一种集成下光源与透明皮带的精准定位装置的制作方法
1.本发明涉及产品的生产制造技术领域,特别是涉及一种集成下光源与透明皮带的精准定位装置。
背景技术:
2.在一些3c产品(3c产品,是计算机类、通信类和消费类电子产品三者的统称)的生产制造工序中,需要把电子屏幕产品放置到传送带上,然后通过传送带进行运送。当运送至传送带的尾端的时候,再通过机械机构对电子屏幕产品进行机械定位,在定位过程中,机械机构容易划伤电子屏幕产品,电子屏幕产品存在划伤磨损的风险,增量了产品的不良率。
技术实现要素:
3.本发明的目的是针对现有技术存在的技术缺陷,提供一种集成下光源与透明皮带的精准定位装置。
4.为此,本发明提供了一种集成下光源与透明皮带的精准定位装置,包括传送带安装座;
5.传送带安装座的顶部,安装有横向分布的传送带设备;
6.传送带设备上具有环绕分布且能够顺时针转动的传送带;
7.传送带的顶部,用于放置需要传送的产品;
8.其中,传送带的顶部右侧尾端正上方,安装有一个视觉定位相机;
9.视觉定位相机的镜头垂直向下,朝向所述传送带的顶部右侧尾端;
10.传送带设备,用于在其左端放置有电子屏幕产品后,根据外部输入的触发启动信号启动,将电子屏幕产品由左向右传送预设的距离,直到传送带右侧尾端的预设位置,停止运行;
11.该传送带右侧尾端的预设位置,位于视觉定位相机的正下方;
12.视觉定位相机,用于在传送带设备停止运行时,根据传送带设备发来的拍摄触发信号,实时拍摄采集所述传送带右侧尾端的预设位置上的产品图像,然后发送给工控机;
13.工控机,与视觉定位相机相连接,用于接收所述视觉定位相机发来的产品图像,并分析获取产品的位置信息,然后将产品的位置信息发送给取料机械手;
14.取料机械手,与工控机相连接,用于接收所述工控机发来的产品的位置信息,然后根据该产品的位置信息,对传送带上的产品进行取料操作;
15.传送带是透明的皮带。
16.优选地,传送带安装座的右边,具有一个面光源;
17.面光源,安装在一个可移动的、中空的光源底座的顶部。
18.优选地,视觉定位相机安装在一个相机支撑架的顶部,该相机支撑架位于传送带设备的右端后方;
19.该相机支撑架的形状为倒立的l形。
20.优选地,取料机械手,安装在一个机械手支撑底座上;
21.取料机械手的上部转臂底部的转动轴,与移栽吸附平台相连接;
22.移栽吸附平台的底部四角,分别安装有一个真空吸嘴。
23.由以上本发明提供的技术方案可见,与现有技术相比较,本发明提供了一种集成下光源与透明皮带的精准定位装置,其设计科学,可以通过传送带对电子屏幕产品进行传送,当传送至传送带尾端的时候,控制传送带停止运转,并通过视觉定位相机来采集产品的图像,然后通过进一步分析而获得产品的位置信息,然后将产品的位置信息发送给取料机械手,保证取料机械手对传送带上的产品进行精准取料,具有重大的实践意义。
附图说明
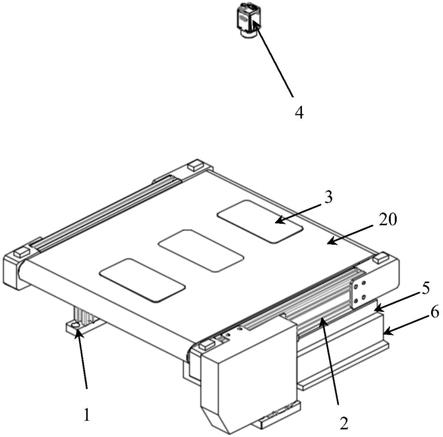
24.图1为本发明提供的一种集成下光源与透明皮带的精准定位装置,从前往后看的立体结构图;
25.图2为本发明提供的一种集成下光源与透明皮带的精准定位装置,从后往前看的立体结构图;
26.图3为本发明提供的一种集成下光源与透明皮带的精准定位装置,所配置的取料机械手和视觉定位相机的位置关系示意图。
具体实施方式
27.为使本发明实现的技术手段更容易理解,下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关申请,而非对该申请的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分。
28.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
29.需要说明的是,在本技术的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
30.此外,还需要说明的是,在本技术的描述中,除非另有明确的规定和限定,术语“安装”等应做广义理解,例如,可以是固定安装,也可以是可拆卸安装。
31.对于本领域技术人员而言,可根据具体情况理解上述术语在本技术中的具体含义。
32.参见图1至图3,本发明提供了一种集成下光源与透明皮带的精准定位装置,包括传送带安装座1;
33.传送带安装座1的顶部,安装有横向分布的传送带设备2;
34.传送带设备2上具有环绕分布且能够顺时针转动的传送带20;
35.传送带20的顶部,用于放置需要传送的产品3(例如电子屏幕产品);
36.其中,传送带20的顶部右侧尾端正上方,安装有一个视觉定位相机4;
37.视觉定位相机4的镜头垂直向下,朝向所述传送带20的顶部右侧尾端;
38.传送带设备2,用于在其左端放置有电子屏幕产品后,根据外部输入的触发启动信
号(例如用户通过设备开启按钮输入的启动指令)启动,将电子屏幕产品由左向右传送预设的距离,直到传送带20右侧尾端的预设位置,停止运行;
39.该传送带右侧尾端的预设位置,位于视觉定位相机4的正下方;
40.视觉定位相机4,用于在传送带设备2停止运行时,根据传送带设备2 (具体是传送带设备的控制器)发来的拍摄触发信号,实时拍摄采集所述传送带20右侧尾端的预设位置上的产品图像,然后发送给工控机;
41.工控机,与视觉定位相机4相连接(无线或者有线连接),用于接收所述视觉定位相机4发来的产品图像,并分析获取产品的位置信息,然后将产品的位置信息发送给取料机械手;
42.取料机械手7,位于传送带设备2的右边,与工控机相连接(无线或者有线连接),用于接收所述工控机发来的产品的位置信息,然后根据该产品的位置信息,对传送带20上的产品进行取料操作;
43.传送带20是透明的皮带。
44.需要说明的是,工控机,针对视觉定位相机4发来的电子屏幕产品图像,分析获取产品的位置信息时所采用的方法,所采用的产品定位技术,可以是现有的视觉定位技术(方法),为现有常规的公知技术,在此不再赘述。
45.在本发明中,具体实现上,取料机械手,可以为现有的四轴机械手,是现有的能够进行高速取放作业的机械手,为现有成熟的技术设备。例如,可以取料机械手中四轴机器人可以由那智不二越公司生产的型号为 ec06-5020-01的四轴机器人,作用是拾取移栽产品,当然还可以是其他根据坐标位置,可以拾取移栽产品的四轴机器人。
46.在本发明中,具体实现上,视觉定位相机4,为现有常规的视觉定位相机,例如可以采用巴斯勒公司生产的aca2500-14gm型号的工业相机,其作用是拍照获取产品的图像,然后上传图像信息给工控机。
47.在本发明中,具体实现上,传送带设备2为现有安装有传送带的设备,用于传送放置其上的产品。
48.在本发明中,具体实现上,传送带安装座1的右边,具有一个面光源5 (即平板光源,例如现有的led平板光源);
49.面光源5,安装在一个可移动的、中空的光源底座6的顶部。
50.需要说明的是,通过面光源5的设置,可以保证充分照亮传送带周边的环境,充分补光,从而确保视觉定位相机4对产品图像的拍摄质量。
51.需要说明的是,对于本发明,通过面光源打光,可以显示产品最大外形,视觉定位相机4在拍照后,由工控机识别产品的坐标位置,然后将位置信息反馈给取料机械手,取料机械手再根据该位置信息拾取产品。
52.需要说明的是,对于本发明,通过在传送带的尾部安置视觉定位相机,对上料的电子屏幕等产品进行无需挪动,在工控机的帮助下即可精准定位,然后通过取料机械手件精准取料,显著减少产品在传送带上料定位过程(被现有的机械机构定位)中的划伤破损,降低产品的磨损划伤概率,减少不良品产生,提升了产品的良品率。
53.在本发明中,具体实现上,视觉定位相机4安装在一个相机支撑架40 的顶部,该相机支撑架40位于传送带设备2的右端后方;
54.该相机支撑架40的形状为倒立的l形。
55.在本发明中,具体实现上,取料机械手7,安装在一个机械手支撑底座 70上;
56.取料机械手7的上部转臂底部的转动轴,与移栽吸附平台71相连接;
57.移栽吸附平台71的底部四角,分别安装有一个真空吸嘴72。
58.还需要说明的是,在本发明中,具体实现上,每个真空吸嘴,可以通过中空的连接管道,与外部的真空设备(例如真空气源,真空发生器等) 相连通,鉴于真空吸嘴的驱动控制结构为现有的技术结构,在此不再赘述。
59.为了更加清楚地理解本发明的技术方案,下面说明本发明的工作原理。
60.首先,人工将电子屏幕等产品放置在传送带的顶部左端;
61.然后,控制传送带设备启动,通过传送带来运输电子屏幕等产品,至传送带的顶部右侧尾端;
62.然后,传送带停止运转,上方的视觉定位相机对产品进行拍照;
63.然后,视觉定位相机将拍照数据传输至工控机;
64.然后,工控机在分析拍照数据后,获得产品的位置信息,然后再将产品的位置信息发给取料机械手;
65.最后,取料机械手根据产品的位置信息,进行精准的取料。
66.综上所述,与现有技术相比较,本发明提供的一种集成下光源与透明皮带的精准定位装置,其设计科学,可以通过传送带对电子屏幕产品进行传送,当传送至传送带尾端的时候,控制传送带停止运转,并通过视觉定位相机来采集产品的图像并分析获得产品的位置信息,然后将产品的位置信息发送给取料机械手,保证取料机械手对传送带上的产品进行精准取料,具有重大的实践意义。
67.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1