一种微通道换热器侧板的输送装置的制作方法
1.本发明涉及一种微通道换热器侧板的输送装置。
背景技术:
2.微通道换热器芯体一般由扁管、翅片、主板、侧板组成,芯体的组装一般通过组装机来完成,早期全部是通过人工组装完成的,效率非常低。目前扁管和翅片的间隔排布基本可以实现自动化,主板的安装也基本实现了自动化,但侧板的组装还是通过人工完成的,完成侧板和主板的安装后,再通过芯装机完成芯体的最终组装。为了安全起见,防止在芯体组装过程中,人工误进入组装区,所以在芯装机组装区外侧设置有安全光栅,而人工放侧板时,每次需要遮挡光栅,其他组装停止,待进入组装区安放完侧板后,手动按键复位,继续进行芯体组装。这样安放侧板容易对操作者存在安全隐患,而且生产效率低,不利于芯体组装的自动化连线。同时每组装一个芯体,劳动者就需要放置一次侧板,不利于解放劳动力。
技术实现要素:
3.本发明所要解决的技术问题是克服现有技术的上述缺陷而提供一种微通道换热器侧板的输送装置,其可大量存储侧板并自动输送侧板到芯体组装区。
4.本发明解决上述技术问题所采用的技术方案为:一种微通道换热器侧板的输送装置,其包括存储机构和输送机构;所述存储机构包括转盘、转盘驱动机构、料仓,所述转盘与转盘驱动机构连接并由转盘驱动机构旋转,并设置与料仓对应的缺口,所述料仓安装在转盘的缺口上;所述输送机构包括抬升机构、吸附机构、中间存储机构和抓放机构;所述抬升机构包括抬升板和抬升板驱动机构,所述抬升板与抬升板驱动机构连接并由抬升板驱动机构驱动而上下运动,抬升板可通过转盘上的缺口而从中间托住侧板;侧板储存在料仓中并由转盘驱动机构驱动转盘至指定位置,侧板由存储机构抬升后由吸附机构吸附至中间存储机构,并由抓放机构抓至使用场所。
5.更具体地,所述料仓包括第一容纳板和第二容纳板,所述第一容纳板和第二容纳板间隔一定距离且相对设置,所述第一容纳板和第二容纳板其上分别设置容纳槽,所述侧板的两端放入第一容纳板和第二容纳板的容纳槽内而固定。
6.更好地,还设置距离调节机构,距离调节机构与第一容纳板或第二容纳板连接并使第一容纳板或第二容纳板移动,从而改变第一容纳板与第二容纳板之间的距离,以适应不同长度的侧板。
7.更好地,所述距离调节机构为连杆机构,所述连杆驱动机构包括丝杆、手轮、螺母座和与料仓数量一致的连杆组;所述丝杆下端由转盘滚动支撑,上端通过支撑架滚动支撑,所述支撑架安装在转盘上,所述手轮与丝杆上端旋接在一起,所述螺母座穿套在丝杆外,其与各个连杆组枢轴连接;所述连杆组包括第一连杆、第二连杆和第三连杆,所述第一连杆一端与螺母座枢轴连接,另一端与第二容纳板枢轴连接,所述第二连杆一端与螺母座枢轴连接,另一端与第三连杆的一端枢轴连接,所述第三连杆的另一端与第一连杆的中部枢轴连
接。由此,可通过转动手轮带动丝杆转动,从而带动丝杆螺母座上下移动,从而使连杆组带动第二容纳板接近或远离第一容纳板,以放置不同长度的侧板。
8.更好地,所述第一容纳板和第二容纳板分别设置两个或两个以上的容纳侧板的容纳槽,容纳槽可相同或不同,这样可以多组同时存储和运输,也可根据产品规格变化,方便产品切换。
9.更具体地,所述转盘驱动机构包括凸轮分割器,通过凸轮分割器使转盘停止位置准确可靠,而且结构简单紧凑。
10.更具体地,所述抬升板驱动机构为抬升板伺服模组,所述抬升板安装在抬升板伺服模组的滑台上。
11.更好地,所述吸附机构包括平移架、平移架驱动机构和吸盘组件,吸盘组件连接在平移架上,平移架与平移架驱动机构连接并由其驱动而平移。
12.更具体地,所述平移架驱动机构为平移架伺服模组,所述平移架安装在平移架伺服模组的滑台上。
13.更好地,还设置了垂直移动机构,具体为上下气缸,所述吸盘组件包括吸盘、吸盘安装板,吸盘安装在吸盘安装板上,吸盘安装板与上下气缸的活塞杆连接,由此通过上下气缸的作用带动吸盘安装板及其上的吸盘上下移动。
14.更好地,还设置了与平移架驱动机构驱动方向垂直的第一驱动机构,具体为第一平移气缸,所述第一平移气缸安装在平移架上,其与吸盘组件连接,第一平移气缸驱动带动吸盘组件水平往复移动,所述吸盘组件与平移架之间还设置导向机构,这样可以使吸盘组件平稳移动。
15.更好地,还增加了第二平移气缸,第二平移气缸安装在安装板上,其与上下气缸安装板连接,通过第二平移气缸的驱动,带动上下气缸安装板水平往复移动,还在上下气缸安装板和安装板之间设置了导向机构,这样可以使上下气缸安装板平稳移动。
16.更好地,所述中间存储机构包括存储定位板、侧板定位机构、存储定位板升降机构,存储定位板中设置容纳侧板的槽并可由侧板定位机构定位,槽侧设置允许夹爪进入的缺口,存储定位板与存储定位板升降机构连接并由其升降。
17.更具体地,所述存储定位板升降机构包括安装柱、抬升气缸,所述安装柱安装在机架上,所述抬升气缸安装在安装柱上,抬升气缸与存储定位板连接,通过抬升气缸的驱动带动存储定位板上下移动,向上使下述抓放机构抓取侧板,向下避让使抓放机构能将侧板夹走而放到芯体组装区。
18.所述侧板定位机构包括定位气缸、推动架、推杆和弹簧,所述定位气缸安装在定位板上,其与推动架连接,所述推杆穿过推动架,一端设有限位凸台,另一端安装推动头,所述弹簧穿套在推杆上,并位于推动架和推动头之间,当所述吸附机构从料仓将侧板吸附并放置在容纳槽内后,定位气缸启动,带动推动架移动,弹簧受到压缩,使推动头推动侧板并将侧板顶到限位面,侧板被抓放机构夹走后,定位气缸复位。
19.更好地,所述抓取机构包括移动架、移动架驱动机构、移动架升降机构、夹爪、夹爪旋转机构、夹爪平移机构,所述移动架与移动架驱动机构、移动架升降机构连接并由移动架驱动机构平移和移动架升降机构升降,所述夹爪连接在夹爪旋转机构、夹爪平移机构上并由夹爪旋转机构旋转和夹爪平移机构平移。
20.更具体地,所述移动架驱动机构安装在机架上,移动架驱动机构为移动架伺服模组,所述移动架安装在移动架伺服模组的滑台上。
21.更具体地,所述移动架升降机构包括升降气缸、升降架,升降气缸安装在移动架上,其与升降架连接。
22.更具体地,所述夹爪旋转机构包括旋转气缸,所述旋转气缸安装在升降架上,其与平移气缸安装板连接,更具体地,所述夹爪平移机构包括平移气缸,所述平移气缸安装在平移气缸安装板上,其与夹爪气缸安装板连接。
23.更好地,所述夹爪包括夹爪气缸,夹爪气缸安装在夹爪气缸安装板上,夹爪由夹爪气缸开合。
24.为了更好地夹住侧板,所述的夹爪气缸安装板两侧分别安装一个夹爪气缸,这样可通过两个夹爪夹取一个侧板。
25.更具体地,所述存储机构和输送机构都设置在机架上。
26.与现有技术相比,本发明的优点在于:采用旋转转盘存储侧板,存储量大,可实现不间断送料,而且延长了操作者补料的时间间隔,一定程度上解放了劳动力。通过输送机构,可将侧板自动放入组装区,无需人工进入组装区,保证了人身安全,提高了生产效率,有利于芯体组装的自动化连线。
附图说明
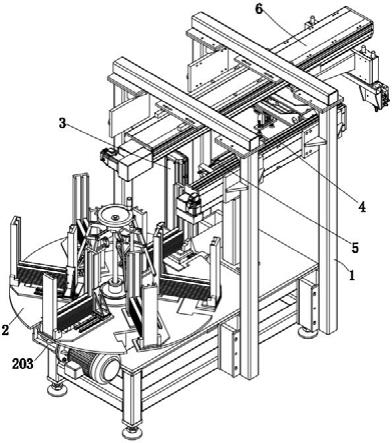
27.图1为本发明实施例一种微通道换热器侧板的输送装置的立体示意图。
28.图2为本发明实施例存储机构的立体示意图。
29.图3为本发明实施例连杆驱动机构的立体示意图。
30.图4为本发明实施例抬升机构的立体示意图。
31.图5为本发明实施例吸附机构的立体示意图。
32.图6为本发明实施例吸附机构的侧视图。
33.图7为本发明实施例中间存储机构的立体图。
34.图8为本发明实施例抓取机构的立体图。
具体实施方式
35.以下结合附图实施例对本发明作进一步描述。
36.如图1
‑
8所示,一种微通道换热器侧板的输送装置,包括机架1、存储机构2和输送机构。
37.所述存储机构和输送机构都设置在机架1上。
38.所述存储机构包括转盘201、料仓202以及转盘驱动机构。
39.所述转盘驱动机构安装在机架1上,所述转盘201与转盘驱动机构连接,其上设置与料仓对应的缺口2011,所述料仓202安装在转盘201上,其包括第一容纳板2021和第二容纳板2022,所述第一容纳板和第二容纳板间隔一定距离相对设置,这样就形成了一个料仓,所述第一容纳板和第二容纳板其上分别设置了容纳槽2023,所述侧板的两端刚好放入第一容纳板和第二容纳板的容纳槽2023内,并被很好的固定。本实施例中所述第一容纳板2021
和第二容纳板2022分别设置两个相同的容纳槽,并一一对应,根据产品规格变化,所述的两个容纳槽2023也可以不相同,以方便产品切换。
40.上述转盘201可通过转盘驱动机构带动而旋转一定的角度后停止,从而方便输送机构夹取侧板。
41.所述转盘驱动机构可采用多种方式,本实施例中采用凸轮分割器203驱动转盘201,其为标准件,可使驱动机构停止位置准确可靠,而且结构简单紧凑。也可以采用如电机驱动齿轮传动机构带动转盘转动或伺服电机直驱等方式。
42.根据生产节拍需要,存储更多的侧板,延长补料时间,所述料仓可以为多个,本实施例设置六个料仓沿转盘径向间隔排列。
43.如图3所示,为了适应不同长度的侧板,第二容纳板相对第一容纳板之间的距离通过连杆驱动机构是可以调整的,所述连杆驱动机构包括丝杆204、手轮205、螺母座206和六个连杆组。
44.所述丝杆下端由转盘滚动支撑,上端通过支撑架207滚动支撑,所述支撑架207安装在转盘201上,所述手轮205与丝杆204上端旋接在一起,所述螺母座206穿套在丝杆204外,其与各个连杆组枢轴连接。
45.所述连杆组包括第一连杆208、第二连杆209和第三连杆210,所述第一连杆208一端与螺母座206枢轴连接,另一端与第二容纳板2022枢轴连接,所述第二连杆209一端与螺母座206枢轴连接,另一端与第三连杆210的一端枢轴连接,所述第三连杆210的另一端与第一连杆208的中部枢轴连接。由此,可通过转动手轮205带动丝杆204转动,从而带动丝杆螺母座206上下移动,从而使连杆组带动第二容纳板2022接近或远离第一容纳板2021,以放置不同长度的侧板。
46.本实施例中通过手轮205驱动丝杆204转动,也可以通过电机带动丝杆转动,根据自动化水平和成本的要求可做选择。
47.所述输送机构包括抬升机构3、吸附机构4、中间存储机构5和抓放机构6。
48.所述抬升机构3包括:抬升板301和抬升板驱动机构。所述抬升板301可通过转盘201上的缺口2011,而从中间托住侧板10,所述抬升板驱动机构安装在机架1上,与抬升板301连接,带动抬升板301上下运动,本实施例抬升板驱动机构选用伺服模组302,所述伺服模组为标准件,所述抬升板301安装在伺服模组302的滑台3021上。
49.所述吸附机构4包括:包括平移架401、平移架驱动机构和吸盘组件。
50.所述平移架驱动机构安装在机架1上,与平移架401连接,带动平移架水平移动,方便安装在平移架上的吸盘403去吸附侧板,并将侧板放置到下述的中间存储机构5上的指定位置,本实施例平移架驱动机构选用伺服模组402,所述伺服模组为标准件,所述平移架401安装在伺服模组402的滑台4021上。
51.吸盘组件包括吸盘403和吸盘安装板404,吸盘403在吸附和放置侧板时,需要上下移动,所以还设置了上下气缸405,所述吸盘安装在吸盘安装板404上,吸盘安装板404与上下气缸405的活塞杆连接,由此通过上下气缸405的作用带动吸盘安装板404及其上的吸盘403上下移动。
52.为了方便将侧板放到下述的中间存储机构5上的两个容纳槽5032,以及吸附每个料仓的两个容纳槽2023内对应的侧板,所述吸盘403相对平移架401可水平移动以切换位
置。所以还设置了第一平移气缸406和第二平移气缸409,所述第一平移气缸406安装在平移架401上,其与第二平移气缸409的安装板407连接,通过第一平移气缸406的驱动带动安装板407水平往复移动,所述安装板407与平移架之间设置了滑块滑轨导向机构410,这样可以使安装板407平稳移动,所述第二平移气缸409安装在安装板407上,其与上下气缸安装板408连接,通过第二平移气缸409的驱动,带动上下气缸安装板408水平往复移动,同样在上下气缸安装板408和安装板407之间设置了滑块滑轨导向机构411,这样可以使上下气缸安装板408平稳移动。
53.虽然本实施例中采用第一平移气缸406和第二平移气缸409二个平移气缸及其相应的机构来达到吸盘组件的平移,但根据实际需要,也可只采用一个平移气缸及其相应的机构,这样,上述相应的部件和连接关系会有所改变,当然,此类的变化比较简单,在此不再详述。
54.所述中间存储机构5包括:安装柱501、抬升气缸502、存储定位板503、定位气缸504、推动架505、推杆506和弹簧507。
55.所述安装柱501安装在机架1上,所述抬升气缸502安装在安装柱501上,其与存储定位板503连接,所述定位板503上设置限位面5031和两个容纳槽5032,设置两个容纳槽5032是因为一个芯体一般需要组装两个侧板,其上还设置多个缺口5033,以方便下述抓取机构6抓取侧板,所述定位气缸504安装在定位板503上,其与推动架505连接,所述推杆506穿过推动架505,一端设有限位凸台5061,另一端安装有推动头5062,所述弹簧507穿套在推杆上,并位于推动架505和推动头5062之间,上述吸附机构4从料仓将侧板吸附并放置在容纳槽5032内,然后定位气缸504启动,带动推动架505移动,弹簧507受到压缩,使推动头5062推动侧板并将其顶到限位面5031,侧板被抓放机构夹走后,定位气缸504复位。通过抬升气缸502的驱动带动存储定位板503上下移动,向上使下述抓放机构6抓取侧板以及向下避让使抓放机构6能将侧板夹走而放到芯体组装区。
56.所述抓取机构6包括:移动架601、移动架驱动机构602、升降气缸603、升降架604、旋转气缸605、平移气缸606、平移气缸安装板607、夹爪气缸安装板608、夹爪气缸609和夹爪610。
57.所述移动架驱动机构602安装在机架1上,其与移动架601连接,本实施例移动架驱动机构选用伺服模组602,所述伺服模组为标准件,所述移动架601安装在伺服模组602的滑台6021上。所述升降气缸603安装在移动架601上,其与升降架604连接,所述旋转气缸605安装在升降架604上,其与平移气缸安装板607连接,所述平移气缸606安装在平移气缸安装板607上,其与夹爪气缸安装板608连接,所述夹爪气缸609安装在夹爪气缸安装板608上,其含有可开合的夹爪610。
58.为了更好地夹住侧板,在所述的夹爪气缸安装板608的两侧分别安装了一个夹爪气缸609和夹爪610,这样一个侧板就通过两个夹爪610夹取。
59.夹爪610还可以通过旋转气缸605旋转,图8中a处示意出了从容纳槽5032夹取两侧板时夹爪处于水平状态,b处则示意出了侧板被放到芯体组装区时夹爪610处于竖直状态。
60.本装置侧板运输过程如下。
61.1、转盘上的某个和全部料仓放满额定数量的侧板后,凸轮分割器203驱动转盘转动,其中一个料仓会旋转到抓取位置,等待输送机构抓取侧板。
62.2、抬升机构3从侧板下部抬升抓取位置料仓侧板,并使最上层的侧板到指定高度,伺服模组402带动平移架401移动吸盘403到抓取位置,上下气缸405下降,吸盘403下降吸附侧板10,然后吸盘上升复位,吸盘再移到中间存储机构5的容纳槽5032上方,吸盘403下降将侧板放入容纳槽5032内。与此同时,最上层侧板被取走后,抬升机构又抬升下一块侧板到指定高度。
63.3、吸盘向上复位,重复上面2步骤,去吸附下一块侧板,第二平移气缸409水平推动吸盘403到另一个容纳槽5032的上方,然后将侧板放入此容纳槽内。
64.4、两个容纳槽5032都放入侧板后,定位气缸504启动,使推动头5062推动侧板并将其顶到限位面5031,抬升气缸502抬升存储定位板503到指定高度。
65.5、两个旋转气缸605使夹爪610旋转而处于水平状态,平移气缸606使夹爪伸入缺口5033,夹爪气缸609使夹爪610闭合,夹住侧板,抬升气缸502使存储定位板503下降到指定位置,伺服模组602带动移动架601使夹爪610及其夹取的侧板移动到芯体组装区,与此同时,两个旋转气缸605使夹爪610旋转,从处于水平状态变为竖直状态。
66.6、侧板到达芯体组装区,升降气缸603使夹爪610下降,夹爪打开放置侧板,随后夹爪又回到水平状态,伺服模组602带动夹爪610返回,准备再次夹取侧板。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1