集成设备上料装备及上料方法与流程
1.本发明涉及集装箱技术领域,特别是集成设备上料装备及方法。
背景技术:
2.集装箱由于具有iso规定的尺寸,具有海、陆、空联运的优势,目前已被广泛应用于货物的运输,实现全球范围内的船舶、港口、航线、公路、中转站、桥梁、隧道等多式联运,在货物运输方面具有明显的优势。
3.随着集装箱运输的标准化和普及化程度越来越高,越来越多的设备也放置在集装箱内以形成集成设备,发运到目的地并与现场的设备进行连接后直接使用,以减少现场的工作量,如将电池装载到集装箱内以形成集成式电池模组,可以用于户外用于光伏组件的储能设备。在这种集成设备安装固定过程中一般需要将单个的电池包安装固定在集装箱内的设备安装架上,设备安装架上设置有若干用于安装电池包的电池包安装位。
4.在现有技术中一般通过叉车将电池等设备装配到集装箱内的设备安装架的安装位上如电池包安装位,在安装固定过程中需要设备与设备安装架上的安装位位置相对,然后将设备推入安装位。为了更充分的利用空间,设备安装架上的安装位的尺寸一般设置为略大于设备,这样就对装载过程中设备与安装位的入口的位置对接的精度提出了要求,否则容易造成设备在装载过程中碰撞到设备安装架造成设备的损坏。
技术实现要素:
5.本发明的目的是提供一种集成设备上料装备,以解决现有技术中的不足,它能够方便设备在集成设备上料装备上的放置,且避免设备在安装过程中由于设备的倾斜方向与设备安装位的倾斜方向的不匹配导致的设备损坏。
6.本发明提供的集成设备上料装备,包括:架体、沿竖向方向与所述架体滑动配合的装载机构和升降机构;所述装载机构包括滑动设置在所述架体相对两侧的一对支撑架;所述升降机构包括与一对所述支撑架一一对应的两个升降单元,所述升降单元驱动相应的支撑架沿竖向方向移动;
7.所述装载机构还具有设置在一对所述支撑架之间的承载架和设置在所述承载架上的抓取机构,所述承载架的两端分别与一对所述支撑架活动连接,所述抓取机构包括一对抓取支架和驱动一对所述抓取支架相向靠近的抓取驱动单元。
8.进一步的,所述承载架搭接在所述支撑架上或所述承载架与所述支撑架转动连接。
9.进一步的,所述抓取机构还具有设置在所述承载架上的横向支撑板和设置在所述抓取支架的底端并向内延伸的承载板,一对所述抓取支架滑动设置在所述横向支撑板上,一对所述抓取支架之间且位于所述承载板的上侧的空间形成装载空间。
10.进一步的,所述抓取驱动单元包括固定在所述横向支撑板上的一驱动件和与一对所述抓取支架配合的联动机构,所述驱动件与所述联动机构配合以驱动一对所述抓取支架
同步相向靠近或同步相背远离。
11.进一步的,所述联动机构包括转动安装在所述横向支撑板上的传动杆、设置在所述传动杆上并与所述传动杆同轴设置的传动齿轮和位于所述传动齿轮相对两侧并与所述传动齿轮啮合的一对齿条;一对所述齿条与一对抓取支架一一对应并连接固定;所述驱动件驱动所述传动杆转动。
12.进一步的,所述驱动件为设置在所述横向支撑板上背离所述抓取支架的一侧的气缸,所述联动机构还具有与所述气缸的气缸杆连接固定的驱动齿条,所述传动杆贯穿所述横向支撑板并具有与所述驱动齿条啮合的从动齿轮。
13.进一步的,所述横向支撑板上背离所述抓取支架的一侧设置有滑轨和滑动设置在所述滑轨上的滑块,所述驱动齿条固定在所述滑块上。
14.进一步的,所述驱动件上还设置有先导阀。
15.进一步的,所述横向支撑板沿前后方向滑动设置在所述承载架上,所述集成设备上料装备还具有驱动所述横向支撑板沿所述承载架滑动的前后驱动件。
16.进一步的,所述集成设备上料装备还具有推料机构,所述推料机构包括设置在所述横向支撑板上的推料支撑架、固定在所述推料支撑架上的推料驱动件和沿前后方向滑动设置在所述推料支架上的推动件,所述推料驱动件驱动所述推动件滑动,且所述推动件具有与所述装载空间位置相对的抵接部。
17.进一步的,所述承载板上设置有滚动件,若干所述滚动件沿前后方向排布设置在所述承载板上。
18.进一步的,所述集成设备上料装备还具有上料支撑架,所述上料支撑架具有上横梁、下横梁和连接上横梁和下横梁的纵梁;所述架体的上、下两侧分别滑动设置在上横梁、下横梁上;所述集成设备上料装备还具有设置在所述上料支撑架上并驱动所述架体移动的架体驱动机构。
19.进一步的,所述装载机构上还设置有数据采集单元,所述集成设备上料装备还具有控制单元,所述控制单元分别与所述数据采集单元和两个升降单元电性连接。
20.进一步的,所述升降单元包括伺服电机、与所述伺服电机配合的丝杆和与所述丝杆配合的丝杆螺母,所述支撑架固定在所述丝杆螺母上。
21.进一步的,所述升降单元还具有设置在所述伺服电机上的扭矩限位器。
22.进一步的,每一所述支撑架上设置有一对丝杆,一对丝杆设置在所述支撑架的两端,所述伺服电机通过一组齿轮转向器同步驱动一对所述丝杆。
23.本发明的另一实施例还公开了集成设备上料装备的上料方法,包括如下步骤:
24.通过抓取驱动单元控制两抓取机构相向靠近以将夹紧或托举住设备;
25.控制两个升降单元同步工作以将两个支撑架同时抬升第一高度h;
26.通过数据采集单元获取安装位两侧所对应的第一标准高度和第二标准高度;
27.根据第一标准高度调整承载架第一侧的支撑架位置,根据第二标准高度控制承载架第二侧的支撑架位置。
28.进一步的,在“通过数据采集单元获取安装位两侧所对应的第一标准高度和第二标准高度;”之前还包括:
29.控制固定数据采集单元的承载架向靠近安装位的方向移动,并将数据采集单元移
动至工作区域。
30.与现有技术相比,本发明实施例公开的集成设备上料装备中通过抓取机构抓取或抬升设备,方便了设备在集成设备上料装备上的放置,并且也方便的实现了设备的推料,同时,由于设置两个支撑架抬升分别通过各自独立的升降单元进行单独的控制,两个支撑架可以根据需要提升到不同的高度位置,两个支撑架可以处在不同的水平方向上,从而使设置在两个支撑架之间的承载架上的设备相比于水平面而言可产生一定角度的倾斜以适配相应的设备安装位,使设备在安装过程中与设备安装位相适配,方便了设备安装到设备安装位上,避免了设备的倾斜方向与设备安装位的倾斜方向的不匹配导致的设备损坏。
附图说明
31.图1是本发明实施例公开的集成设备上料装备在使用状态时的结构示意图;
32.图2是本发明实施例公开的集成设备上料装备在上料支撑架上的安装结构示意图;
33.图3是本发明实施例公开的集成设备上料装备的结构示意图
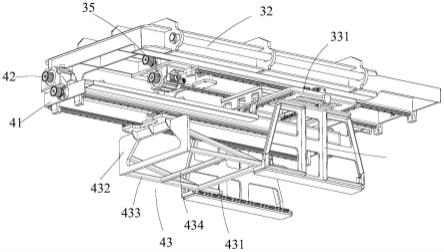
34.图4是本发明实施例公开的集成设备上料装备中推料机构的安装结构示意图;
35.图5是本发明实施例公开的集成设备上料装备中抓取驱动单元驱动抓取机构的结构示意图;
36.图6是本发明实施例公开的集成设备上料装备中抓取机构的结构示意图;
37.附图标记说明:1-架体,11-第一立柱,12-第二立柱,13-第三立柱,14
‑ꢀ
第四立柱,
38.2-装载机构,21-支撑架,
39.3-升降机构,31-升降单元,311-伺服电机,312-丝杆,313-齿轮转向器, 32-承载架,33-抓取机构,330-装载空间,331-横向支撑板,332-抓取支架, 3321-竖向连接板,3322-横向安装板,333-承载板,3331-滚动件,334-传动杆,335-传动齿轮,336-齿条,337-驱动齿条,338-从动齿轮,
40.34-抓取驱动单元,341-驱动件,
41.35-前后驱动件,
42.4-推料机构,41-推料支撑架,42-推料驱动件,43-推动件,431-抵接部, 432-竖向支撑板,433-推杆,434-连接杆,
43.5-上料支撑架,51-上横梁,52-下横梁,53-纵梁。
具体实施方式
44.下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
45.本发明的实施例:如图1-6所示,公开了一种集成设备上料装备,在集成设备领域中,用于将设备装载到集装箱内的安装架上以形成集成设备。如将电池包装载到集装箱内的安装架上以形成集成式储能设备。在实际使用过程中集装箱一般放置在集成设备上料装备的旁侧,为了实现高效的装载,如图1所示一般在集装箱箱体的两侧均设置有装置上料装置,通过两个集成设备上料装备同时装载设备。
46.集成设备一般包括集装箱体和设置在集装箱体内的设备,其中设备可以为通讯设
备或者是电力设备或者是网络设备,如电池包,将设备集成在集装箱体内从而形成集成设备以方便的实现设备的运转和使用。集装箱体内设置有箱内架体,在箱内架体上形成有若干安装位,安装位用于放置设备。所述架体包括若干沿水平方向延伸设置的横梁和若干沿竖向方向设置的纵梁,多个纵梁沿横向方向并列设置,所述横梁连接相邻的两纵梁。相邻两横梁和相邻两纵梁之间形成的空间为所述安装位。由若干所述横梁和若干所述纵梁交叉设置从而将所述箱体内的空间分割成若干在竖向方向上以及在横向方向间隔排列设置的安装位。
47.为了增加集装箱体内的设备的装载量,安装位形成的空间大小略大于设备,上述结构的设置使设备在装载到安装位之后,设备与箱内架体之间的间隙较小,虽然使相邻的两设备之间更紧密的排布,可以更好的利用箱体内的空间,但是设备与箱内架体之间的间隙小会对设备的装载造成影响。
48.此外,在设备进行装配的时候,用于放置箱体的地面常不平整,这也造成了安装位相比于水平面产生倾斜,也就是构成安装位的横梁相比于水平面倾斜设置。然而现有技术中用于装配设备的设备在将设备抬升后设备的底面一般沿水平方向延伸设置,在用推动单元将设备推动到相应的安装位的时候,由于构成安装位的横梁的斜向设置会与设备产生影响,阻挡推动单元对设备的推动,在影响设备装载的同时也容易造成设备的损坏。
49.如图2-3所示,在本实施例中集成设备上料装备包括:架体1和沿竖向方向与所述架体1滑动配合的装载机构2和升降机构3;所述装载机构2包括滑动设置在所述架体1相对两侧的一对支撑架21;所述升降机构3包括与一对所述支撑架21一一对应的两个升降单元31,所述升降单元31驱动相应的支撑架21沿竖向方向移动;
50.所述装载机构3还具有设置在一对所述支撑架21之间的承载架32和设置在所述承载架32上的抓取机构33,所述承载架32的两端分别与一对所述支撑架21活动连接,所述抓取机构33包括一对抓取支架332和驱动一对所述抓取支架332相向靠近的抓取驱动单元。
51.一对抓取支架332在抓取驱动单元34的作用下相向移动,相互靠拢,从而实现对位于两个抓取支架332之间的设备进行夹取或者托举,在对设备进行夹取或托举完成后,设备能够随抓取机构33的升降而移动。升降单元31同时控制两个支撑架21抬升,在抬升的过程中带动承载架32抬升,由于抓取机构 33设置在承载架32上,因此带动被两个抓取机构33夹取或托举的设备抬升,当设备抬升到相应的安装位的时候,通过推动机构将设备从抓取机构33推出使设备推动到安装位上。
52.由于设置两个支撑架21,并且两个支撑架21相对设置在架体1的两侧并分别通过各自的升降单元31抬升,使两个支撑架21可以根据需要提升到不同的高度位置,从而使设置在两个支撑架21之间的承载架32相对水平面产生倾斜,进而使托举或夹紧在两个抓取机构33之间的设备也产生相应的倾斜,以与所述安装位位置相对。方便了设备装载到安装位上,避免了设备的倾斜方向与安装位的倾斜方向不匹配时,设备在装载过程中的损坏。
53.现有技术中一般通过一个升降单元实现承载架的升降,或者虽然设置有两个升降单元,但是两个升降单元的目的是要控制设备在支撑到支撑架上后沿纵向方向上稳定的同步移动,也就是现有技术的方案中升降单元都是使支撑在承载架上的设备沿水平方向上下移动,这样显然不能满足实际的需要。
54.此外,在现有技术中设备一般放置在承载架32上,然后承载架32通过支撑架21实
现支撑。这样就需要专门的工具先将设备放置在承载架32上然后再通过升降机构3将设备抬升,这样结构的设置显然降低了设备的装载效率。本实施例创造性的设置了抓取机构33,通过抓取机构33对设备进行夹紧或托举,从而方便的实现了设备装载到承载架32上。
55.在本实施例中为了使承载架32随着两端的两个支撑架21不同步移动而相应的产生倾斜,需要承载架32可活动的与支撑架21连接。所述承载架32可以直接搭接在所述支撑架21上或所述承载架32与所述支撑架21转动连接。需要说明的是这里的搭接方式是承载架32直接放置在支撑架21上,也就是承载架32的下表面压在支撑架21的上表面。作为优选的方案,承载架32的两端与两侧各自相对应的支撑架21之间通过铰链转动连接。将承载架32设置成与支撑架21通过铰链转动连接在保证承载架32的稳定的前提下使承载架32 的倾斜角度更灵活。
56.如图2所示,在本实施例中所述架体1包括沿竖向方向延伸设置的四个立柱和连接在所述立柱之间的横梁,四个立柱呈矩形排列分别为第一立柱11、第二立柱12、第三立柱13和第四立柱14,第一立柱11、第二立柱12、第三立柱13和第四立柱14顺次排布,相邻两立柱之间通过横向连接柱连接固定。其中一个所述支撑架21的两端分别与第一立柱11、第二立柱12滑动配合,另一支撑架21的两端则分别与第三立柱12、第四立柱14滑动配合。
57.如图6所示,所述支撑架21包括支撑本体和设置在所述支撑本体相对两侧的滑块,所述滑块沿竖向方向滑动设置在所述架体1上。所述第一立柱11 上与第二立柱12相对的一侧设置有与第一滑块相适配滑轨,所述第二立柱12 上与所述第一立柱11相对的一侧也设置有与滑块相适配的滑轨。相应的,在第三立柱13和第四立柱14上也分别设置有滑轨。所述承载架32的通过铰链转动安装在所述支撑本体上,所述支撑本体具有板状结构或者柱状结构。
58.在承载架32搭接在支撑架21上的过程中所述本体包括横向横板和竖向支撑板,所述横向支撑板和竖向支撑板垂直设置以形成角钢结构。所述承载架 32搭接在横向支撑板上,横向支撑板的横向方向向另一支撑架21方向延伸。横向支撑板的设置使承载架32与支撑架21有更多的接触点,从而使承载架32相对支撑架21转动的过程中有更大的灵活性,可以实现多角度的倾斜。
59.在本实施例中所述抓取机构33还有设置在所述承载架32上的横向支撑板 331和设置在所述抓取支架332的底端并向内延伸的承载板333,一对所述抓取支架332滑动设置在所述横向支撑板331上;一对所述抓取支架332之间且位于所述承载板333的上侧的空间形成装载空间330。
60.当装载机构移动到设备的上方的时候,升降单元31控制承载架32向下移动,使一对抓取支架332的两个承载板333位于设备的下侧,并且一对承载板 333位于设备的相对两侧,然后通过抓取驱动单元控制两个抓取支架33相向移动,并在相向移动的过程中使两个承载板333相向靠拢,两个承载板333 相互靠拢移动到设备的下侧,并在随着承载架32向上移动的时候用于托举起设备,设备被抓取机构33抓取后定位到装载空间330内。
61.所述抓取驱动单元34包括固定在所述横向支撑板331上的一驱动件341 和与所述一对所述抓取支架332配合的联动机构,所述驱动件341与所述联动机构配合以驱动一对所述抓取支架332同步相向靠近或同步相背远离。
62.本实施例中通过一驱动件341实现两个抓取支架332的同步移动,从而方便的实现
了对抓取支架332的操控。当然在另一实施例中,所述驱动件341 还可以通过控制一个抓取支架332单向移动。
63.具体的,所述联动机构包括转动安装在所述横向支撑板331上的传动杆 334、设置在所述传动杆334上并与所述传动杆334同轴设置的传动齿轮335 和位于所述传动齿轮335相对两侧并与所述传动齿轮啮合的一对齿条336;一对所述齿条336与一对抓取支架332一一对应并连接固定;所述驱动件341 驱动所述传动杆334转动。
64.传动杆334在驱动件341的作用下转动在横向支撑板331上,并带动与传动杆334同轴设置的传动齿轮335转动,传动齿轮335在转动过程中的时候同时带动位于传动齿轮335两侧的齿条336移动,两个齿条336由于位于传动齿轮335的相对两侧,因此在传动齿轮335转动的时候带动的是两个齿条336 是向相反的方向移动的,而两个齿条336又分别连接至两个抓取支架332,因此带动两个齿条336的运动方向也是相反的,进而实现了通过一个驱动件341 带动一对抓取支架332相背远离彼此远离或者相向靠近向中间聚拢。
65.为了更好的实现齿条336的安装固定,所述抓取支架332包括竖向延伸设置的竖向连接板3321和垂直设置在所述竖向连接板3321顶部的横向安装板 3322,所述承载板333设置在所述竖向连接板3321的底端。
66.横向安装板3321自所述竖向安装板3321的前半部分或后半部分向外延伸设置成型,且所述竖向安装板3321在前后方向延伸的尺寸不超过竖向安装板 3321在前后方向上的尺寸的一半。两个抓取支架332的形状尺寸一致,在安装固定后两个竖向安装板3321相对设置,两个横向安装板3322相互互补。所述齿条336固定在横向安装板3322上并且两个齿条336的齿槽相对。
67.在本实施例中所述抓取支架332上设置有滑块,所述横向支撑板331上设置有与所述滑块滑动配合的滑轨,所述滑轨沿左右方向延伸设置,以使所述抓取支架332能够沿着左右方向滑动。在具体的实施例中,所述滑块设置在所述横向安装板3322上,并且所述滑块设置有两组,两组滑块沿前后方向排布。在本实施例中所述的前后方向是装载空间320的前后开口方向也就是设备被退出去的方向,即装载空间320与安装位相对的方向。左右方向垂直于前后方向,并与前后方向均位于水平方向上。
68.为了方便的实现对传动杆334的驱动,所述驱动件341为设置在所述横向支撑板331上背离所述抓取支架332的一侧的气缸,所述联动机构还具有与所述气缸的气缸杆连接固定的驱动齿条337,所述传动杆334贯穿所述横向支撑板331并具有与所述驱动齿条337啮合的从动齿轮338,其中,所述从动齿轮 338与传动杆334同轴设置。当然在另一实施例中所述驱动件341还可以为油缸或者行程电机。
69.在本实施例中所述传动杆334通过轴承转动安装在所述横向支撑板331 上,并且转动安装在横向支撑板331的中心位置,在横向支撑板331的中心设置有贯穿横向支撑板331的穿孔,轴承的外圈固定在穿孔的内壁上,轴承的内圈与传动杆334固定。
70.气缸的底座固定在横向支撑板331上背离抓取支架332的一侧,气缸的气缸杆在伸缩过程中带动驱动齿条337移动,驱动齿条337在移动过程中带动从动齿轮338的转动,进而带动传动杆334的转动,从而实现对齿条336的驱动。
71.将驱动件341设置在背离抓取支架332的一侧能够更好的实现驱动件341 的位置的排布,能够避免在抓取支架332移动过程中对抓取支架332的移动造成干涉。
72.进一步的,为了更好的实现驱动齿条337的平稳移动,所述横向支撑板 331上背离所述抓取支架332的一侧设置有滑轨和滑动设置在所述滑轨上的滑块,所述驱动齿条337固定在所述滑块上。
73.进一步的,所述驱动件341上还设置有先导阀,先导阀的设置能够避免在驱动件341出现故障的时候带动两个抓取支架332移动从而造成不必要的损害。
74.所述横向支撑板331沿前后方向滑动设置在所述承载架32上,所述集成设备上料装备还具有驱动所述横向支撑板331沿所述承载架32滑动的前后驱动件35。前后驱动件35能够驱动横向支撑板331在前后方向上移动,从而更方便的实现对设备的装载。当抓取支架332将货物托举后前后驱动件35驱动横向支撑板331向靠近安装位的方向移动,在与安装位进行位置对接调整后将设备推入到安装位。
75.可以理解的是,所述集成设备上料装备还具有推料机构4,所述推料机构 4可以直接设置在所述承载架32上,作为优选的方案,所述推料机构4设置在所述横向支撑板331上。
76.具体的,所述推料机构4包括设置在所述横向支撑板331上的推料支撑架 41、固定在所述推料支撑架41上的推料驱动件42和沿前后方向滑动设置在所述推料支架上的推动件43,所述推料驱动件42驱动所述推动件43滑动,且所述推动件43具有与所述装载空间330位置相对的抵接部431。
77.所述推动件43具有竖向支撑板432、垂直设置在所述竖向支撑板432并向抓取机构方向延伸设置的若干推杆433和连接所述推杆433的连接杆434,所述抵接部431设置在所述推杆433上远离所述支撑板432的一端。所述竖向支撑板432滑动设置在所述推料支撑架41上,所述推杆433设置在竖向支撑板432的底端。
78.在推料驱动件42的作用下所述推杆433向前移动并在移动的过程中被承载板333托举并位于装载空间330内的设备相抵接并对设备进行推动,从而装载到安装位内。
79.进一步的,为了方便的实现对设备的推动,所述承载板333上设置有滚动件3331,若干所述滚动件3331沿前后方向排布设置在所述承载板333上。滚动件3331为转动安装在所述承载板333上的辊轴,所述辊轴沿左右方向延伸设置,设备被推杆433推动的时候沿着滚动件3331向前移动。
80.所述集成设备上料装备还具有上料支撑架5,所述上料支撑架5具有上横梁51、下横梁52和连接上横梁51和下横梁52的纵梁53;所述架体1的上、下两侧分别滑动设置在上横梁51、下横梁52上;所述集成设备上料装备还具有设置在所述上料支撑架5上并驱动所述架体1移动的架体驱动机构。
81.架体驱动机构驱动所述架体1在上料支撑架5上左右移动,从而实现抓取装载机构2位置的调整,以将设备安装在不同位置的安装位上。
82.进一步的,所述装载机构2上还设置有数据采集单元,所述集成设备上料装备还具有控制单元,所述控制单元分别与所述数据采集单元、所述两个升降单元31电性连接。数据采集单元设置在装载机构2上并随着装载机构2的升降到第一预设位置,在第一预设位置后数据采集单元获取相应的安装位的图像,并将图像数据传递至控制单元,控制单元根据图像信息分析出安装位的底面的倾斜状态,并且根据安装位的倾斜状态控制两个升降单元31以使装载空间330上的设备与之相适配。在精细的调整过程中先控制一侧的支撑架21的升降单元31使与该侧位置相对的承载板333移动到相应位置后停止移动,然后控制另一支撑
架21移动到相应位置后完成设备的完整调整。
83.在上述实施例中第一预设位置为大致位置,在将装载机构2移动到第一预设位置的过程中可以控制两个升降单元31同步移动,此时装载在承载架32 上的设备在上升到第一预设位置的时候可以一直处在水平方向上。第一预设位置可以通过操作工肉眼判断,当然也可以通过控制单元进行控制。将承载架 32调整到第一预设位置后通过分别独立的调整两个升降单元31对装载空间 330再进行微调,使微调后的装载空间330上的设备与安装位的开口位置相对,设备的倾斜角度与安装位的倾斜角度相一致,从而方便实现设备装载到安装位。
84.述升降单元31包括伺服电机311、与所述伺服电机311配合的丝杆312 和与所述丝杆312配合的丝杆螺母,所述支撑架21固定在所述丝杆螺母上。通过伺服电机311控制丝杆312及丝杆螺母的配合实现支撑架21的升降调整,能够更精确的实现对支撑架21位置的调整。
85.作为优选的方案,所述升降单元31还具有设置在所述伺服电机311上的扭矩限位器,设置扭矩限位器能够有效的避免在伺服电机311出现问题的时候丝杆312产生转动,从而造成设备的掉落损坏。
86.每一所述支撑架21上设置有一对丝杆312,一对丝杆312设置在所述支撑架21的两端,所述伺服电机311通过一组齿轮转向器313同步驱动一对所述丝杆312。两个丝杆312同时控制一个支撑架21能够更平稳的实现支撑架 21升降的控制。
87.本发明的另一实施例还公开了集成设备上料装备的上料方法,包括如下步骤:
88.通过抓取驱动单元34控制两抓取机构33相向靠近以将夹紧或托举住设备;需要说明的是在控制抓取机构33相向靠近之前还需要控制升降机构3将抓取机构33下降至设备的底端的下侧;使抓取机构33上的承载板333位于设备的底端的下部,抓取机构33在相向靠近的时候承载板333移动到设备的下侧,以便于在抬升的时候承载板333将设备托举起来;
89.在抓取机构33到位后控制两个升降单元31同步工作以将两个支撑架21 同时抬升第一高度h;在这一步过程中,先将设备整体抬升至一定的高度,这里的第一高度h大致对应设备要装载到的安装位的位置和高度,在这个过程中可以通过人眼进行观察确定或者通过数据采集单元进行获取并通过升降机构3进行控制;
90.通过数据采集单元获取安装位两侧所对应的第一标准高度和第二标准高度;第一标准高度和第二标准高度为安装位底部两侧的高度值或者第一标准高度和第二标准高度为安装位顶部两侧的高度值或者是其他能标识安装位倾斜的两个参数;在具体的实施过程中数据采集单元可以先对安装位进行图像采集,然后根据图像采集的数据分析安装位的两侧的倾斜状况;
91.根据第一标准高度调整承载架32第一侧的支撑架位置,根据第二标准高度控制承载架32第二侧的支撑架位置。承载架32两侧的支撑架的高度的微调根据第一标准高度和第二标准高度确定,最终使设备的倾斜状况与安装位的倾斜状况是一致的;
92.进一步的,在“通过数据采集单元获取安装位两侧所对应的第一标准高度和第二标准高度;”之前还包括:
93.控制固定数据采集单元的承载架向靠近安装位的方向移动,并将数据采集单元移动至工作区域。
94.需要说明的是在本实施例中所述数据采集单元设置在承载架的横向支撑板上,先调整横向支撑板位置使横向支撑板向靠近安装位的方向移动,设置在横向支撑板上的数据采集单元也随着横向支撑板向靠近安装位的方向移动,当到达数据采集单元的工作区域后,数据采集单元激活启动;
95.最后通过推料机构将设备推入安装位,在这个过程中设备沿着承载板滑动进入到安装位。
96.以上依据图式所示的实施例详细说明了本发明的构造、特征及作用效果,以上所述仅为本发明的较佳实施例,但本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1