能对圆盘故障机器人进行调度搬运的机器人的制作方法
1.本发明涉及物流行业,具体涉及仓储系统,特别涉及一种能对圆盘故障机器人进行调度搬运的机器人。
背景技术:
2.现有技术中,在仓储物流领域中,经常会采取用于传送货物的机器人在仓储环境中进行货物的转移。例如,现有技术中最常使用的是圆盘机器人,是目前仓储物流中较为常见的物流运载工具。工作的模式也是驱动圆盘机器人运行至需要搬运的托盘的下方,通过支撑部件推顶托盘,实现托盘的获取,通过圆盘机器人的驱动装置驱动圆盘机器人载着托盘上的货物行驶至指定位置进行卸货。但是,机器设备在运行期间,也总有耗损故障的时候,这个时候就需要其他的搬运装置去将圆盘故障机器人搬离。
3.例如,现有技术中公开的 专利申请号:cn201711031058.2,专利名称:一种可升降可监控的智能搬运机器人;公开了: 一种可升降可监控的智能搬运机器人,包括搬运机器人本体,所述搬运机器人本体的下端设置有移动轮,且搬运机器人本体的前侧嵌入设置有扬声喇叭,所述搬运机器人本体的一侧上端设置有隔挡网,所述搬运机器人本体的上表面设置有撑物台。设置了隔挡网,能够增加撑物台的长度,增加撑物台上摆物的数量,同时也能起到挡物的作用,设置了摄像头,能够实时监控搬运机器人周围的环境及搬运机器人上物品的情况,设置了电动伸缩杆,能够自动升高和降低撑物台的高度,使工作人员工作起来更加便利,设置了远红外线感应器,能够感应搬运机器人附近的障碍物,进而提高搬运机器人的安全性能。
4.以及,专利申请号:cn202010393556.7,专利名称:一种物流搬运机器人;个性开了物流搬运机器人具有u型框架结构,所述u型框架中置有可升降叉板,所述u型框架的两侧布置有视觉传感器,所述u型框架的前侧和后侧布置有激光雷达。u型框架物流搬运机器人通过内嵌式可升降叉板,使得物流搬运机器人无论在搬运多重的货物时,其重心始终能维持在物流搬运机器人的内部中心处,为最佳搬运设计。同时,可升降叉板最低可降至地面高度,这可以应对几乎所有的搬运任务,通过与标准化化器具对接,适用范围极广,且不需要定制专属器具来承托或装载货物。
5.但是现有技术中仅仅具有转移运载的功能,不便于取放圆盘机器人,也不具有对圆盘机器人进行转移调度的功能;更不具有转移故障机器人上装载的货物。
技术实现要素:
6.本发明克服了现有技术的不足,提供一种能对圆盘故障机器人进行调度搬运的机器人,能对圆盘故障机器人上的货物进行转移,实现便捷有效的搬运调度,更适用于转移多种不同工作状态下的圆盘故障机器人。
7.为达到上述目的,本发明采用的技术方案为:一种能对圆盘故障机器人进行调度搬运的机器人,包括驱动座,所述驱动座的底部设置有若干个由所述驱动座驱动行走的行
走轮,所述驱动座上设置有升降机构,所述升降机构上驱动设置有能相对所述驱动座纵向升降的货叉;所述驱动座上还设置有转向座,所述转向座上驱动设置有能相对所述驱动座进行升降动作的取物装置,所述取物装置上设置有用于取物的吸取机构;所述驱动座上还设置有收纳机构,且所述收纳机构与所述货叉不在所述驱动座的同一侧;所述驱动座上还设置有探头或/和距离传感器。
8.本发明一个较佳实施例中,升降机构包括设置在所述驱动座上设置有若干条升降槽,所述升降槽内设置有若干个升降驱动装置,所述升降驱动装置驱动活动安装在所述升降槽上的货叉纵向位移。
9.本发明一个较佳实施例中,货叉采用的是货叉组件结构,所述货叉组件结构包括一对叉脚,所述叉脚的下方设置有若干个辅助轮;或/和,所述货叉组件的外侧设置有限位板,所述限位板与所述货叉组件之间预留有用于限位对接的限位槽。
10.本发明一个较佳实施例中,货叉组件的一对叉脚分别纵向滑动设置在所述驱动座的两侧。
11.本发明一个较佳实施例中,取物装置包括横向伸缩机构和升降臂,所述横向伸缩机构的一端与设置在驱动座的上部的转向座驱动连接,所述横向伸缩机构的另一端与升降臂的一端驱动连接,所述升降臂的另一端与所述吸取机构驱动连接;所述吸取机构上设置有若干个用于吸附圆盘机器人的吸盘,所述吸盘采用的是抽吸式的真空吸盘。
12.本发明一个较佳实施例中,取物装置包括若干个多轴运动机器臂,若干个多轴运动机器臂与设置在驱动座上部的转向座驱动连接,所述转向座通过若干个多轴运动机器臂与升降臂的一端驱动连接,所述升降臂的另一端与吸取机构驱动连接;所述吸取机构上设置有若干个用于吸附圆盘机器人的吸盘,所述吸盘采用的是抽吸式的真空吸盘。
13.本发明一个较佳实施例中,驱动座的底部设置有内凹的收纳腔,所述收纳腔内的上部设置有转向座,所述转向座的下部驱动设置有横向伸缩机构,所述横向伸缩机构与升降臂的上端驱动连接,所述升降臂的下部驱动设置有所述吸取机构,所述吸取机构上设置有若干个吸盘;所述驱动座的底部还设置所述收纳机构,所述收纳机构包括若干个能相对所述驱动座下部的收纳腔横向位移的支撑板。
14.本发明一个较佳实施例中,收纳机构包括若干个能纵向升降的支撑板,所述支撑板上预留有收纳区。
15.本发明一个较佳实施例中,驱动座上还设置有能拆装的挡板组,且所述挡板组位于所述支撑板的外围;或/和,所述驱动座上还设置有挡板组,所述挡板组包括至少一对相对设置的挡板,所述挡板的一端枢转连接在所述驱动座的上,且所述驱动座上还设置有挡板限位块,所述挡板限位块上设置有能对所述挡板进行限位组合的卡块。
16.本发明一个较佳实施例中,一种对圆盘故障机器人进行调度搬运的方法,采用所述的能对圆盘故障机器人进行调度搬运的机器人进行调度搬运,调度搬运的方法包括以下步骤;a.首先驱动所述驱动座通过取物装置搬运至少一个功能完好的圆盘机器人;b.驱动所述驱动座行驶至圆盘故障机器人处;c.通过取物装置将完好的圆盘机器人取出,放置在地面上;
d.然后通过驱动座上设置的货叉将圆盘故障机器人上的货物搬运下来,并将货物转移至地面上或完好的圆盘机器人上;e.通过驱动座上设置的转向座以及取物装置,将吸取机构驱动至地面上的圆盘故障机器人上方,再通过取物装置向下推进吸取机构,通过吸取机构的吸盘吸住圆盘故障机器人;f.反向操作取物装置将圆盘故障机器人放入收纳区;实现圆盘机器人以及圆盘故障机器人的转移与调度。
17.根据上述实施例所揭露的能对圆盘故障机器人进行调度搬运的机器人,达到的有益效果是:公开了一种能对圆盘故障机器人进行调度搬运的机器人,能对圆盘故障机器人上的货物进行转移,实现便捷有效的搬运调度,更适用于转移多种不同工作状态下的圆盘故障机器人。
18.1、通过设置在驱动座上的货叉,能通过货叉对圆盘故障机器人上的货物进行转移。然后将圆盘故障机器人进行回收、转移。
19.2、通过取物装置与转向座的组合结构,提升了取放操作的灵活度和便捷度。
20.3、在驱动座上设置有收纳机构通过收纳机构实现圆盘机器人的装载,一方面便于将好的圆盘机器人运载至故障点,另一方面便于将圆盘故障机器人转移后收纳至收纳机构。
21.4、收纳机构采用能相对驱动底座位移的结构,提升了装载的便捷性和稳定性。
附图说明
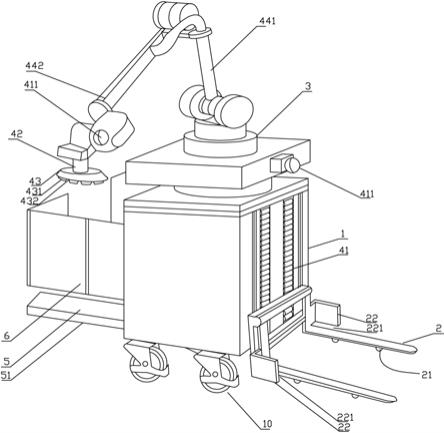
22.下面结合附图和实施例对本发明进一步说明;图1为根据本发明所揭露的能对圆盘故障机器人进行调度搬运的机器人的结构示意图一;图2为根据本发明所揭露的能对圆盘故障机器人进行调度搬运的机器人的结构示意图二;图3为根据本发明所揭露的能对圆盘故障机器人进行调度搬运的机器人的结构示意图三;图4为根据本发明所揭露的能对圆盘故障机器人进行调度搬运的机器人的结构示意图四;图5为根据本发明所揭露的能对圆盘故障机器人进行调度搬运的机器人的结构示意图五;图6为根据本发明所揭露的能对圆盘故障机器人进行调度搬运的机器人的结构示意图六;图中:1
‑
驱动座,10
‑
行走轮,11
‑
升降机构,12
‑
进出口,13
‑
收纳腔,131
‑
仓位一,132
‑
仓位二,2
‑
货叉,21
‑
辅助轮,211
‑
距离传感器一,22
‑
限位板,221
‑
限位槽,3
‑
转向座,4
‑
取物装置,41
‑
横向伸缩机构,411
‑
探头,42
‑
升降臂,43
‑
吸取机构,431
‑
吸盘,432
‑
距离传感器二,441
‑
第一驱动臂,442
‑
第二驱动臂,5
‑
收纳机构,51
‑
支撑板,6
‑
挡板组,7
‑
防撞垫。
具体实施方式
23.现在结合附图和实施例对本发明作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
24.实施例一如图1所示,一种能对圆盘故障机器人进行调度搬运的机器人,包括驱动座1,驱动座1的底部设置有若干个由驱动座1驱动行走的行走轮10,驱动座1上设置有升降机构11,升降机构11上驱动设置有能相对驱动座1纵向升降的货叉2;驱动座1上还设置有转向座3,转向座3上驱动设置有能相对驱动座1进行升降动作的取物装置4,取物装置4上设置有用于取物的吸取机构43;驱动座1上还设置有收纳机构5,且收纳机构5与货叉2不在驱动座1的同一侧;驱动座1上还设置有探头411或/和距离传感器。
25.升降机构11包括设置在驱动座1上设置有一对纵向设置的升降槽,升降槽内设置有升降驱动装置,升降驱动装置驱动活动安装在升降槽上的货叉2纵向位移。货叉2采用的是货叉2组件结构,货叉2组件结构包括一对叉脚,叉脚的下方设置有若干个辅助轮21。辅助轮21采用的是现有技术中的辅助滚轮的结构。货叉2与驱动座1的升降组合安装结构可以根据实际的动作需要以及工作状态的需求,采用现有技术中的驱动升降结构。在此不再一一详细赘述具体的驱动连接关系,详细的驱动连接组合可以参考现有技术中的叉车或现有技术中的l形叉车机器人上的驱动结构。
26.取物装置4包括横向伸缩机构41和升降臂42,横向伸缩机构41的一端与设置在驱动座1上部的转向座3驱动连接,横向伸缩机构41的另一端与升降臂42的一端驱动连接,升降臂42的另一端与吸取机构43驱动连接;吸取机构43上设置有若干个用于吸附圆盘机器人的吸盘431,吸盘431采用的是抽吸式的真空吸盘431。具体的,升降臂42的升降结构采用的是伸缩液压气缸驱动升降的伸缩杆结构。真空吸盘431通过真空泵与真空吸盘431驱动连接,实现真空吸盘431的抽吸和释放动作。
27.实施例二如图2所示,在实施例一的基础上,货叉2的一对叉脚分别设置在驱动座1的两侧。在驱动座1的两侧分别设置有升降槽,对应的升降槽内分别设置有升降驱动装置,通过升降驱动装置同步升降纵向滑动嵌设在所述升降槽内的货叉2的叉脚。驱动装置根据实际的安装需求和操作性能选用现有技术中的升降驱动装置。例如,采用驱动电机,驱动纵向设置的丝杆,通过丝杆转动带动旋接在叉脚上的旋接套。叉脚的两侧通过滑轨和对接滑槽的相对限位滑动嵌设的结构在纵向进行限位升降驱动。
28.实施例三如图3所示,在实施例一的基础上,货叉2组件的外侧设置有限位板22,限位板22与货叉2组件之间预留有用于限位对接的限位槽221。收纳机构5包括一对能纵向升降的支撑板51,支撑板51上预留有收纳区。驱动座1上还设置有能拆装的挡板组6,且挡板组6位于支撑板51的外围。但不仅限于此,支撑板51的安装结构可以根据实际的安装需求设置,在其他实施例中,挡板组6采用枢转连接在驱动座1上的安装组合结构。具体的,挡板组6包括至少一对相对设置的挡板,挡板的一端枢转连接在驱动座1的上,且驱动座1上还设置有挡板限位块,挡板限位块上设置有能对挡板进行限位组合的卡块。
29.实施例四
在实施例三的基础上,如图4所示,取物装置4采用多轴运动机器臂,多组多轴运动机器臂与设置在驱动座1上部的转向座3驱动连接,多组多轴运动机器臂包括相互枢转驱动连接的第一驱动臂441和第二驱动臂442。转向座3通过第一驱动臂441和第二驱动臂442与升降臂42的一端驱动连接,升降臂42的另一端与吸取机构43驱动连接;吸取机构43上设置有若干个用于吸附圆盘机器人的吸盘431,吸盘431采用的是抽吸式的真空吸盘431。
30.实施例五如图5、图6所示,驱动座1的底部设置有内凹的收纳腔13,收纳腔13的两侧设置有与收纳腔13横向连通的仓位一131和仓位二132,且仓位一131和仓位二132分别嵌设在驱动座1内。仓位一131和仓位二132分别用于收纳功能完好的圆盘机器人和圆盘故障机器人。收纳腔13内的上部设置有转向座3,转向座3的下部驱动设置有横向伸缩机构41,横向伸缩机构41与升降臂42的上端驱动连接,升降臂42的下部驱动设置有吸取机构43,吸取机构43上设置有若干个吸盘431;驱动座1的底部还设置收纳机构5,收纳机构5包括若干个能相对驱动座1下部的收纳腔13横向位移的支撑板51。
31.使用时,首先能通过驱动座1驱动至好的圆盘机器人的获取处,通过驱动座1驱底部行驶至好的圆盘机器人的上方,使得收纳腔13位于好的圆盘机器人的上部,通过收纳腔13内设置的吸取机构43,利用横向伸缩机构41与升降臂42驱动吸取机构43位移动作至圆盘机器人的上部,升降臂42驱动吸取机构43下降通过吸盘431吸住圆盘机器人,然后通过横向伸缩机构41与升降臂42的共同作用将圆盘机器人放置对应的仓位一131中,然后支撑板51位置挡住收纳腔13,驱动座1转移至圆盘故障机器人处,通过驱动座1上驱动设置的货叉2将圆盘故障机器人上的装载货物的托盘铲起,然后放置到一侧,再通过驱动座1行驶至圆盘故障机器人的上方,使得收纳腔13位于圆盘故障机器人的上部,通过收纳腔13内设置的吸取机构43,利用横向伸缩机构41与升降臂42驱动吸取机构43位移动作至圆盘故障机器人的上部,升降臂42驱动吸取机构43下降通过吸盘431吸住圆盘故障机器人,然后通过横向伸缩机构41与升降臂42的共同作用将圆盘机器人放置对应的仓位二132中;然后支撑板51位置挡住收纳腔13。驱动座1转移,实现对圆盘机器人的调度和转移。
32.实施例六一种对圆盘故障机器人进行调度搬运的方法,采用能对圆盘故障机器人进行调度搬运的机器人进行调度搬运,调度搬运的方法包括以下步骤;a.首先驱动所述驱动座1通过取物装置4搬运至少一个功能完好的圆盘机器人;b.驱动所述驱动座1行驶至圆盘故障机器人处;c.通过取物装置4将完好的圆盘机器人取出,放置在地面上;d.然后通过驱动座1上设置的货叉2将圆盘故障机器人上的货物搬运下来,并将货物转移至地面上或完好的圆盘机器人上;e.通过驱动座1上设置的转向座3以及取物装置4,将吸取机构43驱动至地面上的圆盘故障机器人上方,再通过取物装置4向下推进吸取机构43,通过吸取机构43的吸盘431吸住圆盘故障机器人;f.反向操作取物装置4将圆盘故障机器人放入收纳区;实现圆盘机器人以及圆盘故障机器人转移与调度。
33.工作原理:
首先驱动驱动座1通过取物装置4搬运至少一个功能完好的圆盘机器人;驱动所述驱动座1行驶至圆盘故障机器人处;通过取物装置4将完好的圆盘机器人取出,放置在地面上;然后通过驱动座1上设置的货叉2将圆盘故障机器人上的货物搬运下来,并将货物转移至地面上或完好的圆盘机器人上;通过驱动座1上设置的转向座3以及取物装置4,将吸取机构43驱动至地面上的圆盘故障机器人上方,再通过取物装置4向下推进吸取机构43,通过吸取机构43的吸盘431吸住圆盘故障机器人;反向操作取物装置4将圆盘故障机器人放入收纳区;实现圆盘机器人以及圆盘故障机器人转移与调度。
34.在实施例三中还能通过货叉2两侧设置的限位板22与货叉2组件之间预留的用于限位对接的限位槽221实现对货叉2获取的货物托盘进行对接获取,且还能通过设置的限位板22在外侧对托盘上的货物进行防护限位。
35.在实施例四中采用的是多轴运动机器臂驱动吸取机构43在多轴角度进行位移动作,进一步提升了取货和放货的灵活度。
36.在实施例五中采用的是在驱动座1下部设置的内置的收纳腔13,使用时,首先能通过驱动座1驱动至好的圆盘机器人的获取处,通过驱动座1驱底部行驶至好的圆盘机器人的上方,使得收纳腔13位于好的圆盘机器人的上部,通过收纳腔13内设置的吸取机构43,利用横向伸缩机构41与升降臂42驱动吸取机构43位移动作至圆盘机器人的上部,升降臂42驱动吸取机构43下降通过吸盘431吸住圆盘机器人,然后通过横向伸缩机构41与升降臂42的共同作用将圆盘机器人放置对应的仓位一131中,然后支撑板51位置挡住收纳腔13,驱动座1转移至圆盘故障机器人处,通过驱动座1上驱动设置的货叉2将圆盘故障机器人上的装载货物的托盘铲起,然后放置到一侧,再通过驱动座1行驶至圆盘故障机器人的上方,使得收纳腔13位于圆盘故障机器人的上部,通过收纳腔13内设置的吸取机构43,利用横向伸缩机构41与升降臂42驱动吸取机构43位移动作至圆盘故障机器人的上部,升降臂42驱动吸取机构43下降通过吸盘431吸住圆盘故障机器人,然后通过横向伸缩机构41与升降臂42的共同作用将圆盘机器人放置对应的仓位二132中;然后支撑板51位置挡住收纳腔13。驱动座1转移,实现对圆盘机器人的调度和转移。
37.以上依据本发明的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1