一种用于散袋叠放成垛柔性集装袋的自动套袋机的制作方法
1.本发明属于包装设备技术领域,具体涉及一种用于散袋叠放成垛柔性集装袋的自动套袋机。
背景技术:
2.柔性集装袋,是集装单元器具的一种,主要是用于大宗散状粉粒物料的运输,广泛应用于水泥、化肥、化工原料、矿石等各类物品的包装。
3.柔性集装袋的类型主要有两种,一种是单吊环包装袋,即集装袋袋口侧面袋体设有一个大吊环,每个袋子首尾相叠由专用打卷设备成卷运输,这种形式的集装袋在国外较常用;而国内常用的是另一种,在集装袋的四角分别有四个小吊环,制袋厂通过人工将若干袋子按特定叠法叠放成垛,由液压设备将成垛袋子压实运输,而对于有密封要求的物料包装,还需在常规的集装袋内部增加一个密封性更好的内膜袋,一般内膜袋口比外袋袋口长一部分。
4.目前,国内在用集装袋包装机均为半自动,即物料的灌装和称重实现自动,集装袋的拣取、开口、套袋和挂钩则需要人工完成。
5.因此,需要亟待开发一种用于散袋叠放成垛柔性集装袋的自动拣取套袋装置。
技术实现要素:
6.本发明的目的在于克服上述缺陷,提供一种用于散袋叠放成垛柔性集装袋的自动套袋机,袋库机构存放成垛集装袋;袋口识别机构识别集装袋袋口精确位置;送袋机构将抓取的集装袋由袋库机构精确移动至放袋开口平台处;取袋抓手抓取袋库机构存储的袋子和放置单个集装袋在放袋平台上;放袋开口平台用于将放置的集装袋袋口打开;套袋机构用于将开口的集装袋套在下料管上。本发明可完全替代人工操作实现成垛集装袋的自动分拣、自动开口、自动套袋等全自动工作。
7.为实现上述发明目的,本发明提供如下技术方案:
8.一种用于散袋叠放成垛柔性集装袋的自动套袋机,包括袋库机构,送袋机构,袋口识别机构,取袋抓手,放袋开口平台和套袋机构;
9.袋库机构用于存放成垛集装袋;
10.袋口识别机构设于袋库机构上方,用于识别成垛集装袋中位于顶部的集装袋袋口;
11.送袋机构位于袋库机构和放袋开口平台的上方,送袋机构下端连接取袋抓手;送袋机构带动取袋抓手移至袋库机构上方,取袋抓手抓取成垛集装袋中位于顶部的集装袋袋口;送袋机构带动取袋抓手移至放袋开口平台,取袋抓手将抓取的集装袋放于放袋开口平台;
12.放袋开口平台位于袋库机构前方,实现集装袋开口;
13.套袋机构用于撑开并夹紧开口的集装袋,并将集装袋袋口套于下料口。
14.进一步的,上述自动套袋机还包括用于安装送袋机构、袋口识别机构和套袋机构的机架;
15.机架包括前立柱组件,上框梁,后立柱组件和底框梁,其中前立柱组件与后立柱组件分别设于放袋开口平台的前方和袋库机构的后方,上框梁通过前立柱组件和后立柱组件支撑于袋库机构和放袋开口平台的上方;底框梁的前后两端分别连接前立柱组件和后立柱组件底部,用于对袋库机构和放袋开口平台进行限位;
16.上框梁包括两根相互平行的上梁,每根上梁沿前后方向设置。
17.进一步的,袋口识别机构包括视觉检测组件,转动架和转动驱动气缸;
18.转动架一端连接后立柱组件,另一端固定安装视觉检测组件,转动驱动气缸固定于后立柱组件上,转动驱动气缸驱动转动架在水平面进行转动,避免视觉检测组件与送袋机构碰撞;
19.视觉检测组件包括壳体,相机,图像采集卡和图像处理模块,其中相机和图像处理模块通过卡槽固定在图像采集卡上,图像采集卡固定在壳体上。
20.进一步的,送袋机构包括导轨,送袋车,取袋臂组件和车体驱动组件;
21.导轨为2根,2根导轨分别设于上框梁中两根上梁的内侧;
22.车体驱动组件驱动送袋车沿导轨移动;
23.送袋车包括2根第一滑轨、2个第一滑轨滑块、滑板驱动组件和送袋滑板组件;2根第一滑轨平行安装于2根导轨之间,第一滑轨沿水平方向且与导轨垂直;滑板驱动组件驱动送袋滑板组件沿第一滑轨移动;
24.送袋滑板组件包括送袋滑板和第一齿板;滑板驱动组件包括滑板伺服电机、滑板驱动主动轮、滑板驱动同步带和滑板驱动从动轮;
25.送袋滑板的上下两端分别通过两个第一滑轨滑块安装于第一滑轨上;滑板驱动主动轮和滑板驱动从动轮分别设于第一滑轨两端的上方,滑板驱动同步带连接滑板驱动主动轮和滑板驱动从动轮,第一齿板与送袋滑板的上端面配合,夹紧滑板驱动同步带实现送袋滑板组件与滑板驱动同步带固定连接,滑板伺服电机驱动滑板驱动主动轮转动,进而通过滑板驱动同步带带动送袋滑板组件沿第一滑轨移动;
26.取袋臂组件包括大臂板,小臂组件,取袋臂驱动传动机构和抓手驱动组件;大臂板与送袋滑板组件连接,取袋臂驱动传动机构用于实现大臂板相对于送袋滑板组件的上下运动,取袋抓手通过小臂组件安装于大臂板上,抓手驱动组件用于实现小臂组件相对于大臂板的上下运动。
27.进一步的,取袋臂驱动传动机构包括第二滑轨,第二滑轨滑块,第一传动齿条,取袋臂驱动伺服电机和第一传动齿轮;
28.大臂板沿上下方向设置,第二滑轨为两根,两根第二滑轨沿上下方向平行安装于大臂板第一面,第一传动齿条与第二滑轨平行,且位于两根第二滑轨之间,送袋滑板组件与第二滑轨滑块固定连接,第二滑轨滑块安装于第二滑轨上,第一传动齿轮与第一传动齿条啮合,取袋臂驱动伺服电机驱动第一传动齿轮转动,第一传动齿轮转动通过第一传动齿条带动大臂板相对于送袋滑板组件上下运动;
29.抓手驱动组件包括无杆气缸,第三滑轨,第三滑轨滑块和抓手转动驱动伺服电机;
30.第三滑轨沿上下方向平行安装于大臂板第二面,小臂组件通过第三滑轨滑块安装
于第三滑轨上,无杆气缸驱动小臂组件沿第三滑轨上下运动;小臂组件与取袋抓手固定连接,抓手转动驱动伺服电机用于驱动小臂组件转动,小臂组件转动带动取袋抓手转动。
31.进一步的,车体驱动组件包括车体驱动主动轮、车体驱动主轴、车体驱动轮、车体驱动从动轮、车体驱动同步带和车体驱动传动机构;
32.每根导轨末端和起始端的内侧分别设置车体驱动主动轮和车体驱动从动轮,车体驱动主动轮和车体驱动从动轮之间通过车体驱动同步带连接,车体驱动同步带与导轨平行,车体驱动同步带与送袋车固定连接;2根导轨末端内侧的2个车体驱动主动轮之间设有车体驱动主轴,车体驱动主轴两端利用轴承固定于上框梁的两根上梁的前端,车体驱动主轴上设有车体驱动轮;车体驱动传动机构驱动车体驱动轮转动,车体驱动轮转动通过车体驱动主轴带动车体驱动主动轮转动,车体驱动主动轮通过车体驱动同步带带动送袋车沿导轨移动;
33.车体驱动传动机构包括车体驱动伺服电机,减速机,减速机输出轮和驱动轮驱动同步带;
34.减速机与车体驱动伺服电机输出轴连接,减速机输出轮安装于减速机输出轴上,减速机输出轮与车体驱动轮之间通过驱动轮驱动同步带连接。
35.进一步的,车架包括侧板、车轮组、第一滑轨横梁,滑板驱动从动轮安装板,滑板伺服电机安装板,第二齿板和限位轮;
36.侧板和第一滑轨横梁均为2个,2个平行且上下分布的第一滑轨横梁安装于2个平行的侧板之间且第一滑轨横梁与侧板垂直,第一滑轨安装于第一滑轨横梁上;滑板驱动从动轮安装板和滑板伺服电机安装板分别设于2根第一滑轨横梁中位于上方的第一滑轨横梁的两端,滑板驱动从动轮安装板和滑板伺服电机安装板分别用于安装滑板驱动从动轮和滑板驱动主动轮;车轮组为2组,2组车轮组设于侧板外侧且分别与导轨的上表面和下表面配合,每组车轮组包含≥2个车轮;限位轮安装于侧板上,限位轮与导轨内侧面贴合,实现沿导轨方向的限位;侧板顶部向外延伸形成翼板,翼板的下端面与第二齿板配合夹紧车体驱动同步带,实现车体驱动同步带与送袋车的固定连接。
37.进一步的,取袋抓手包括腕部组件,取袋盘组件,取袋抓手手指,转动驱动气缸,取袋抓手手指驱动气缸,吸盘和吸盘驱动气缸;
38.取袋盘组件包括取袋盘;
39.腕部组件、取袋抓手手指一端、转动驱动气缸、取袋抓手手指驱动气缸和吸盘驱动气缸均安装于取袋盘上表面,吸盘安装于取袋盘下表面;
40.腕部组件连接于送袋机构下端,转动驱动气缸驱动取袋盘相对于腕部组件转动;吸盘吸住集装袋袋口,吸盘驱动气缸驱动吸盘上升至与取袋盘下表面齐平;取袋抓手手指驱动气缸驱动取袋抓手手指另一端向下转动,将集装袋袋脖压紧于取袋盘下表面。
41.进一步的,取袋抓手手指为两个,分别位于取袋盘两侧。
42.进一步的,取袋盘组件还包括固定于取袋盘上表面的固定座,腕部组件通过带座轴承安装于固定座上。
43.进一步的,取袋盘组件还包括支撑立板;
44.所述支撑立板下端固定于取袋盘的上表面,取袋抓手手指一端通过转轴与支撑立板上端连接。
45.进一步的,取袋盘设有开口,取袋抓手手指驱动气缸驱动取袋抓手手指另一端向下转动穿过所述开口,将集装袋袋口压紧于取袋盘下表面。
46.进一步的,取袋盘组件还包括固定于取袋盘上表面的气缸座;
47.转动驱动气缸尾部与腕部组件连接,转动驱动气缸的活塞杆经关节轴承与气缸座连接,转动驱动气缸的活塞伸缩带动取袋盘绕所述带座轴承转动。
48.进一步的,取袋抓手手指驱动气缸尾部与气缸座连接,取袋抓手手指驱动气缸的活塞杆经关节轴承与取袋抓手手指连接。
49.进一步的,取袋盘组件还包括固定于取袋盘上表面的吸盘驱动气缸固定座;
50.吸盘驱动气缸活塞杆与吸盘连接,吸盘驱动气缸尾部与吸盘驱动气缸固定座连接。
51.进一步的,气缸座为u形结构。
52.进一步的,吸盘为两个,分别设于取袋盘下表面两侧;
53.吸盘吸住集装袋内袋口,取袋抓手手指驱动气缸驱动取袋抓手手指另一端向下转动,将集装袋内袋和外袋的袋脖压紧于取袋盘下表面。
54.进一步的,放袋开口平台包括支撑框架组件,放袋平台,压袋脖机构,开口组件,上夹袋组件和下夹袋组件;
55.放袋平台固定于支撑框架组件上;以集装袋放于放袋开口平台时的袋口朝向为左向,压袋脖机构设于放袋平台的右部,压袋脖机构用于将集装袋袋脖部位压紧于放袋平台;
56.开口组件包括上吸盘腔、下吸盘腔和开口驱动传动机构,开口驱动传动机构固定于支撑框架组件上,上吸盘腔位于放袋平台上方,下吸盘腔设于放袋平台的左部,上吸盘腔和下吸盘腔分别吸住集装袋袋口的上表面和下表面,开口驱动传动机构驱动上吸盘腔进行相对于放袋平台的上下运动,实现集装袋袋口的开口;上夹袋组件固定于上吸盘腔上;下夹袋组件固定于下吸盘腔上;上夹袋组件和下夹袋组件用于在集装袋袋口开口后分别夹紧集装袋袋口的上表面和下表面;
57.开口组件中的开口驱动传动机构包括第四滑轨滑块,第四滑轨和开口气缸;
58.第四滑轨滑块和开口气缸固定于支撑框架组件上,第四滑轨为沿上下方向的直线滑轨,第四滑轨与第四滑轨滑块配合,第四滑轨与上吸盘腔固定连接,开口气缸的活塞杆带动上吸盘腔运动,上吸盘腔带动第四滑轨相对于第四滑轨滑块上下运动,实现上吸盘腔相对于放袋平台的上下运动;
59.压袋脖机构包含分别设于放袋平台右部两侧的两个机械手指和机械手指驱动气缸;
60.机械手指驱动气缸驱动两个机械手指分别压紧于集装袋袋脖部位两侧;
61.上夹袋组件包括上夹袋板和上夹袋气缸,上夹袋板一端固定于上吸盘腔上,上夹袋板另一端在上夹袋气缸的驱动下转动,将集装袋袋口的上表面压紧于上吸盘腔的下端面;
62.下夹袋组件包括下夹袋板和下夹袋气缸,下夹袋板一端固定于下吸盘腔上,下夹袋板另一端在下夹袋气缸的驱动下转动,将紧集装袋袋口的下表面压紧于吸盘腔上端面;
63.支撑框架组件包括平台框架和上横架;
64.上横架固定于平台框架上方,上横架包括平行于放袋平台的水平横梁和用于连接
平台框架和横梁的侧立柱,放袋平台固定于平台框架上,开口组件的开口驱动传动机构固定于上横架的横梁上。
65.进一步的,套袋机构包括支撑架,套袋滑板组件,撑袋组件,撑袋组件驱动气缸,电机和第二传动齿轮;
66.套袋滑板组件包括套袋滑板,第五滑轨,第二传动齿条和第五滑轨滑块;撑袋组件包括撑袋转架,撑袋手驱动气缸,撑袋手,夹指驱动气缸和夹指;
67.撑袋转架垂直安装于套袋滑板第二面,撑袋手为2个,每个撑袋手包括手臂和设于手臂第一端的手掌,2个撑袋手手臂的第二端安装于撑袋转架上,2个撑袋手的手掌相对设置;
68.撑袋组件驱动气缸用于驱动撑袋转架进行绕垂直于套袋滑板方向的转动,进而使撑袋手的手臂在撑开集装袋时为竖直向下,在将集装袋袋口套于下料口时为水平方向;2个撑袋手的手掌插入开口的集装袋后,撑袋手驱动气缸驱动2个撑袋手的手掌沿垂直于套袋滑板的方向远离,撑开集装袋;夹指安装于撑袋手的手掌外侧,夹指驱动气缸驱动夹指转动将集装袋袋口压紧于撑袋手的手掌上;
69.电机固定安装于前立柱组件上部,套袋滑板第一面设有2个平行的第五滑轨,第二传动齿条设于2个第五滑轨之间,支撑架通过第五滑轨滑块安装于第五滑轨上,电机与支撑架固定连接;电机的输出轴连接第二传动齿轮,第二传动齿轮与第二传动齿条啮合,电机通过第二传动齿轮和第二传动齿条的传动带动套袋滑板沿第五滑轨方向移动,带动撑袋手在放袋开口平台和下料口之间往复运动,撑袋手到达下料口后将集装袋袋口套于下料口;第五滑轨平行于放袋开口平台至下料口的连线在水平方向的分量。
70.本发明与现有技术相比具有如下有益效果:
71.(1)本发明根据集装袋的套袋过程设计了具有全面功能的自动套袋机,可以完全替代人工实现集装袋的自动分拣、自动开口和自动套袋工作,且该套袋机设计合理,结构简单,工作可靠;
72.(2)本发明设计了袋口识别机构,可以精确识别集装袋袋口准确位置,解决了由于人工叠放散袋成垛后袋口位置的不确定性问题,提高了抓取集装袋的成功率;
73.(3)本发明在放袋开口平台中,设计了防止袋子滑落的压袋脖机构及用于开口的上下相对设置的两吸盘腔,同时,为了防止吸盘腔吸力不足导致袋口闭合,还增加了夹袋组件,有效提高了集装袋开口的可靠性,可完全替代人工操作实现集装袋的袋口自动打开工作;
74.(4)本发明通过送袋机构,实现了集装袋在送袋过程中多个维度的灵活调整,精确度高,提高了集装袋送袋的自动化程度,有效减少了人力成本,提高了送袋效率。
附图说明
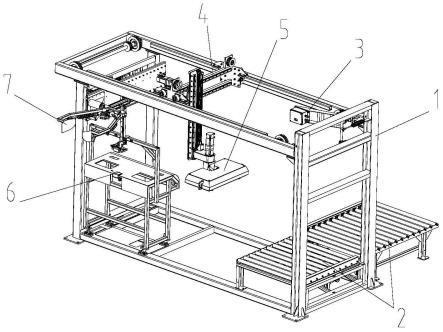
75.图1为本发明实施例1中一种用于散袋叠放成垛柔性集装袋的自动套袋机的总体结构示意图;
76.图2为本发明实施例1中机架的结构示意图;
77.图3是本发明实施例1中袋口识别机构的结构示意图;
78.图4是本发明实施例1中送袋机构的结构示意图;
79.图5是本发明实施例1中送袋机构的传动示意图;
80.图6是本发明实施例1中送袋车的结构示意图;
81.图7是本发明实施例1中车架的结构示意图;
82.图8是本发明实施例1中取袋臂组件的结构示意图;其中(a)和(b)分别为取袋臂组件不同方向的示意图;
83.图9是本发明实施例1中取袋抓手的结构示意图;
84.图10是本发明实施例1中取袋盘的结构示意图;
85.图11是本发明实施例1中放袋开口平台的结构示意图;
86.图12是本发明实施例1中压袋脖机构和下夹袋组件的结构示意图;
87.图13是本发明实施例1中套袋机构的结构示意图;
88.图14是本发明实施例1中套袋滑板组件的结构示意图;
89.图15是本发明实施例1中套袋机构齿轮齿条传动示意图;
90.附图中标记为:
91.1-机架,2-袋库机构,3-袋口识别机构,4-送袋机构,5-取袋抓手,6-放袋开口平台,7-套袋机构;
92.11-前立柱组件,12-上框梁,13-后立柱组件,14-底框梁;
93.31-视觉检测组件,32-转动架,33-转动驱动气缸;
94.41-导轨,42-送袋车,43-取袋臂组件,44-车体驱动组件;
95.421-车架,422-第一滑轨,423-第一滑轨滑块,424-送袋滑板组件,425-滑板驱动组件;
96.4211-侧板,4212-第一滑轨横梁,4213-滑板驱动从动轮安装板,4214-滑板伺服电机安装板,4215-第二齿板固定板,4216-车轮组,4217-限位轮,4218-第二齿板;
97.4241-送袋滑板,4243-第一齿板;
98.4251-滑板伺服电机,4252-滑板驱动主动轮,4253-滑板驱动同步带,4254-滑板驱动从动轮;
99.431-大臂板,432-第二滑轨,433-第二滑轨滑块,434-第一传动齿条,435-无杆气缸,436-第三滑轨,437-第三滑轨滑块,438-小臂组件,439-抓手转动驱动伺服电机,4310-取袋臂驱动伺服电机,4311-传动齿轮;
100.441-车体驱动主动轮,442-车体驱动主轴,443-车体驱动轮,444-车体驱动从动轮,445-车体驱动同步带,446-车体驱动伺服电机;447-减速机,448-减速机输出轮,449-驱动轮驱动同步带;
101.51-腕部组件,52-取袋盘组件,53-取袋抓手手指,54-转动驱动气缸,55-取袋抓手手指驱动气缸,56-吸盘,57-吸盘驱动气缸;
102.521-取袋盘,522-固定座,523-支撑立板,524-u形气缸座,525-吸盘驱动气缸固定座;
103.61-平台框架;62-放袋平台;63-上横架;64-开口组件;65-上夹袋组件;66-压袋脖机构;67-下夹袋组件;
104.641-上吸盘腔;642-第四滑轨滑块;643-第四滑轨;644-开口气缸;645-下吸盘腔;
105.661-机械手指;662-机械手指驱动气缸;
106.651-上夹袋板;652-上夹袋气缸;671-下夹袋板;672-下夹袋气缸;
107.71-支撑架,72-滑板组件,73-撑袋组件,74-撑袋组件驱动气缸,75-电机,76-第二传动齿轮;
108.721-套袋滑板,722-第五滑轨,723-第二传动齿条,724-第五滑轨滑块;
109.731-撑袋转架,732撑袋手驱动气缸,733-撑袋手,734-夹指驱动气缸,735-夹指。
具体实施方式
110.下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
111.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
112.本发明自动套袋机的袋库机构用于存放成垛集装袋,为取袋抓手提供袋子;袋口识别机构用于识别集装袋袋口精确位置;送袋机构用于将抓取的集装袋由袋库机构精确移动至放袋开口平台处;取袋抓手用于抓取袋库机构存储的袋子和放置单个集装袋在放袋平台上;放袋开口平台用于将放置的集装袋袋口打开;套袋机构用于将开口的集装袋套在下料管上。
113.本发明自动套袋机在工作时,先由袋口识别机构识别出集装袋袋口的精确位置,根据袋口位置信息,送袋机构将取袋抓手送至集装袋袋口处抓取集装袋,然后再由送袋机构将抓取的集装袋送至放袋平台上,取袋抓手将集装袋放置在放袋平台上,放袋开口平台固定住集装袋,并将集装袋袋口打开,套袋机构的撑袋手夹住集装袋袋口左右两侧,将集装袋移动至下料口,完成套袋工作。
114.实施例1:
115.本实施例结合附图1-15对自动套袋机进一步说明:
116.如图1所示,一种用于散袋叠放柔性集装袋的自动套袋机,包括机架1、袋库机构2、袋口识别机构3、送袋机构4、取袋抓手5、放袋开口平台6和套袋机构7。
117.如图2所示,机架1,包括前立柱组件11、上框梁12、后立柱组件13和底框梁14,其中前立柱组件11与后立柱组件13相对设置,上框梁12设置在前立柱组件11和后立柱组件13的顶部,底框梁14两端分别连接前立柱组件11和后立柱组件13底部。
118.袋库机构2位于底框梁14上方,靠近后立柱13一侧,用于存放成垛集装袋,并为取袋抓手4提供袋子;袋库机构2可以是输送机(不限于皮带输送机,或是链板输送机,又或是辊筒输送机等形式),也可以是固定在底框梁14上方的平台;本发明的优选方案是采用辊筒输送机将含托盘的成垛集装袋输送至取袋位置,并可以将空托盘输出,可实现取袋的连续工作。
119.袋口识别机构3位于后立柱组件13的上部,用于识别集装袋袋口精确位置;如图3所示,本发明的优选方案为,袋口识别机构3包括视觉检测组件31、转动架32和转动驱动气缸33,其中转动架32与后立柱组件13上部连接,视觉检测组件31通过紧固件固定在转动架32上,转动驱动气缸33尾部与后立柱组件13连接,转动驱动气缸33活塞杆端部与转动架32的曲柄通过紧固件连接;视觉检测组件31,包括壳体、相机、图像采集卡和图像处理模块,其
中相机和图像处理模块通过卡槽固定在图像采集卡上,图像采集卡通过紧固件固定在壳体上;视觉检测组件31不工作时,可通过转动驱动气缸33驱动转动架32带动视觉检测组件31转动至后立柱组件13内部,可防止取袋抓手4与视觉检测组件31发生碰撞;本方案的替代方案是袋口识别机构3,包括视觉检测组件31和固定架,其中固定架32固定在后立柱组件13上部,视觉检测组件31固定在固定架32上;本方案的另一替代方案是袋口识别机构3仅包括视觉检测组件31,视觉检测组件31固定在后立柱组件13上部。
120.送袋机构4位于上框梁12的内侧,用于将抓取的集装袋由袋库机构2移动至放袋开口平台6处;如图4所示,送袋机构4,包括相对设置在上框梁12内侧的两根导轨41、送袋车42、取袋臂组件43和车体驱动组件44;
121.如图6、7所示,送袋车42包括车架421、两根第一滑轨422、两个第一滑轨滑块423、送袋滑板组件424和滑板驱动组件425;车架421,包括平行设置的两个侧板4211、竖直平面内上下平行设置的两根第一滑轨横梁4212、滑板驱动从动轮安装板4213、滑板伺服电机安装板4214、第二齿板固定板4215、车轮组4216、限位轮4217和第二齿板4218,其中侧板4211包括主板、主板上部两侧向外延伸的形成的翼板和限位轮固定板,限位轮固定板垂直于主板,位于主板中部的前后两侧,两个侧板4211主板的内侧分别与两根第一滑轨横梁4212两端相连,用于安装第一滑轨422,滑板驱动从动轮安装板4213、滑板伺服电机安装板4214分别连接于第一滑轨横梁4212两端的上方,且与两个侧板4211垂直,每个侧板4211的翼板下表面分别连接两块第二齿板固定板4215,每块第二齿板固定板4215分别与一块第二齿板4218连接,每块第二齿板4218和翼板下表面的第二齿板固定板4215之间夹紧车体驱动组件44中的车体驱动同步带445;两个侧板4211外侧分别设置两组车轮组4216,两组车轮组4216分别与导轨41上下表面贴合,每组车轮组4216中所包含的车轮数量至少两个以上,每个侧板4211包括前后两个限位固定板,每个限位固定板固定一个限位轮4217,限位轮4217位于两个导轨41的内侧面,且与导轨41内侧面贴合,使车轮组4216只能沿导轨41方向往复直线运动。两根第一滑轨422分别固定在上下两根第一滑轨横梁4212上,两个第一滑轨滑块423分别安装在两根第一滑轨422上。
122.送袋滑板组件424包括送袋滑板4241和第一齿板4243;其中送袋滑板4241包含主板和主板顶部侧面水平延伸出的第一齿板固定板,送袋滑板4241安装在两个第一滑轨滑块423上,第一齿板4243固定在送袋滑板4241的齿板固定板上表面,第一齿板4243和送袋滑板4241顶部的齿板固定板将滑板驱动同步带4253夹紧。
123.滑板驱动组件425,包括滑板伺服电机4251、滑板驱动主动轮4252、滑板驱动同步带4253和滑板驱动从动轮4254,其中滑板伺服电机4251固定在滑板伺服电机安装板4214上,滑板驱动主动轮4252与滑板伺服电机4251的轴连接,滑板驱动从动轮4254固定在滑板驱动从动轮安装板4213上,滑板驱动同步带4253分别与滑板驱动主动轮4252、滑板驱动从动轮4254啮合,且滑板驱动同步带4253被第一齿板4243压紧于送袋滑板4241顶部的齿板固定板上,滑板伺服电机4251驱动滑板驱动主动轮4252,通过滑板驱动同步带4253带动送袋滑板组件424沿第一滑轨422方向往复直线运动。
124.如图8所示,取袋臂组件43包括大臂板431、两根第二滑轨432、两个第二滑轨滑块433、第一传动齿条434、无杆气缸435、第三滑轨436、第三滑轨滑块437、小臂组件438、抓手转动驱动伺服电机439、第一传动齿轮4311和取袋臂驱动伺服电机4310,取袋臂驱动伺服电
机4310安装在送袋滑板4241上,取袋臂驱动伺服电机4310与第一滑轨滑块423在送袋滑板4241的同一侧,第一传动齿轮4311连接在取袋臂驱动伺服电机4310轴上,大臂板431一面固定两根第二滑轨432和一根第一传动齿条434,大臂板431另一面固定无杆气缸435和1根第三滑轨436,两根第二滑轨432左右平行设置,两个第二滑轨滑块433分别安装在两根第二滑轨432上,两个第二滑轨滑块433与送袋滑板4241连接,第一传动齿条434平行设置在两根第二滑轨432之间,且与第一传动齿轮4311啮合,取袋臂驱动伺服电机4310能够通过第一传动齿轮4311和第一传动齿条434的啮合传动带动取袋臂组件43相对送袋滑板组件424沿第一传动齿条434方向往复直线运动,同时取袋臂组件43可以随送袋滑板组件424沿第一滑轨422方向往复直线运行,无杆气缸435与第三滑轨436平行设置,第三滑轨滑块437安装在第三滑轨436上,小臂组件438同时与无杆气缸435驱动块以及第三滑轨滑块437连接,小臂组件438包括垂直于大臂板431的侧臂和安装于侧壁上的转轴,转轴与大臂板431平行,转轴顶部设有上法兰,抓手转动驱动伺服电机439与小臂组件438转轴上法兰面连接,小臂组件438和抓手转动驱动伺服电机439可以在无杆气缸435驱动块作用下沿第三滑轨436方向往复直线运动。
125.如图4、5所示,车体驱动组件44包括车体驱动主动轮441、车体驱动主轴442、车体驱动轮443、车体驱动从动轮444、车体驱动同步带445、车体驱动伺服电机446、减速机447、减速机输出轮448和驱动轮驱动同步带449,其中车体驱动主轴442通过轴承固定在上框梁12的两根上梁的前端,车体驱动主轴442两端连接两个车体驱动主动轮441,车体驱动轮443连接在两个车体驱动主动轮441间的车体驱动主轴442上,两个车体驱动从动轮444分别固定在上框梁12的两根上梁的后端内侧,车体驱动同步带445分别与车体驱动主动轮441、车体驱动从动轮444啮合,车体驱动同步带445被侧板4211的第二齿板固定板4215和第二齿板4218压紧,车体驱动伺服电机446连接减速机447,减速机447固定在前立柱组件11上,减速机输出轮448与减速机447输出轴连接,驱动轮驱动同步带449分别与减速机输出轮448、车体驱动轮443啮合,车体驱动伺服电机446经减速机447驱动减速机输出轮448,并通过驱动轮驱动同步带449带动车体驱动轮443进而传动给车体驱动主轴442,车体驱动主轴442带动车体驱动主动轮441,并通过车体驱动同步带445使送袋车42和取袋臂组件43沿导轨41方向往复直线运动。
126.送袋机构4的实际工作过程如下:
127.(1)集装袋提升:取袋抓手5抓取集装袋,无杆气缸435驱动块和大臂板431同时向上运动,集装袋提升至一定高度,与成垛集装袋分离;
128.(2)集装袋移动:送袋车42沿导轨41移动,同时送袋车42中的送袋滑板组件424沿第一滑轨422移动,集装袋移动至放袋开口平台6上方;
129.(3)集装袋放置:无杆气缸435驱动块复位,大臂板431向下精确移动,取袋抓手将集装袋放置于放袋开口平台6。
130.取袋抓手5位于送袋机构4下方,用于抓取或放置单个集装袋;
131.如图9所示,取袋抓手5包括腕部组件51、取袋盘组件52、取袋抓手手指53、转动驱动气缸54、取袋抓手手指驱动气缸55、吸盘56和吸盘驱动气缸57。如图10所示,取袋盘组件52包括取袋盘521,和固定于取袋盘521上表面的固定座522、支撑立板523、u形气缸座524和吸盘驱动气缸固定座525。
132.腕部组件51通过带座轴承与固定座522连接,转动驱动气缸54尾部与腕部组件51连接,转动驱动气缸54活塞杆经关节轴承与u形气缸座524连接,转动驱动气缸54驱动取袋盘组件52绕腕部组件51转轴旋转一定角度,取袋盘521两侧短边分别设置两个取袋抓手手指53,取袋抓手手指53与支撑立板523由转轴连接,取袋抓手手指驱动气缸55尾部与u形气缸座524连接,取袋抓手手指驱动气缸55活塞杆经关节轴承与取袋抓手手指53连接,取袋抓手手指驱动气缸55可驱动手指压在取袋盘521下方,吸盘驱动气缸57安装在吸盘驱动气缸固定座525上,吸盘驱动气缸57活塞杆与吸盘56连接,吸盘驱动气缸57驱动可将吸盘56提至与取袋盘521下表面齐平。
133.放袋开口平台6位于底框梁14上方,靠近前立柱11一侧,用于将放置的集装袋袋口打开;
134.如图11和12所示,放袋开口平台6包括支撑框架组件,放袋平台62,压袋脖机构66,开口组件64,上夹袋组件65和下夹袋组件67;支撑框架组件包括平台框架61和上横架63;开口组件64包括上吸盘腔641、第四滑轨滑块642、第四滑轨643、开口气缸644和下吸盘腔645,上夹袋组件65包括上夹袋板651和上夹袋气缸652;下夹袋组件67包括下夹袋板671和下夹袋气缸672;放袋平台662固定在平台框架61上,上横架63位于放袋平台62的上方,上横架63的侧立柱固定在平台框架61上,开口组件64的第四滑轨滑块642固定在上横架63横梁上,第四滑轨643安装在第四滑轨滑块642上,上吸盘腔641与第四滑轨643连接,开口气缸644固定在上横架63横梁上,开口气缸644的活塞杆与上吸盘腔641连接,上夹袋组件65的上夹袋板651安装在上吸盘腔641上,上夹袋气缸652活塞杆通过曲柄与上夹袋板651连接,上夹袋气缸652尾部与上吸盘腔641连接。下吸盘腔645设于放袋平台62的左部,下夹袋板671安装在下吸盘腔645上,下夹袋气缸672活塞杆通过曲柄与下夹袋板671连接,下夹袋气缸672尾部与放袋平台62上的气缸座连接。上吸盘腔641用于将集装袋口上表面吸住,开口气缸644动作将上吸盘腔641、上夹袋组件65和集装袋口上表面沿滑轨方向向上移动一定高度,待集装袋口开口后,上夹袋气缸652动作使上夹袋板651旋转一定角度夹紧集装袋口上表面,下夹袋气缸672动作使下夹袋板671旋转一定角度夹紧集装袋口下表面。优选的,集装袋口为集装袋内袋内开口,内袋内开口的同时带动外袋口实现集装袋的开口。以由袋库机构2至放袋开口平台6的方向为向前,面向前方时(即在袋库机构2位置处面向放袋开口平台6时)的左右方向为本发明所述的左右方向,压袋脖机构66设于放袋平台62的右部,压袋脖机构66用于将集装袋袋脖部位压紧于放袋平台62,下夹袋组件67设于放袋平台62的左部;压袋脖机构66包含分别设于放袋平台62后部两侧的两个机械手指661和机械手指驱动气缸662,机械手指驱动气缸662活塞杆与机械手指661连接,机械手指驱动气缸662的尾部与放袋平台62气缸座连接;下吸盘腔645吸住集装袋口下表面,机械手指驱动气缸662动作使机械手指661将集装袋袋脖压紧在放袋平台62上。
135.放袋开口平台6的工作过程如下:
136.(1)吸袋口:待取袋抓手5将集装袋放置在放袋平台62后,放袋平台62下吸盘腔645吸住集装袋袋口下表面;
137.(2)压袋脖:机械手指驱动气缸662动作使机械手指661将集装袋袋脖压紧在放袋平台62上;
138.(3)开袋口:开口气缸644动作使上吸盘腔641沿滑轨向下移动至集装袋袋口上表
面并吸住,开口气缸644回位,上吸盘腔641吸着袋口上表面沿滑轨方向向上移动一定高度,完成集装袋开口;
139.(4)夹袋口:下夹袋气缸672和上夹袋气缸652同时动作,上夹袋板651和下夹袋板671同时旋转一定角度,分别将集装袋袋口上下表面夹住,完成放袋开口工作。
140.套袋机构7位于前立柱组件11上部,用于将开口的集装袋套在下料管上;如图13、14、15所示,套袋机构7包括支撑架71、套袋滑板组件72、撑袋组件73、撑袋组件驱动气缸74、电机75和第二传动齿轮76;套袋滑板组件72包括套袋滑板721、第五滑轨722、第二传动齿条723和第五滑轨滑块724,撑袋组件73包括撑袋转架731、撑袋手驱动气缸732、撑袋手733、夹指驱动气缸734和夹指735。
141.本实施例中,下料口位于套袋机构7的左侧,套袋滑板721上分别固定两根第五滑轨722和第二传动齿条723,两根第五滑轨722设置在套袋滑板721上下两端,第二传动齿条723位于两根第五滑轨722之间,并在每根第五滑轨722上安装若干第五滑轨滑块724,第五滑轨滑块724固定在支撑架71上,电机75固定安装于前立柱组件11上部,且与支撑架71固定连接,与电机75轴连接的第二传动齿轮76与第二传动齿条723啮合,撑袋组件73通过撑袋转架731与套袋滑板组件72相连,尾部固定在套袋滑板721上的撑袋组件驱动气缸74活塞杆与撑袋转架731曲柄连接,撑袋手733包括手臂和手掌,两个手掌为相对设置的弧形结构,弧形结构的手掌所对应圆柱的轴线与手臂垂直,两个撑袋手733的手臂通过转轴与撑袋转架731连接,尾部固定在撑袋转架731上的撑袋手驱动气缸732活塞杆与撑袋手733连接,夹指735经转轴安装在撑袋手733上,尾部固定在撑袋手733上的夹指驱动气缸734活塞杆与夹指735曲柄连接。
142.电机75通过齿轮齿条传动带动套袋滑板组件72沿第五滑轨722方向移动,撑袋组件驱动气缸74动作驱动撑袋组件73绕撑袋转架731转轴旋转90
°
,撑袋手驱动气缸732动作驱动撑袋手733绕撑袋手转轴旋转一定角度,使撑袋手733的手掌相互远离,夹指驱动气缸734动作驱动夹指735绕夹指转轴旋转一定角度,使夹指735压紧在撑袋手733上。
143.套袋机构7的工作过程如下:
144.初始状态:撑袋手733手臂与第五滑轨722方向垂直,为竖直向下,撑袋手733弧形手掌的轴线为水平方向;
145.(1)插入袋口:电机75通过齿轮齿条传动经套袋滑板组件72带动撑袋手733插入集装袋袋口内部;
146.(2)撑袋口:撑袋手驱动气缸732动作使撑袋手733将集装袋袋口内部两侧撑住;
147.(3)夹袋口:夹指驱动气缸734动作使夹指735旋转一定角度,夹紧袋口的内外袋;
148.(4)移袋口:电机75通过齿轮齿条传动经套袋滑板组件72带动撑袋手733和集装袋移动至下料口处;
149.(5)套袋:撑袋组件驱动气缸74动作使撑袋手733带动集装袋旋转90
°
,使撑袋手733手臂为水平方向,撑袋手733弧形手掌的轴线为竖直方向,将集装袋袋口套在下料口上,完成套袋工作。
150.本发明用于散袋叠放成垛柔性集装袋的自动套袋机的实际工作过程如下:
151.(1)集装袋口位置识别:视觉检测组件31移至袋库机构2上方,识别并算出集装袋口的具体位置信息;
152.(2)集装袋抓取:根据袋口位置信息,送袋机构4将取袋抓手5移动至集装袋口位置,吸盘56将集装袋内袋口吸起,待取袋抓手5调姿后,取袋抓手手指53将集装袋内外袋口一起夹住,完成取袋;
153.(3)集装袋移动:送袋机构4将取袋抓手5和集装袋提升至一定高度,待抓取的集装袋与袋垛分离后,再将集装袋移动至放袋平台62;
154.(4)集装袋放置:下吸盘腔645吸住集装袋内袋口下表面,压袋脖机构66将集装袋内外袋脖压紧在放袋平台62上,取袋抓手5的取袋抓手手指53松开袋口,集装袋放置完成;
155.(5)集装袋开口:上吸盘腔641沿第四滑轨643方向向下移动至集装袋内袋口上表面,吸住内袋口上表面后,上吸盘腔641沿第四滑轨643方向向上移动,带动内袋口将集装袋袋口打开;
156.(6)集装袋套袋:套袋机构7撑袋手733移动插入集装袋内袋口后,夹指735夹住集装袋袋口两侧,套袋滑板721移动带动撑袋手733和集装袋移动至下料口处,撑袋手733带动集装袋旋转90
°
,将集装袋袋口套在下料口上,完成套袋工作。
157.以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
158.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1