多出入口连续升降机的制作方法
1.本发明涉及升降机,尤其涉及多出入口连续升降机。
背景技术:
2.升降机广泛应用于物流以及各种工业生产中,其主要是实现对货物的搬运。
3.专利公开号为cn206359211u公开了一种连续升降机,包括机架本体,双驱动组件,链条传动组件,升降轨道组件,所述链条传动组件包括提升链条,回转轴组件,张紧链条结构组件,链条限位轨道组件;在所述提升链条上等距离固定设置有若干升降轨道组件,所述升降轨道组件固定在提升链条上,所述升降轨道组件与提升链条一体进行连续循环运动;所述双驱动组件通过驱动链条与链条传动组件连接,所述双驱动组件通过齿轮传动带动驱动链条运动,进而带动提升链条连续循环转动;在所述机架本体上端设有拉杆组件,通过拉杆组件带动升降轨道组件上的托辊组件将升降轨道组件上的物品拉出。该设备实现上下循环升降,提高升降节拍,但是货物运输只能单一出入口,存在着运输效率低的问题。
4.因此,鉴于上述问题提供有效提高运输效率的多出入口连续升降机。
技术实现要素:
5.为了克服现有技术货物运输只能单一出入口,存在着运输效率低的缺点,本发明的目的是:提供有效提高运输效率的多出入口连续升降机。
6.本发明的技术方案如下:多出入口连续升降机,包括有第一框体、通风网、支板、第一支架、滚筒、第一转动轮、第一旋转轮、第二转动轮、第一传输带、第二传输带、第二支架、链条、滚动柱、连接柱、驱动机构和推动机构,第一框体中部前后两侧均设有两个通风网,第一框体右侧中部设有两个支板,支板为上下设置,第一框体右侧下部和两个支板顶部均设有两组第一支架,每组第一支架均为两个,共有六组,每组的第一支架上部之间都均匀间隔转动式设有十个滚筒,第一框体上部内左侧转动式设有两个第一转动轮,两个第一转动轮为前后设置,第一框体下部内侧也转动式设有四个第一转动轮,第一框体下部内左侧转动式设有两个第一旋转轮,两个第一旋转轮为前后设置,第一框体上中部内右侧转动式设有两个第二转动轮,两个第二转动轮为前后设置,第二转动轮均与同侧的三个第一转动轮之间绕有第一传输带,前后两侧的三个第一转动轮之间均绕有第二传输带,第二传输带均绕过同侧的第一旋转轮,第一传输带右侧中部均上下对称设有第二支架,第二传输带右侧中部均上下对称设有连接柱,连接柱均与同侧的第二支架之间转动式连接有链条,上下两侧的两个链条之间均转动式设有多个滚动柱,第一框体上设有运输货物的驱动机构,支板上均设有将货物自动上料至滚动柱上的推动机构。
7.可选地,驱动机构包括有安装框、第一光电传感器、触碰开关、触碰块和第一驱动电机,第一框体后侧的左下侧设有安装框,第一框体内前壁中部设有两个第一光电传感器,两个第一光电传感器为上下设置,第一框体内后壁右侧中部设有两个触碰开关,两个触碰开关为上下设置,后侧的两个第二支架后侧均设有触碰块,安装框内侧设有第一驱动电机,
第一驱动电机输出轴与左后侧下部的第一转动轮连接。
8.可选地,推动机构包括有第一电动推杆、第一滑轨、第一滑块、挡块、第一摆动块、第一扭力弹簧、距离传感器和固定块,两个支板顶部右侧中部均设有第一电动推杆,两个支板顶部中间均设有第一滑轨,第一滑轨内侧均滑动式设有第一滑块,第一滑块与第一电动推杆伸缩杆连接,第一滑块上部右侧均设有挡块,第一滑块上部均转动式设有第一摆动块,第一摆动块均与同侧的第一滑块之间连接有两个第一扭力弹簧,第一滑轨顶部左侧均设有距离传感器,第一摆动块右侧下部均设有固定块,固定块与挡块接触。
9.可选地,还包括有避免货物从上侧的滚筒上滑落的拉动机构,拉动机构包括有减速电机、第二滑块、第二滑轨、第一绕线轮、第一拉绳、第三支架、第二绕线轮和第一弹簧,两个支板顶部中侧均设有减速电机,两个支板顶部左侧中部均设有两个第二滑轨,相近的两个第二滑轨之间均滑动式设有第二滑块,减速电机输出轴上均设有第一绕线轮,第一绕线轮均与同侧的第二滑块之间连接有第一拉绳,第一拉绳均绕在同侧的第一绕线轮上,前侧的两个第二滑轨上均设有第三支架,第三支架上部均转动式设有第二绕线轮,第一拉绳均绕过同侧的第二绕线轮,第二滑块均与同侧的两个第二滑轨之间连接有第一弹簧,第一弹簧的数量为四个,第一弹簧均位于同侧的第二滑轨内侧。
10.可选地,还包括有对运输过程中的货物进行稳定的稳固机构,稳固机构包括有压力传感器、第四支架、第二电动推杆、第三滑块、第二旋转轮、第三传输带、第二驱动电机、第二弹簧、第二光电传感器、固定套、吸盘和气泵,第一框体左后侧下部设有压力传感器,第一框体左侧中部设有两个第四支架,第四支架为前后设置,第四支架上均设有第二电动推杆,第一框体左侧滑动式设有两个第三滑块,第三滑块为前后设置,第三滑块均与同侧的第二电动推杆伸缩杆连接,第三滑块之间转动式设有两个第二旋转轮,两个第二旋转轮为上下设置,第二旋转轮之间绕有第三传输带,前侧的第三滑块下部前侧设有第二驱动电机,第二驱动电机输出轴与下侧的第二旋转轮前侧连接,第三滑块均与第一框体之间连接有两个第二弹簧,第一框体左下部后侧设有第二光电传感器,第三传输带上部右侧设有两个固定套,两个固定套为上下设置,固定套右侧均设有吸盘,固定套左前侧均设有气泵。
11.可选地,还包括有将高处运输下来的货物推至下侧的滚筒上进行出料的推料机构,推料机构包括有第二框体、双轴电机、第五支架、第三绕线轮、第二拉绳、第三滑轨、推块和第三弹簧,第一框体左下侧设有第二框体,第一框体左下侧中间设有双轴电机,第一框体左下侧中部设有两个第五支架,第五支架为前后设置,第五支架上均转动式设有第三绕线轮,第三绕线轮均与双轴电机两侧的输出轴连接,第一框体左下侧中部设有两个第三滑轨,第三滑轨均位于同侧的第五支架上方,第三滑轨均滑动式设有推块,推块均与第一框体滑动式连接,推块左下侧均与同侧的第三绕线轮之间连接有第二拉绳,第二拉绳均绕在第三绕线轮上,推块均与第一框体之间连接有第三弹簧。
12.可选地,还包括有对货物进行缓冲的挡料机构,挡料机构包括有第二摆动块、第六支架、第二扭力弹簧和固定杆,第一框体下部右侧设有第六支架,第六支架中部转动式设有第二摆动块,第二摆动块与第六支架之间连接有两个第二扭力弹簧,第二扭力弹簧为前后设置,第六支架上部左侧设有固定杆,固定杆与第二摆动块接触配合。
13.可选地,还包括有控制箱,第一框体后侧下部设有控制箱,控制箱内安装有开关电源、电源模块和控制模块,开关电源的输出端与电源模块通过电性连接,电源模块上通过线
路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;距离传感器、压力传感器、第二光电传感器、第一光电传感器和触碰开关都与控制模块通过电性连接;第一电动推杆、第二电动推杆、气泵、第一驱动电机和第二驱动电机都与控制模块通过继电器控制模块连接;减速电机和双轴电机都与控制模块通过直流电机正反转模块连接。
14.本发明的优点是:
15.1、第一传输带和第二传输带正转带动第二支架、链条、滚动柱、连接柱和触碰块向下移动,进而实现了将高处的货物进行向下运输的目的;
16.2、本发明通过第二滑块阻挡住滚筒上的货物,避免货物向左滑落;
17.3、第二电动推杆启动通过第三滑块带动吸盘向右移动与货物接触,待气泵启动进行抽气时,进而使得货物吸附在吸盘上,进而对货物进行限位,避免货物滑落下来;
18.4、当货物被向右推至下侧的滚筒上与第二摆动块接触时,进而带动第二摆动块正转,第二扭力弹簧形变起缓冲作用,避免货物由于被向右推动的力,从下侧的滚筒上直接向右滑下来,导致货物被损坏。
附图说明
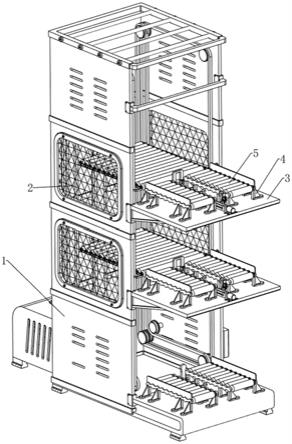
19.图1为本发明的第一种立体结构示意图。
20.图2为本发明的第一部分立体结构示意图。
21.图3为本发明的第二部分立体结构示意图。
22.图4为本发明的第三部分立体结构示意图。
23.图5为本发明的第二种立体结构示意图。
24.图6为本发明驱动机构的立体结构示意图。
25.图7为本发明驱动机构的第一部分立体结构示意图。
26.图8为本发明驱动机构的第二部分立体结构示意图。
27.图9为本发明推动机构的立体结构示意图。
28.图10为本发明推动机构的部分立体结构示意图。
29.图11为本发明拉动机构的立体结构示意图。
30.图12为本发明拉动机构的第一部分立体结构示意图。
31.图13为本发明拉动机构的第二部分立体结构示意图。
32.图14为本发明稳固机构的立体结构示意图。
33.图15为本发明稳固机构的部分立体结构示意图。
34.图16为本发明推料机构的立体结构示意图。
35.图17为本发明推料机构的第一部分立体结构示意图。
36.图18为本发明推料机构的第二部分立体结构示意图。
37.图19为本发明挡料机构的第一种立体结构示意图。
38.图20为本发明挡料机构的第二种立体结构示意图。
39.图21为本发明的电路框图。
40.图22为本发明的电路原理图。
41.附图标记说明:1_第一框体,2_通风网,3_支板,4_第一支架,5_滚筒,6_控制箱,7_
第一转动轮,8_第一旋转轮,9_第二转动轮,10_第一传输带,11_第二传输带,12_第二支架,13_链条,14_滚动柱,15_连接柱,16_驱动机构,161_安装框,162_第一光电传感器,163_触碰开关,164_触碰块,165_第一驱动电机,17_推动机构,171_第一电动推杆,172_第一滑轨,173_第一滑块,174_挡块,175_第一摆动块,176_第一扭力弹簧,177_距离传感器,178_固定块,18_拉动机构,181_减速电机,182_第二滑块,183_第二滑轨,184_第一绕线轮,185_第一拉绳,186_第三支架,187_第二绕线轮,188_第一弹簧,19_稳固机构,191_压力传感器,192_第四支架,1921_第二电动推杆,193_第三滑块,194_第二旋转轮,195_第三传输带,196_第二驱动电机,197_第二弹簧,198_第二光电传感器,199_固定套,1910_吸盘,1911_气泵,20_推料机构,201_第二框体,202_双轴电机,203_第五支架,204_第三绕线轮,205_第二拉绳,206_第三滑轨,207_推块,208_第三弹簧,21_挡料机构,211_第二摆动块,212_第六支架,213_第二扭力弹簧,214_固定杆。
具体实施方式
42.以下所述仅为本发明的较佳实施例,并不因此而限定本发明的保护范围。
43.实施例1
44.多出入口连续升降机,如图1
‑
5所示,包括有第一框体1、通风网2、支板3、第一支架4、滚筒5、第一转动轮7、第一旋转轮8、第二转动轮9、第一传输带10、第二传输带11、第二支架12、链条13、滚动柱14、连接柱15、驱动机构16和推动机构17,第一框体1中部前后两侧均设有两个通风网2,第一框体1右侧中部通过螺栓固接有两个支板3,支板3为上下设置,第一框体1右侧下部和两个支板3顶部均通过螺栓固接有两组第一支架4,每组第一支架4均为两个,共有六组,每组的第一支架4上部之间都均匀间隔转动式设有十个滚筒5,第一框体1上部内左侧通过轴承连接有两个第一转动轮7,两个第一转动轮7为前后设置,第一框体1下部内侧也通过轴承连接有四个第一转动轮7,第一框体1下部内左侧通过轴承连接有两个第一旋转轮8,两个第一旋转轮8为前后设置,第一框体1上中部内右侧通过轴承连接有两个第二转动轮9,两个第二转动轮9为前后设置,第二转动轮9均与同侧的三个第一转动轮7之间绕有第一传输带10,前后两侧的三个第一转动轮7之间均绕有第二传输带11,第二传输带11均绕过同侧的第一旋转轮8,第一传输带10右侧中部均上下对称设有第二支架12,第二传输带11右侧中部均上下对称设有连接柱15,连接柱15均与同侧的第二支架12之间转动式连接有链条13,上下两侧的两个链条13之间均转动式设有多个滚动柱14,第一框体1上设有驱动机构16,支板3上均设有推动机构17。
45.如图6、图7和图8所示,驱动机构16包括有安装框161、第一光电传感器162、触碰开关163、触碰块164和第一驱动电机165,第一框体1后侧的左下侧设有安装框161,第一框体1内前壁中部设有两个第一光电传两感器162,个第一光电传感器162为上下设置,第一框体1内后壁右侧中部设有两个触碰开关163,两个触碰开关163为上下设置,后侧的两个第二支架12后侧均设有触碰块164,安装框161内侧设有第一驱动电机165,第一驱动电机165输出轴与左后侧下部的第一转动轮7连接。
46.如图9和图10所示,推动机构17包括有第一电动推杆171、第一滑轨172、第一滑块173、挡块174、第一摆动块175、第一扭力弹簧176、距离传感器177和固定块178,两个支板3顶部右侧中部均通过螺栓固接有第一电动推杆171,两个支板3顶部中间均设有第一滑轨
172,第一滑轨172内侧均滑动式设有第一滑块173,第一滑块173与第一电动推杆171伸缩杆连接,第一滑块173上部右侧均通过螺栓固接有挡块174,第一滑块173上部均转动式设有第一摆动块175,第一摆动块175均与同侧的第一滑块173之间连接有两个第一扭力弹簧176,第一滑轨172顶部左侧均设有距离传感器177,第一摆动块175右侧下部均设有固定块178,固定块178与挡块174接触。
47.使用本设备时,首先按下电源总开关将本设备上电,将货物从右向左推至滚筒5上,货物与第一摆动块175接触,进而带动第一摆动块175和固定块178反转,第一扭力弹簧176形变,货物越过第一摆动块175后,在第一扭力弹簧176复位的作用下带动第一摆动块175和固定块178正转复位,同时距离传感器177检测到与货物之间的距离达到预设值,控制模块控制第一电动推杆171伸缩杆伸长三秒再收缩三秒后关闭,第一电动推杆171伸缩杆伸长带动第一滑块173向左移动,进而带动挡块174、第一摆动块175、第一扭力弹簧176和固定块178向左移动,当第一摆动块175与货物接触时,进而向左推动货物,将货物推至滚动柱14上后,第一电动推杆171伸缩杆收缩带动第一滑块173向右移动复位,进而带动挡块174、第一摆动块175、第一扭力弹簧176和固定块178向右移动复位,同时第一光电传感器162检测货物靠近光线变暗达到预设值,控制模块控制第一驱动电机165启动,第一驱动电机165输出轴带动左后侧下部的第一转动轮7正转,进而通过第一传输带10和第二传输带11带动第一旋转轮8、第二转动轮9和其余的第一转动轮7正转,同时第一传输带10和第二传输带11带动第二支架12、链条13、滚动柱14、连接柱15和触碰块164向下移动,进而将高处的货物向下运输,当滚动柱14向下移动与下侧的滚筒5同在一个水平面时,链条13顺着皮带的轨迹进行移动,使得链条13发生弯曲,滚动柱14将货物输送至下侧的滚筒5上,人们就可将货物从下侧的滚筒5上搬运下来,待第二支架12、链条13、滚动柱14、连接柱15和触碰块164运行到一个周期复位后,触碰块164与触碰开关163接触,控制模块控制第一驱动电机165关闭,不需要使用本设备时,按下电源总开关将本设备断电即可。
48.实施例2
49.在实施例1的基础之上,如图5、图11、图12和图13所示,还包括有拉动机构18,拉动机构18包括有减速电机181、第二滑块182、第二滑轨183、第一绕线轮184、第一拉绳185、第三支架186、第二绕线轮187和第一弹簧188,两个支板3顶部中侧均通过螺栓固接有减速电机181,两个支板3顶部左侧中部均通过螺栓固接有两个第二滑轨183,相近的两个第二滑轨183之间均滑动式设有第二滑块182,减速电机181输出轴上均设有第一绕线轮184,第一绕线轮184均与同侧的第二滑块182之间连接有第一拉绳185,第一拉绳185均绕在同侧的第一绕线轮184上,前侧的两个第二滑轨183上均设有第三支架186,第三支架186上部均转动式设有第二绕线轮187,第一拉绳185均绕过同侧的第二绕线轮187,第二滑块182均与同侧的两个第二滑轨183之间连接有第一弹簧188,第一弹簧188的数量为四个,第一弹簧188均位于同侧的第二滑轨183内侧。
50.当触碰块164运行到一个周期复位后与触碰开关163接触,控制模块控制减速电机181输出轴反转一圈后停止,减速电机181输出轴反转带动第一绕线轮184反转,进而通过第一拉绳185带动第二滑块182向下移动,第一弹簧188被压缩,使得第一摆动块175能够将货物推至滚动柱14上,第一光电传感器162检测货物靠近光线变暗达到预设值,控制模块控制减速电机181输出轴正转一圈后关闭,减速电机181输出轴正转带动第一绕线轮184正转,第
一拉绳185被放松,进而在第一弹簧188复位的作用下带动第二滑块182向上移动复位,进而阻挡住滚筒5上的货物,避免货物向左滑落,同时当第二滑块182向下移动靠近距离传感器177时,距离传感器177检测到与第二滑块182之间的距离达到预设值,控制模块控制第一电动推杆171伸缩杆伸长三秒再收缩三秒后关闭。
51.如图5、图14和图15所示,还包括有稳固机构19,稳固机构19包括有压力传感器191、第四支架192、第二电动推杆1921、第三滑块193、第二旋转轮194、第三传输带195、第二驱动电机196、第二弹簧197、第二光电传感器198、固定套199、吸盘1910和气泵1911,第一框体1左后侧下部设有压力传感器191,第一框体1左侧中部通过螺栓固接有两个第四支架192,第四支架192为前后设置,第四支架192上均设有第二电动推杆1921,第一框体1左侧滑动式设有两个第三滑块193,第三滑块193为前后设置,第三滑块193均与同侧的第二电动推杆1921伸缩杆连接,第三滑块193之间转动式设有两个第二旋转轮194,两个第二旋转轮194为上下设置,第二旋转轮194之间绕有第三传输带195,前侧的第三滑块193下部前侧通过螺栓固接有第二驱动电机196,第二驱动电机196输出轴与下侧的第二旋转轮194前侧连接,第三滑块193均与第一框体1之间连接有两个第二弹簧197,第一框体1左下部后侧设有第二光电传感器198,第三传输带195上部右侧设有两个固定套199,两个固定套199为上下设置,固定套199右侧均设有吸盘1910,固定套199左前侧均设有气泵1911,气泵1911与吸盘1910连接。
52.如图5、图16、图17和图18所示,还包括有推料机构20,推料机构20包括有第二框体201、双轴电机202、第五支架203、第三绕线轮204、第二拉绳205、第三滑轨206、推块207和第三弹簧208,第一框体1左下侧设有第二框体201,第一框体1左下侧中间通过螺栓固接有双轴电机202,第一框体1左下侧中部设有两个第五支架203,第五支架203为前后设置,第五支架203上均转动式设有第三绕线轮204,第三绕线轮204均与双轴电机202两侧的输出轴连接,第一框体1左下侧中部设有两个第三滑轨206,第三滑轨206均位于同侧的第五支架203上方,第三滑轨206均滑动式设有推块207,推块207均与第一框体1滑动式连接,推块207左下侧均与同侧的第三绕线轮204之间连接有第二拉绳205,第二拉绳205均绕在第三绕线轮204上,推块207均与第一框体1之间连接有第三弹簧208。
53.当距离传感器177检测到与第二滑块182之间的距离达到预设值,控制模块控制第二电动推杆1921伸缩杆伸长一秒后停止,第二电动推杆1921伸缩杆伸长带动第三滑块193向右移动,进而带动第三滑块193、第二旋转轮194、第三传输带195、第二驱动电机196、固定套199、吸盘1910和气泵1911向右移动,第二弹簧197被压缩,使得吸盘1910与货物接触,同时控制模块控制气泵1911启动,气泵1911抽气进而使得货物吸附在吸盘1910上,进而对货物进行限位,避免货物滑落下来,当第一光电传感器162检测到货物靠近光线变暗达到预设值时,控制模块控制第二驱动电机196输出轴正转八圈后关闭,第二驱动电机196输出轴正转带动下侧的第二旋转轮194正转,进而通过第三传输带195带动上侧的第二旋转轮194正转,第三传输带195带动固定套199、吸盘1910和气泵1911向下移动,使得气泵1911随着货物同时向下移动,当下侧的固定套199向下移动靠近第二光电传感器198时,第二光电传感器198检测到下侧的固定套199靠近光线变暗达到预设值时,控制模块控制下侧的气泵1911关闭,同时控制模块控制双轴电机202两侧的输出轴正转三圈再反转三圈后关闭,双轴电机202两侧的输出轴正转带动第三绕线轮204正转,进而通过第二拉绳205带动推块207向右移
动,第三弹簧208被压缩,进而将下侧的货物推至下侧的滚筒5上,正转三圈后,双轴电机202两侧的输出轴反转带动第三绕线轮204反转,第二拉绳205被放松,进而在第三弹簧208复位的作用下带动推块207向左移动复位,当上侧的固定套199向下移动靠近第二光电传感器198时,第二光电传感器198检测到上侧的固定套199靠近光线变暗达到预设值时,控制模块控制上侧的气泵1911关闭,同时控制模块控制双轴电机202两侧的输出轴正转三圈再反转三圈后关闭,双轴电机202两侧的输出轴正转带动第三绕线轮204正转,进而通过第二拉绳205带动推块207向右移动,第三弹簧208被压缩,进而将上侧的货物推至下侧的滚筒5上,推块207向右移动与压力传感器191接触,压力传感器191检测到压力达到预设值,控制模块控制第二电动推杆1921伸缩杆收缩一秒后关闭,第二电动推杆1921伸缩杆收缩带动第三滑块193向左移动,进而带动第三滑块193、第二旋转轮194、第三传输带195、第二驱动电机196、固定套199、吸盘1910和气泵1911向左移动,第二弹簧197随之复位,双轴电机202两侧的输出轴正转三圈后,双轴电机202两侧的输出轴反转带动第三绕线轮204反转,第二拉绳205被放松,进而在第三弹簧208复位的作用下带动推块207向左移动复位。
54.如图5、图19和图20所示,还包括有挡料机构21,挡料机构21包括有第二摆动块211、第六支架212、第二扭力弹簧213和固定杆214,第一框体1下部右侧设有第六支架212,第六支架212中部转动式设有第二摆动块211,第二摆动块211与第六支架212之间连接有两个第二扭力弹簧213,第二扭力弹簧213为前后设置,第六支架212上部左侧设有固定杆214,固定杆214与第二摆动块211接触配合。
55.当货物被向右推至下侧的滚筒5上时,货物与第二摆动块211接触,进而带动第二摆动块211正转,第二扭力弹簧213形变起缓冲作用,避免货物由于被向右推动的力,从下侧的滚筒5上直接向右滑下来,导致货物被损坏,当货物与第二摆动块211分离时,进而在第二扭力弹簧213复位的作用下带动第二摆动块211复位。
56.如图2、图21和图22所示,还包括有控制箱6,第一框体1后侧下部设有控制箱6,控制箱6内安装有开关电源、电源模块和控制模块,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;距离传感器177、压力传感器191、第二光电传感器198、第一光电传感器162和触碰开关163都与控制模块通过电性连接;第一电动推杆171、第二电动推杆1921、气泵1911、第一驱动电机165和第二驱动电机196都与控制模块通过继电器控制模块连接;减速电机181和双轴电机202都与控制模块通过直流电机正反转模块连接。
57.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1