自动装车机的制作方法
1.本实用新型涉及物料输送技术领域,特别涉及一种自动装车机。
背景技术:
2.现有自动装车机当需要遇到障碍物时,当障碍物触碰装机车出现故障时才能发现以进行维修,存在安全隐患。因此,如何降低自动装车机的安全隐患,是本领域技术人员亟待解决的技术问题。
技术实现要素:
3.本实用新型的目的是提供一种自动装车机,以降低自动装车机的安全隐患。
4.为实现上述目的,本实用新型提供一种自动装车机,包括自动装车机主体,设置在所述自动装车机主体上的用于感应故障或障碍物的自我保护机构和与所述自我保护机构连接,且能够在所述自我保护机构感应到故障或障碍物时进行响应并将所述自动装车机主体初始化至安全位置的控制机构。
5.优选地,所述自动装车机主体包括码包总成机架、升降提升机构、装车码包主机和主机行走机构,其中,所述主机行走机构设置在所述码包总成机架的底部,所述升降提升机构的固定端设置在所述码包总成机架上,所述装车码包主机设置在所述升降提升机构的升降端。
6.优选地,所述自我保护机构包括设置在所述装车码包主机上的至少一组检测组件。
7.优选地,所述检测组件为两组,分别为第一检测组件和第二检测组件,其中,所述第一检测组件设置在所述装车码包主机的前端,所述第二检测组件设置在所述装车码包主机的后端。
8.优选地,所述检测组件为雷达检测组件、超声波检测组件、激光检测组件或者图像检测组件。
9.优选地,还包括与所述控制机构连接的报警机构。
10.优选地,所述报警机构与所述控制机构通过有线或者无线通讯连接。
11.优选地,所述报警机构为声音报警机构、光报警机构或者声光报警机构。
12.优选地,所述控制机构设置在所述主机行走机构上。
13.优选地,所述控制机构通过有线或者无线与所述自我保护机构通讯连接。
14.使用本实用新型的自动装车机时,当有故障或障碍出现时,自我保护机构被触发,控制机构响应自我保护机构,然后将所述自动装车机主体初始化至安全位置,从而降低了自动装车机的安全隐患。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例
或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
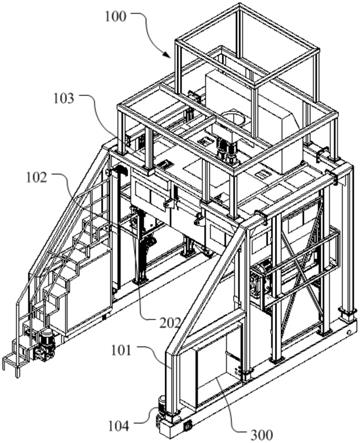
16.图1为本实用新型实施例所提供的自动装车机的立体结构示意图;
17.图2为本实用新型实施例所提供的自动装车机的主视结构示意图;
18.图3为本实用新型实施例所提供的自动装车机的俯视结构示意图。
19.其中:100为自动装车机主体、200为自我保护机构、300为控制机构、101为码包总成机架、102为升降提升机构、103为装车码包主机、104为主机行走机构、201为第一检测组件、202为第二检测组件。
具体实施方式
20.本实用新型的核心是提供一种自动装车机,以降低自动装车机的安全隐患。
21.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和实施方式对本实用新型作进一步的详细说明。
22.请参考图1至图3,本实用新型公开的自动装车机,包括自动装车机主体100,设置在自动装车机主体100上的用于感应到故障或障碍物的自我保护机构200和与自我保护机构200连接,且能够在自我保护机构200感应到故障或障碍物时进行响应并将自动装车机主体100初始化至安全位置的控制机构300。使用本实用新型的自动装车机时,当有故障或障碍物出现时,自我保护机构200被触发,控制机构300响应自我保护机构200,然后将自动装车机主体100初始化至安全位置,从而降低了自动装车机100的安全隐患。
23.需要说明的是,自动装车机主体100初始化至安全位置,可以理解为切断自动装车机主体100上对应驱动电源,以使得自动装车机主体100上对应的运行部件停止运行;或者自动装车机主体100初始化至安全位置可以理解为确保安全的位置,例如当自动装车机主体在预设方向运行一段时间后感应到故障或障碍物,控制机构控制自动装机车主体在于预设方向相反的方向运行至确保安全的位置后停机。
24.本实用新型其中一个实施例中,自动装车机主体100包括码包总成机架101、升降提升机构102和装车码包主机103,其中,升降提升机构102的固定端设置在码包总成机架101上,装车码包主机103设置在升降提升机构102的升降端。使用时物料包进入至自动装车机100中,并通过升降提升机构102和装车码包主机103进行码包装车。
25.针对上述情况,自我保护机构200包括设置在装车码包主机103上的至少一组检测组件。通过检测组件来判断该自动装车机100移动方向上是否有故障或障碍物,检测组件的组数越多,那么,可判断的方位越多。
26.例如,该自我保护机构200包括两组检测组件,分别为第一检测组件201和第二检测组件202,其中,第一检测组件201设置在装车码包主机103的前端,第二检测组件202设置在装车码包主机103的后端。当第一检测组件201或第二检测组件202被障碍物触发时,控制机构300初始化至升降提升机构102的安全位置。该升降提升机构102带动装车码包主机103做向下运动和向上运动。
27.当装车码包主机103在升降提升机构102的作用下向下运动过程中,前方遇到故障或障碍物时,第一检测组件201被触发,控制机构300初始化至降提升机构102的安全位置。
此安全位置为:切断升降提升机构102的驱动电源后,升降提升机构102停止运行时,以使得装车码包主机103停止下降时所处的位置。或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
28.当装车码包主机103在升降提升机构102的作用下向下运动过程中,后方遇到故障或障碍物时,第二检测组件202被触发,控制机构300初始化至升降提升机构102的安全位置。此安全位置为:切断升降提升机构102的驱动电源后,升降提升机构102停止运行,以使得装车码包主机103停止下降时所处的位置。或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
29.进一步,该自我保护机构200还包括另外两个检测组件分别为第三检测组件和第四检测组件,其中,第三检测组件设置在装车码包主机103的左侧,第四检测组件设置在装车码包主机103的右侧;当第三检测组件或第四检测组件被障碍物触发时,控制机构300初始化至升降提升机构102的安全位置。
30.当装车码包主机103在升降提升机构102的作用下向下运动过程中,左侧遇到故障或障碍物时,第三检测组件被触发,控制机构300初始化至升降提升机构102的安全位置。此安全位置为:切断升降提升机构102的驱动电源后,升降提升机构102停止运行,以使得装车码包主机103停止下降时所处的位置。或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
31.当装车码包主机103在升降提升机构102的作用下向下运动过程中,右侧遇到故障或障碍物时,第四检测组件被触发,控制机构300初始化值升降提升机构102的安全位置。此安全位置为,切断升降提升机构102的驱动电源后,升降提升机构102停止运行,以使得装车码包主机103停止下降时所处的位置。或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
32.或者,该自动装车机主体100包括码包总成机架101、升降提升机构102、装车码包主机103和主机行走机构104,其中,主机行走机构104设置在码包总成机架101的底部,升降提升机构102的固定端设置在码包总成机架101上,装车码包主机103设置在升降提升机构102的升降端。通过主机行走机构104移动到物料包的位置,然后物料包进入至自动装车机100中,并通过升降提升机构102的和装车码包主机103进行码包装车。
33.针对上述情况,自我保护机构200包括设置在装车码包主机103上的至少一组检测组件。通过检测组件来判断该自动装车机100移动方向上是否有障碍物,检测组件的组数越多,那么,可判断的方位越多。
34.例如,检测组件为两组,分别为第一检测组件201和第二检测组件202,其中,第一检测组件201设置在装车码包主机103的前端,第二检测组件202设置在装车码包主机103的后端;当第一检测组件201或第二检测组件202被障碍物触发时,控制机构300初始化至升降提升机构102的安全位置或初始化至主机行走机构104的安全位置。
35.当装车码包主机103在升降提升机构102的作用下向下运动过程中,前方遇到故障或障碍物时,第一检测组件201被触发,控制机构300初始化至升降提升机构102的安全位置。此安全位置为:切断升降提升机构102的驱动电源后,升降提升机构102停止运行,以使得装车码包主机103停止下降时所处的位置。或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
36.当装车码包主机103在升降提升机构102的作用下向下运动过程中,后方遇到故障或障碍物时,第二检测组件202被触发,控制机构300初始化至升降提升机构102的安全位置。此安全位置为:切断升降提升机构102的驱动电源后,升降提升机构102停止运行,以使得装车码包主机103停止下降。进一步的,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
37.当装车码包主机103在主机行走机构104的作用下向前运动过程中,前端前方遇到故障或障碍物时,第一检测组件201被触发,控制机构300初始化至切断主机行走机构104的驱动电源安全位置。此安全位置为:切断主机行走机构104的驱动电源后,主机行走机构104停止运行,以使得装车码包主机103停止下降移动时所处的位置,或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
38.当装车码包主机103在主机行走机构104的作用下向后运动过程中,后方遇到故障或障碍物时,第二检测组件202被触发,控制机构300初始化至主机行走机构104的安全位置。此安全位置为,切断主机行走机构104的驱动电源后,主机行走机构104停止运行,以使得装车码包主机103停止移动时所处的位置,或者,该控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
39.进一步,该自我保护机构200还包括另外两个检测组件分别为第三检测组件和第四检测组件,其中,第三检测组件设置在装车码包主机103的左侧,第四检测组件设置在装车码包主机103的右侧;当第三检测组件或第四检测组件被障碍物触发时,控制机构300切断升降提升机构102的驱动电源,或者控制机构300控制升降提升机构102将装车码包主机103上升回到确保自身安全的位置。
40.当装车码包主机103在升降提升机构102的作用下向下运动过程中,左侧遇到故障或障碍物时,第三检测组件被触发,控制机构300初始化至升降提升机构102的安全位置。
41.当装车码包主机103在升降提升机构102的作用下向下运动过程中,右侧遇到故障或障碍物时,第四检测组件被触发,控制机构300初始化至升降提升机构102的安全位置。
42.上述检测组件为雷达检测组件、超声波检测组件、激光检测组件或者图像检测组件等等,只要能够判断出装车码包总机的带判断方位上存在障碍物即可,该方位包括前方、后方、左侧、右侧。
43.进一步的,为了提醒操作人员及时维修,该自我保护系统还包括报警机构,当自我保护机构200被障碍物触发时,控制机构300还开启报警机构的驱动电源。当自我保护机构200被碍物被触发时,控制机构300切断自动装车机100对应的驱动电源外,开启报警机构的驱动电源,以提醒操作人员进行维修或者处理障碍物。
44.报警机构与控制机构300通过有线或者无线通讯连接,当为无线连接时,可以为红外线、蓝牙、wifi连接,用于进行数据交互。
45.报警机构为声音报警机构、光报警机构或者声光报警机构。
46.需要说明的是,本实用新型中自我保护机构200的作用是检测障碍物,当有障碍物时,会触发自我保护机构200,而自我保护机构200会将触发信号传递给控制机构300,该控制机构300响应该触发信号,并切断自动装车机100对应的驱动电源,通过切断驱动电源实现自动装车机100对应部件的停止,以避免触碰障碍物。且上述控制机构300为现有技术,其并不涉及计算机内部程序以及协议的改进。控制机构300通过有线或者无线与自我保护机
构200通讯连接,当为无线连接时,可以为红外线、蓝牙、wifi连接,用于进行数据交互。而控制机构300设置在主机行走机构104上。或者设置在其他部位上,只要能够实现控制机构300与自我保护机构200的数据交互均在本实用新型的保护范围内。
47.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
48.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1