2也是架外移出装置5
‑
2,通用机器人7b也是活动式装配移出装置5a1中的通用导轨推拉装置5a1
‑
2,即通过通用机器人7b将装配货格2a
‑
2内的通用伸缩轨道5a1
‑
1拉出至装配货格2a
‑
2外,或将装配货格2a
‑
2外的通用伸缩轨道5a1
‑
1推回至货格2
‑
2内;桁架机器人7a也是固定式装配移出装置5a2中的桁架托盘推拉装置5a2
‑
2,即通过桁架机器人7a将货格2
‑
2内的托盘3拉出至货格2
‑
2外;或将货格2
‑
2外的托盘3推回至货格2
‑
2内;操作工1
‑2‑
1既是活动式装配移出装置5a1中的通用导轨推拉装置5a1
‑
2,也是固定式装配移出装置5a2中的桁架托盘推拉装置5a2
‑
2;转换装置8中装配托盘架8
‑
3上的空装配托盘3a需放置m种零部件6
‑
1,对应的m种零部件6
‑
1的m种待拣选零部件6
‑
1b分别位于m个不同位置的拣选货格2b
‑
2内的拣选托盘3b上,通过转换装置8将周转托盘架8
‑
4对准设定的拣选货格2b
‑
2内的拣选托盘3b,经小托盘推拉装置8
‑
5将拣选托盘3b拉至周转托盘架8
‑
4上,用拣选作业装置1b
‑
2将拣选托盘3b上的待拣选零部件6
‑
1b放置在装配托盘3a上,变成待装配零部件6
‑
1a,再将周转托盘架8
‑
4上的拣选托盘3b推至原拣选货格2b
‑
2内,转换装置8再将周转托盘架8
‑
4对准另一设定的拣选货格2b
‑
2内的拣选托盘3b,装配托盘3a在装配托盘
架8
‑
3上跟随转换装置8运行,直至完成m种待装配零部件6
‑
1a的放置,再通过小托盘推拉装置8
‑
5推至空货格2
‑
2内,通过堆垛机4将载有m种待装配零部件6
‑
1a的装配托盘3a放置在装配立体仓库2a中设定的装配货格2a
‑
2内。
31.如图7和图8所示,堆垛机4为具有转换装置8功能的拣选堆垛机9,拣选堆垛机9包括双伸缩货叉9
‑
1、小桁架机器人9
‑
2,当位于巷道2
‑
3的双伸缩货叉9
‑
1上分别载有拣选托盘3b和装配托盘3a,通过小桁架机器人9
‑
2下方的拣选抓取装置9
‑2‑
1将拣选托盘3b上的待拣选零部件6
‑
1b放置在装配托盘3a上变成待装配零部件6
‑
1a,拣选堆垛机9将伸缩货叉9
‑
1上的拣选托盘3b放置在原货格2
‑
2内,再运行至装配立体仓库2a将另一伸缩货叉9
‑
1上的装配托盘3a放置在设定的装配货格2a
‑
2内。
32.如图7~图9所示,生产作业区1包括托盘3的托盘输送装置11,托盘输送装置11包括具有顶升和回转功能的托盘rgv输送车11r或具有顶升和回转功能的托盘agv输送车11a,通过托盘输送装置11实现托盘3在装配作业工位1a
‑
1、拣选作业工位1b
‑
1、立体仓库2之间的运行;货格2
‑
2包括与底层地面或楼层板相连的输送车货格2
‑2‑
1,通过托盘rgv输送车11r或托盘agv输送车11a,将装配托盘3a或周转托盘3b运离输送车货格2
‑2‑
1,或将装配托盘3a或周转托盘3b运入并存储在输送车货格2
‑2‑
1内。
33.如图10所示,生产作业区1包括多层厂房10,多层厂房10包括地下室10
‑
0、一层厂房10
‑
1、二层厂房10
‑
2和三层厂房10
‑
3,一层厂房10
‑
1包括总装作业区1a
‑
101,二层厂房10
‑
2包括部件装配作业区1a
‑
102,三层厂房10
‑
3包括多层拣选作业区1b
‑
103,多层厂房10包括多层立体仓库2
‑
10,多层立体仓库2
‑
10包括位于中间的中间立体仓库2
‑
101和位于两侧的两侧立体仓库2
‑
102两种结构,多层立体仓库2
‑
10包括位于一层厂房10
‑
1的一层固定式托盘移出装置5b
‑
101、位于二层厂房10
‑
2的二层固定式托盘移出装置5b
‑
102和位于三层厂房10
‑
3的三层活动式托盘移出装置5a
‑
103;多层拣选作业区1b
‑
103包括若干托架10
‑3‑
1,通过托盘rgv输送车11r或托盘agv输送车11a实现托盘3在输送车货格2
‑2‑
1和托架10
‑3‑
1之间的输送,堆垛机4将空装配托盘3a和携带待拣选零件6
‑
1b
‑
1的拣选托盘3b放置多层立体仓库2
‑
10在三层厂房10
‑
3内的货格2
‑
2中,三层厂房10
‑
3包括桁架机器人7a,桁架机器人7a同时也是导轨推拉装置5a
‑
2,在多层拣选作业区1b
‑
103将拣选托盘3b上的待拣选零件6
‑
1b
‑
1经拣选后,放置在装配托盘3a上变成待装配零件6
‑
1a
‑
1,再将托盘3推回货格2
‑
2内;二层厂房10
‑
2包括通用机器人7b,堆垛机4将携带待拣选零件6
‑
1b
‑
1的拣选托盘3b放置多层立体仓库2
‑
10在二层厂房10
‑
2内的货格2
‑
2中,通用机器人7b同时也是托盘推拉装置5b
‑
2,在部件装配作业区1a
‑
102将若干待装配零件6
‑
1a
‑
1在装配托盘3a上装配成待装配部件6
‑
1a
‑
2;一层厂房10
‑
1包括若干柔性并联装配工位1a
‑1‑
101,并联装配工位1a
‑1‑
101包括产品托盘12,地下室10
‑
0包括位于并装配工位1a
‑1‑
101下方的底层rgv输送车13,通过底层rgv输送车13实现产品托盘12在各并联装配工位1a
‑1‑
101之间的任意输送;堆垛机4将携带待装配零件6
‑
1a
‑
1和待装配部件6
‑
1a
‑
2的装配托盘3a放置多层立体仓库2
‑
10在一层厂房10
‑
1内的装配货格2a
‑
2中,总装作业区1a
‑
101包括若干操作工1
‑2‑
1,操作工1
‑2‑
1同时也是托盘推拉装置5b
‑
2,在总装作业区1a
‑
101将装配托盘3a上的待装配零件6
‑
1a
‑
1和待装配部件6
‑
1a
‑
2在产品托盘12上进行装配,总装成产品6。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1