火车货运车厢自动清理装置的制作方法
1.本实用新型涉及火车清理装置领域,尤其涉及一种火车货运车厢自动清理装置。
背景技术:
2.煤作为钢铁企业或者火力发电企业主要生产原料,主要运输方式是通过铁路运输。运煤火车进入厂区内由专业的翻车机系统进行卸煤作业。翻车机最大倾翻角度175
°
,在卸煤过程中会有部分余煤残留在火车车厢内。为减少损耗,各企业均设置清煤作业工序。现有清煤作业形式主要为人工清扫方式。将车厢内的残余煤粉铲出,并投入在运行的输送系统。清煤作业时间长,影响生产节奏的同时会产生较大扬尘,导致pm2.5、pm10、粉尘等指标不达标。且劳动强度较大,长期清扫作业对工人健康影响较大,存在诱发相关职业病的风险。
3.由于该项作业成本高、效率低,同时还带来环境污染,损害工人健康,亟待开发一套能配合翻车机作业的在线清煤系统。
技术实现要素:
4.针对上述现有技术中的不足,本实用新型提供一种火车货运车厢自动清理装置,适用于各领域散状物料货运车厢卸车后,粉料清理作业。
5.为了实现上述目的,本实用新型提供一种火车货运车厢自动清理装置,包括一水平移动平台以及安装于所述水平移动平台上的一多自由度机械手和一负压吸附与降尘排尘机构。
6.优选地,所述水平移动平台包括一平台、两驱动齿轮、两行走电机和一平面导轨;所述平台可沿所述平面导轨长度方向移动地架设于所述平面导轨上,所述行走电机固定于所述平台上并分别与两所述驱动齿轮传动连接,所述驱动齿轮设置于所述平台的两侧并分别与所述平面导轨两侧的外齿啮合。
7.优选地,所述多自由度机械手包括一机械手基座、一水平动力臂、一垂直动力臂和毛刷组件;所述机械手基座固定于所述平台上,所述机械手基座通过一基座旋转关节和一变幅机构连接所述水平动力臂,所述机械手基座与所述水平动力臂之间、所述水平动力臂与所述垂直动力臂顶端之间以及所述垂直动力臂底端与所述毛刷组件之间分别通过一动力臂摆动关节连接;所述毛刷组件与所述垂直动力臂之间还连接有一动力刷旋转关节;所述毛刷组件包括相连的一竖直毛刷和一水平毛刷。
8.优选地,所述基座旋转关节带有制动装置和编码器。
9.优选地,所述多自由度机械手通过多个伺服电机驱动。
10.优选地,所述负压吸附与降尘排尘机构包括固定于所述平台上的一管路、一风机电机、一风机、一储灰仓和一螺旋输送机;所述管路的一端延伸至所述毛刷组件旁,所述管路的另一端连接所述储灰仓;所述风机电机连接所述风机,所述风机安装于所述管路上;所述储灰仓的出料口安装有一闸板阀并连接所述螺旋输送机;所述储灰仓还安装有一仓壁振
动器和一料位开关;所述储灰仓内的上部还安装有一导流挡尘罩和一滤网。
11.优选地,还包括一空间位置检测及解算系统和一智能控制与安全保护系统。
12.优选地,所述空间位置检测及解算系统包括多个位置传感器、多个限位开关和一第一雷达;所述位置传感器安装于所述平台上;所述限位开关安装于所述平面导轨;所述第一雷达安装于所述垂直动力臂。
13.优选地,所述智能控制与安全保护系统包括一配电柜、一控制柜、一第二雷达、一控制终端、一遥控装置和一远程监控装置;所述配电柜、所述控制柜和所述第二雷达固定于所述平台上,所述控制终端和所述遥控装置与所述控制柜通信连接;所述控制终端包括按钮控制面板和触摸屏控制界面;所述远程监控装置包括摄像头。
14.优选地,所述水平移动平台带有限位与安全保护装置,采用变频调速,移动速度为0.5m/s;所述水平移动平台采用格雷母线编码电缆定位。
15.本实用新型由于采用了以上技术方案,使其具有以下有益效果:
16.1、通过多自由度机械手和负压吸附与降尘排尘机构的配合,可实现火车车厢内余料的自动回收,回收速度可与卸车速度匹配,保证卸车节奏;
17.2、可取消为清扫车厢余料而专门修建的清扫工位,减少建设成本;
18.3、车厢余料清扫作业方式由人工方式改为自动在线清扫方式,可节约人工成本提高劳动效率;
19.4、可避免清扫作业过程中产生的扬尘,改善现场环境;
20.5、具备自动识别车厢内余料分布,自动规划清扫作业方式,调整系统参数等功能,自动化、智能化程度高。
附图说明
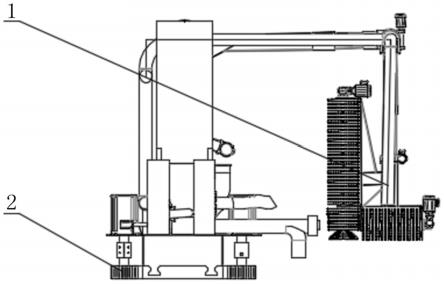
21.图1为本实用新型实施例的火车货运车厢自动清理装置的正视图;
22.图2为本实用新型实施例的火车货运车厢自动清理装置的俯视图;
23.图3为本实用新型实施例的火车货运车厢自动清理装置的侧视图。
具体实施方式
24.下面根据附图图1~图3,给出本实用新型的较佳实施例,并予以详细描述,使能更好地理解本实用新型的功能、特点。
25.请参阅图1~图3,本实用新型实施例的一种火车货运车厢自动清理装置,包括一水平移动平台以及安装于水平移动平台上的一多自由度机械手1和一负压吸附与降尘排尘机构。
26.水平移动平台包括一平台、两驱动齿轮2、两行走电机6和一平面导轨3;平台可沿平面导轨3长度方向移动地架设于平面导轨3上,行走电机6固定于平台上并分别与两驱动齿轮2传动连接,驱动齿轮2设置于平台的两侧并分别与平面导轨3两侧的外齿啮合。
27.多自由度机械手1包括一机械手基座4、一水平动力臂、一垂直动力臂和毛刷组件;机械手基座4固定于平台上,机械手基座4通过一基座旋转关节和一变幅机构连接水平动力臂,机械手基座4与水平动力臂之间、水平动力臂与垂直动力臂顶端之间以及垂直动力臂底端与毛刷组件之间分别通过一动力臂摆动关节连接;毛刷组件与垂直动力臂之间还连接有
一动力刷旋转关节;毛刷组件包括相连的一竖直毛刷和一水平毛刷。
28.基座旋转关节带有制动装置和编码器。
29.多自由度机械手1通过多个伺服电机驱动。
30.负压吸附与降尘排尘机构包括固定于平台上的一管路、一风机电机5、一风机7、一储灰仓9和一螺旋输送机8;管路的一端延伸至毛刷组件旁,管路的另一端连接储灰仓9;风机电机5连接风机7,风机7安装于管路上;储灰仓9的出料口安装有一闸板阀并连接螺旋输送机8;储灰仓9还安装有一仓壁振动器和一料位开关;储灰仓9内的上部还安装有一导流挡尘罩和一滤网;可根据余料情况调节风量和压力,提高系统适应性。
31.还包括一空间位置检测及解算系统和一智能控制与安全保护系统。
32.空间位置检测及解算系统包括多个位置传感器、多个限位开关和一第一雷达;位置传感器安装于平台上;限位开关安装于平面导轨3;第一雷达安装于垂直动力臂。
33.智能控制与安全保护系统包括一配电柜10、一控制柜11、一第二雷达、一控制终端、一遥控装置和一远程监控装置;配电柜10、控制柜11和第二雷达固定于平台上,控制终端和遥控装置与控制柜11通信连接;控制终端包括按钮控制面板和触摸屏控制界面;远程监控装置包括摄像头。控制终端设手动和自动操作模式。
34.水平移动平台带有限位与安全保护装置,采用变频调速,移动速度为0.5m/s;水平移动平台采用格雷母线编码电缆定位;
35.空间位置检测及解算系统用于实时监测多自由度机械手1在工作过程中机械手与各车厢面的距离,并控制基座旋转关节、动力臂摆动关节连接和动力刷旋转关节的位置和速度;检测精度为5mm,解算速度50ms;
36.智能控制与安全保护系统用于实现对水平移动平台、多自由度机械手1、负压吸附与降尘排尘机构和空间位置检测及解算系统的实时控制、参数检测、与上位机信息交互、与前后设备的连锁顺序控制、安全监测与保护;将关键参数传输至上位机,并根据上位机中指定的连锁控制逻辑,实现多机协同作业,提高系统作业效率和智能化程度。
37.本实用新型实施例的一种火车货运车厢自动清理装置,整套装置所有设备均布置在平台上,且可以随着驱动齿轮2的运动在平面导轨3上沿着导轨方向进行移动。待多自由度机械手1移动到清扫的起始位置时,通过空间位置检测与结算平台系统检测出多自由度机械手1距离车厢各表面的距离。并控制多自由度机械手1各关节协同作业,将多自由度机械手1从待机位深入车厢,进入工作位。清扫作业开始后,水平毛刷、竖直毛刷与负压吸附系统协同作业完成清扫工作。清扫工作完成后,系统进行清洁度判断,系统自动决定是否进行二次清扫或者清扫完成。完成上述动作后,多自由度机械手1回归待机位,车厢清扫作业完成。
38.以上结合附图实施例对本实用新型进行了详细说明,本领域中普通技术人员可根据上述说明对本实用新型做出种种变化例。因而,实施例中的某些细节不应构成对本实用新型的限定,本实用新型将以所附权利要求书界定的范围作为本实用新型的保护范围。
相关技术
网友询问留言
已有1条留言
-
 0访客 来自[中国] 2023年06月27日 09:25专业研究制造火车货厢智能清扫机器人, 作业区无需人工,一键清扫+环保无扬尘+不开厢门, 有兴趣请咨询 13308407388
0访客 来自[中国] 2023年06月27日 09:25专业研究制造火车货厢智能清扫机器人, 作业区无需人工,一键清扫+环保无扬尘+不开厢门, 有兴趣请咨询 13308407388
1