一种塔机远程驾驶遥控系统的制作方法
1.本公开涉及塔机控制技术领域,具体地,涉及一种塔机远程驾驶遥控系统。
背景技术:
2.塔机是建筑工作中关键的机械设备,在楼宇修建的场所塔机随处可见,可以有效的节省人力、降低建设成本和提高施工进度。但由于塔机驾驶室位置较高,无论是驾驶员上塔、下塔过程中,或是驾驶期间突发不适,都存在高空坠落、救援困难等风险,严重威胁驾驶员的生命安全,而一旦出现塔机倾覆事故,后果更加不堪设想。此外,由于装配式建筑建造过程中,对构件的吊装精度要求较高,驾驶员在高空中难以看清吊装区域具体情况,无法在吊装时对构件位置进行微调。因此,本领域的技术人员亟待研发一种新的技术方案解决上述问题。
技术实现要素:
3.为克服相关技术中存在的问题,本实用新型公开提供一种塔机远程驾驶遥控系统,所述系统包括:塔机、全景摄像机、吊钩摄像机、动态捕捉器、采集所述塔机周围环境影像的至少一个辅助摄像机、塔机安全监测传感器、vr遥控台和根据所述vr遥控台发送的信号控制所述塔机进行作业的控制器;
4.所述vr遥控台包括壳体、天线、翻折式太阳能板、vr显示设备和工作人员操作台;
5.所述天线、翻折式太阳能板、vr显示设备和工作人员操作台设置于所述壳体外部,所述天线与所述翻折式太阳能板连接,所述vr显示设备和工作人员操作台位于所述翻折式太阳能板下方;
6.所述全景摄像机、吊钩摄像机、塔机安全监测传感器和控制器设置于所述塔机上,所述动态捕捉器设置于所述塔机作业过程中被起吊的物体周围预设位置处;
7.所述全景摄像机、吊钩摄像机、动态捕捉器、辅助摄像机、塔机安全监测传感器和控制器分别与所述vr遥控台通信连接。
8.可选的,所述翻折式太阳能板包括:第一太阳能板、第二太阳能板、滑轨、滑块;
9.所述第一太阳能板和第二太阳能板通过铰链实现翻折式连接,所述滑块通过铰链与所述第一太阳能板连接;
10.所述滑轨与所述天线垂直且一侧固定连接于所述天线上,内部设置有使所述滑块沿滑轨前后移动的凹槽,以在所述滑块沿凹槽移动过程中实现所述第一太阳能板与第二太阳能板之间的翻折。
11.可选的,所述翻折式太阳能板还包括:第一固定端和第二固定端;
12.所述滑轨未与所述天线连接的一侧末端设置有第一固定端,与所述天线连接的一侧末端设置有第二固定端;
13.所述第一固定端上设置有锁止机构,所述锁止机构用于在所述第一太阳能板处于翻开状态时对所述第一太阳能板进行锁止;
14.所述第二固定端通过铰链与所述第二太阳能板固定连接。
15.可选的,所述塔机安全监测传感器包括以下至少一者:gnss传感器、倾角传感器、回转角度传感器、幅度传感器、起重量传感器、起重高度传感器、风速传感器和风向传感器。
16.可选的,所述全景摄像机设置于所述塔机的驾驶室上方;
17.所述吊钩摄像机设置于所述塔机的变幅小车下方。
18.可选的,所述vr遥控台还包括:验证工作人员身份的身份验证模块;
19.所述身份验证模块设置于所述壳体上,包括:安全锁、指纹识别单元或者人脸识别单元。
20.可选的,所述所述vr遥控还包括:供电单元;
21.所述供电单元设置于所述壳体内部,与所述翻折式太阳能板连接,以通过所述翻折式太阳能板向所述vr遥控台进行供电。
22.可选的,所述天线为竖直向上的杆件。
23.可选的,所述vr遥控台底部设置有万向轮。
24.可选的,所述vr显示设备为头戴式vr眼镜。
25.综上所述,通过本实用新型中的技术方案,可以达到以下有益效果:
26.(1)利用虚拟现实技术,使得工作人员可以同时监控高空驾驶室、吊钩、起吊区、吊放区和其它关键盲区等多个区域的影像信息以及塔机运行参数,且驾驶室视角为360度全景影像,根据这些信息,驾驶员能在地面身临其境地操作塔机,大大提高了远程遥控塔机的作业的安全性。
27.(2)工作人员可在吊放装配式建筑构件时,清晰地根据构件上钢筋套筒和钢筋的空间位置关系进行调整,并在不改变塔机原有机械档位的情况下,使调整时构件移动速度更慢,从而具有更高的操作精度,提高构件装配质量。
28.(3)移动式vr控制台的设计,在保证驾驶员拥有大视野、多视角的同时,可以自由移动,让驾驶员可以自由选择较为合适的场地操作塔机。
29.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
30.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
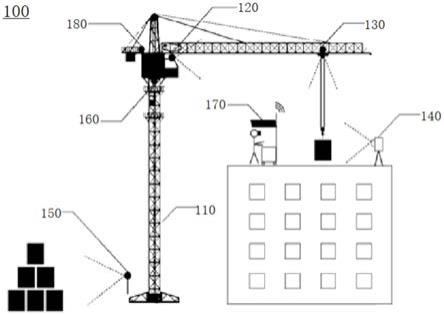
31.图1是根据一示例性实施例示出的一种塔机远程驾驶遥控系统的结构示意图;
32.图2是根据图1示出的一种vr遥控台的结构示意图;
33.图3是根据图2示出的一种翻折式太阳能板的结构示意图;
34.图4是根据图2示出的另一种翻折式太阳能板的结构示意图;
35.图5是根据图2示出的又一种翻折式太阳能板的结构示意图;
36.图6是根据图1示出的一种钢筋套筒和钢筋的结构关系示意图。
具体实施方式
37.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
38.图1是根据一示例性实施例示出的一种塔机远程驾驶遥控系统的结构示意图,如图1所示,该系统100包括:塔机110、全景摄像机120、吊钩摄像机130、动态捕捉器140、采集该塔机110周围环境影像的至少一个辅助摄像机150、塔机安全监测传感器160、vr遥控台170和根据该vr遥控台170发送的信号控制该塔机110进行作业的控制器180;该全景摄像机120、吊钩摄像机130、塔机安全监测传感器160和控制器180设置于该塔机110上,该动态捕捉器140设置于该塔机110作业过程中被起吊的物体周围预设位置处;该全景摄像机120、吊钩摄像机130、动态捕捉器140、辅助摄像机150、塔机安全监测传感器160和控制器180分别与该vr遥控台170通信连接。
39.示例地,虚拟现实技术(英文名称:virtual reality,缩写为vr)是一种通过计算机对真实环境进行模拟从而给用户带来沉浸式体验感的技术。本实用新型公开实施例中将虚拟现实技术引入到塔机110的远程遥控指挥中,通过全景摄像机120、吊钩摄像机130、动态捕捉器140和辅助摄像机150等图像采集设备全方位采集塔机110作业过程中各个方位的图像,并将图像上传至vr遥控台170,vr遥控台170采用虚拟现实技术对上述图像进行真实再现,使工作人员在vr遥控台170上根据上述图像对塔机110的作业发出准确的控制指令并通过安装于塔机110上的控制器180对塔机110进行控制。可见,工作人员(即驾驶员)可以直接在vr遥控台170内完成塔机110的操作控制,不需要再进入高空驾驶室内对塔机110进行操控,极大地保证了工作人员的人身安全,同时由于上述图像采集设备已经遍布了塔机110作业过程中的各个方位,使得工作人员能够清楚地在vr遥控台170上观察到塔机、被起吊物体、作业区域周围环境等图像信息,保证了工作人员在vr遥控台遥控操作的准确性。
40.其中,在上述图像采集设备中,全景摄像机120设置于塔机110的驾驶室上方,用于在塔机110作业过程中采集驾驶室视角的360
°
全息影像信息;吊钩摄像机130设置于塔机110的变幅小车下方,用于采集变幅小车下方吊钩周围影像,能够在吊钩起吊物体过程中全程跟踪拍摄,使吊钩和被起吊的物体始终位于影像画面中间;动态捕捉器140设置于塔机作业过程中被起吊的物体周围预设位置处,至少一个辅助摄像机150可以分别设置于塔机110的起吊区域、作业视角盲区、关键障碍物周围等可能会影响到塔机作业安全的区域。上述图像该采集设备将采集到的图像实时传输至vr遥控台。
41.另外,塔机安全监测传感器160设置于塔机110上,包括gnss传感器、倾角传感器、回转角度传感器、幅度传感器、起重量传感器、起重高度传感器、风速传感器和风向传感器中的至少一者,分别用于采集塔机地理位置、塔身倾角、回转角度、小车幅度、起重量、起重力矩、起重高度等运行参数后,由监控采集单元进行监控数据的采集,并无线实时传输至vr遥控台170,使工作人员在vr遥控台170上对塔机110进行遥控操作时,能够随时获取塔机110的地理位置、塔身倾角、回转角度、小车幅度、起重量、起重力矩、起重高度等数据信息,从而对塔机110所处的状态进行判断,辅助工作人员发出更加准确的操作指令。
42.示例地,为了保证vr遥控台170方便工作人员查看各种数据(例如,上述各种图像采集设备采集的图像,塔机安全监测传感器采集到的数据等)并对塔机进行遥控指挥,如图2所示是根据图1示出的一种vr遥控台的结构示意图。如图2所示,该vr遥控台170包括:壳体171、天线172、翻折式太阳能板173、vr显示设备174和工作人员操作台175;该天线172、翻折式太阳能板173、vr显示设备174和工作人员操作台175设置于该壳体171外部,该天线172与该翻折式太阳能板173连接,该vr显示设备174和工作人员操作台175位于该翻折式太阳能
板173下方。
43.其中,该vr显示设备174为头戴式vr眼镜,可为驾驶员提供驾驶室视角的360度全景影像,驾驶员视野内的影像可随其头部的旋转而旋转。同时,以浮窗形式显示安全监控数据(由塔机安全监测传感器160采集)、吊钩影像(由吊钩摄像机130采集)和其他角度的辅助影像信息(由至少一个辅助摄像机150采集),驾驶员通过操作单元,可对其视角内显示的影像信息进行缩放、移动等调整。
44.示例地,在vr遥控台170中,壳体171用于装载遥控台170的各种部件,例如供电单元、身份识别模块、vr显示单元、操作单元、数据处理单元和无线传输单元等,该壳体171外部设置有接口,并通过该接口与天线172和vr显示设备174连接。可以理解的是,该供电单元与翻折式太阳能板连接,用于储存该翻折式太阳能板产生的电能并通过翻折式太阳能板向所述vr遥控台进行供电;该身份识别模块包括:安全锁、指纹识别单元或者人脸识别单元,用于通过钥匙、指纹和人脸识别等方式核实驾驶员身份,驾驶员通过验证后方可获得操作权限;该操作单元用于采集驾驶员的操作信息,包括控制塔机、调整vr显示单元所显示的影像等;数据处理单元用于处理上述实施例中获取的影像信息、监控数据和控制数据,传输至vr显示单元进行显示,并负责处理驾驶员的操作信息,将其转化为塔机控制指令;该无线传输单元用于接收各类影像和监控信息,并向塔机无线控制模块发送塔机控制指令。
45.需要说明的是,该天线172为竖直向上的杆件,用于增加无线传输的功率。该天线172上固定有翻折式太阳能板173,该翻折式太阳能板173既可以为vr遥控台170提供电能,还可以为工作人员遮阳。另外,该vr遥控台170底部设置有万向轮,可实现vr遥控台170的自由移动。
46.如图3-图5所示,是翻折式太阳能板的结构示意图,该翻折式太阳能板173包括:第一太阳能板1731、第二太阳能板1732、滑轨1733、滑块1734;该第一太阳能板1731和第二太阳能板1732通过铰链1737实现翻折式连接,该滑块1734通过铰链1737与该第一太阳能板1731连接;该滑轨1733与该天线172垂直且一侧固定连接于该天线172上,内部设置有使该滑块1734沿滑轨1733前后移动的凹槽,以在该滑块1734沿凹槽移动过程中实现该第一太阳能板1731与第二太阳能板1732之间的翻折。第一固定端1735和第二固定端1736;该滑轨1733未与该天线172连接的一侧末端设置有第一固定端1735,与该天线172连接的一侧末端设置有第二固定端1736;该第一固定端1735上设置有锁止机构,该锁止机构用于在该第一太阳能板1731处于翻开状态时对该第一太阳能板1731进行锁止;该第二固定端1736通过铰链1737与该第二太阳能板1732固定连接。
47.示例地,通过上述塔机远程驾驶遥控系统对塔机110进行远程遥控的具体操作流程可以为:s1、安装部署:将全景摄像机120安装至塔机110高空驾驶室上方,采集驾驶室视野360度全景影像信息;将吊钩摄像机130安装至塔机110的变幅小车下方,采集吊钩周围的影像;根据实际需求,将辅助摄像机150安装至起吊、吊装及其它盲区,采集这些区域的影像;将控制器180与塔机110的电控系统连接,实现塔机110回转、变幅和起降的控制;将塔机安全监测传感器160布置于塔机110上,采集塔机110地理位置、塔身倾角、回转角度、小车幅度、起重量、起重力矩、起重高度等运行参数;s2、移动vr遥控台170:将vr遥控台170推动至适合作业的位置,将翻折式太阳能板173打开;s3、身份认证:驾驶员通过钥匙启动vr遥控台170的电源,并进行人脸/指纹识别,识别通过后vr遥控台170进入工作状态;
48.s4、调整视野:驾驶员戴起vr显示单元174,检查视野内显示的各个影像是否符合操作习惯,并通过vr遥控台170上的操作摇杆对视野进行调整。s5、起吊物体:驾驶员根据视野内的影像和运行参数,通过vr遥控台170上的操作摇杆控制塔机进行起重、变幅和回转等操作后起吊物体;s6、微调位置:当物体吊运到吊装区域附近时,驾驶员操作摇杆上的按钮,进入微调模式,使物体缓慢移动并吊放到位。
49.其中,微调模式,是由于在塔机110吊装装配式建筑构件时,驾驶员难以确定构件上的钢筋套筒和建筑上外露的钢筋是否对齐,为提高安装精度设置而的操作模式。如图6所示为一种钢筋套筒和钢筋的结构关系示意图,在塔机吊装装配式建筑构件时,工作人员(即驾驶员)难以确定构件上的钢筋套筒和建筑上外露的钢筋是否对齐,为提高安装精度设置一种微调模型。在该操作模式下,vr遥控台170上的vr显示单元将展示动态捕捉器140捕捉到的影像信息,vr遥控台170将构件的型号与数据库中的该构件模型数据进行比对,结合构件空间位置信息,确定构件的钢筋套筒在空间中的位置,同时将钢筋套筒、钢筋以增强现实的形式展示在vr显示单元的界面中,对于已对齐的套筒和钢筋,采用绿色显示,未对齐则采用红色显示。驾驶员根据vr画面中套筒和钢筋的位置关系进行微调,通过vr遥控台170通过输出间歇性的“开-关-开-关”控制信号,控制构件缓慢移动。
50.综上所述,本实用新型公开涉及一种塔机远程驾驶遥控系统,包括:塔机、全景摄像机、吊钩摄像机、动态捕捉器、至少一个辅助摄像机、塔机安全监测传感器、vr遥控台和根据该vr遥控台发送的信号控制该塔机进行作业的控制器;该vr遥控台包括壳体、天线、翻折式太阳能板、vr显示设备和工作人员操作台;该全景摄像机、吊钩摄像机、动态捕捉器、辅助摄像机、塔机安全监测传感器和控制器分别与该vr遥控台通信连接。通过在全景摄像机、吊钩摄像机等图像采集设备获取吊钩作业过程中各个方位的图像,工作人员通过vr遥控台查看上述图像并对塔机作业进行遥控指挥,消除了工作中人员高空作业时的危险,并通过图像采集设备和vr遥控台对塔机进行精准的遥控指挥与位置微调。
51.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
52.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
53.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1