一种物流包装箱智能封箱机的制作方法
1.本发明涉及物流包装箱加工技术领域,具体提出了一种物流包装箱智能封箱机。
背景技术:
2.包装箱主要是为了便于物流运输装卸和仓贮,一般用木箱和瓦楞实木托盘,也有采用锡桶或白铁桶的,其次有纸质的包装箱,在这其中纸质包装箱使用尤为广泛。
3.现在,各种各样的商品都需要包装箱包装,而包装箱需要胶带封口,目前有大的流水生产线有较为成熟的封胶带系统,其主要是通过旋转机构对包装箱的外部进行缠绕,从而达到对包装箱进行封箱的目的,这种方式使用非常的普遍,但是还存在以下问题:
4.1.现有的物流包装箱智能封箱机在封箱的过程中胶带粘贴的性能差,容易导致胶带在张贴的过程中出现倾斜的情况。
5.2.现有的物流包装箱智能封箱机在封箱的过程中包装箱的稳定性差,包装箱容易在封箱的过程中受到外力后发生移动。
技术实现要素:
6.为了解决上述技术问题,本发明提供一种物流包装箱b智能封箱机,包括固定底座、固定平台与封箱平台,所述固定底座上固定安装有固定平台,固定底座上固定安装有封箱平台,封箱平台位于固定平台的正上方。
7.所述的固定平台包括夹持气缸、夹持板、限位部件与翻盖组件,固定底座的上端通过基座固定安装有两个前后对称的夹持气缸,两个夹持气缸的输出端相对分布,且两个夹持气缸的输出端上均固定安装有夹持板,夹持板为匚形结构,夹持板的内侧设置有限位部件,夹持板的上端设置有翻盖组件。
8.所述的封箱平台包括垂直支架、水平板、伸缩电动推杆、匚形封箱块、匚形槽、限位轴、胶带放置组件与按压模块,固定底座的上端固定安装有垂直支架,垂直支架的侧端固定连接有水平板,水平板的上端固定安装有伸缩电动推杆,伸缩电动推杆的输出端朝下且固定连接有匚形封箱块,匚形封箱块的中部开设有匚形槽,匚形槽的右侧转动连接有限位轴,匚形封箱块的右侧设置有胶带放置组件,匚形封箱块的内侧设置有按压模块。
9.作为本发明的优选技术方案,所述的限位部件包括夹持板的内侧固定安装的夹持弹簧杆,夹持弹簧杆远离夹持板的一侧固定有限位板。
10.作为本发明的优选技术方案,所述的翻盖组件包括夹持板上固定安装的升降气缸,升降气缸的输出端朝上分布且连接有推拉板,推拉板上开设有活动槽,推拉板上端的后侧转动连接转动轴,转动轴上等间距固定安装有翻盖板,转动轴的侧端固定连接有同步齿轮,同步齿轮的侧端啮合设置有差速齿轮,差速齿轮的侧端啮合设置有一号锥形齿轮,一号锥形齿轮的侧端啮合设置有二号锥形齿轮,二号锥形齿轮和一号锥形齿轮均转动连接在推拉板上,二号锥形齿轮上固定连接有差速轴,差速轴上等间距固定安装有与转动轴上相同的翻盖板,差速轴的侧端连接有翻转电机,翻转电机通过电机座固定在推拉板的侧壁上。
11.作为本发明的优选技术方案,所述的翻盖板的上端固定有可伸长的拉伸推杆。
12.作为本发明的优选技术方案,所述的按压模块包括转动分布在匚形封箱块内侧的链轮,链轮上啮合设置有链条,链轮的侧端固定连接有按压电机,按压电机通过电机座固定安装在匚形封箱块的外侧壁上,链轮的侧端转动连接有按压辊。
13.作为本发明的优选技术方案,所述的胶带放置组件包括匚形封箱块右侧端固定的胶带放置框,胶带放置框的内侧固定连接有用于套设胶带的固定轴。
14.作为本发明的优选技术方案,所述的匚形封箱块的左右两侧均固定安装有执行杆,两个执行杆之间共同固定有电动滑柱,电动滑柱上滑动连接有滑动块,滑动块的侧端固定安装有封箱气缸,封箱气缸的输出端朝下分布且封箱气缸的输出端上固定安装有连接板,连接板远离封箱气缸的一端固定连接有圆柱形块。
15.作为本发明的优选技术方案,所述的圆柱形块的内部为空心结构,圆柱形块的内侧固定有双向气缸,双向气缸的输出端上连接有胶带固定板。
16.作为本发明的优选技术方案,所述的匚形封箱块的内侧的前后两端均固定有匚形导向板。作为本发明的优选技术方案,所述的匚形封箱块内侧的右端固定有裁切机。
17.本发明具备以下有益效果:
18.1.本发明提供一种物流包装箱智能封箱机,封箱平台主要的作用是实现胶带的自动化张贴,保证胶带能够均匀的张贴在包装箱的表面,避免胶带张贴的过程中出现倾斜的情况。
19.2.本发明提供一种物流包装箱智能封箱机,翻盖组件通过翻盖板对包装箱的盖板进行闭合,保证包装箱在进行封箱的时候避免包装箱的盖板为闭合。
20.3.本发明提供一种物流包装箱智能封箱机,固定平台主要是对包装箱的位置进行固定,避免其在封箱的过程中受到外力发生移动而导致胶带张贴出现倾斜。
21.4.本发明提供一种物流包装箱智能封箱机,匚形导向板能够对胶带的前后两端的边缘进行限位,避免胶带在封箱的时候出现移位,从而减少了人工干预对其进行矫正,从而大大的提高了胶带张贴的效率。
附图说明
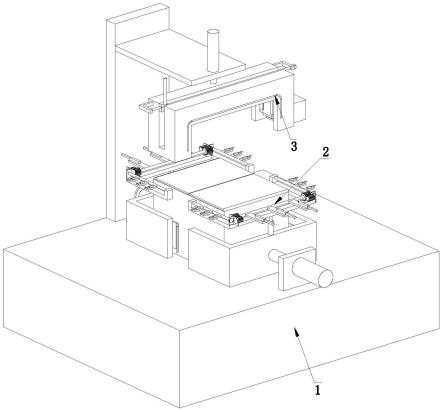
22.图1为本发明的主体结构示意图。
23.图2为本发明固定平台的部分结构示意图。
24.图3为本发明翻盖组件的部分结构示意图。
25.图4为本发明封箱平台的第一视角部分结构示意图。
26.图5为本发明封箱平台的第二视角部分结构示意图。
27.图6为本发明的剖视图。
28.图7为本发明图6中的c处局部放大图。
29.图8为本发明图6中的d处局部放大图。
30.图中:1、固定底座;2、固定平台;3、封箱平台;20、夹持气缸;21、夹持板;22、限位部件;23、翻盖组件;30、垂直支架;31、水平板;32、伸缩电动推杆;33、匚形封箱块;34、匚形槽;35、限位轴;36、胶带a放置组件;37、按压模块;221、夹持弹簧杆;222、限位板;230、升降气缸;231、推拉板;232、活动槽;233、转动轴;234、翻盖板;235、同步齿轮;236、差速齿轮;237、
一号锥形齿轮;238、二号锥形齿轮;239、差速轴;240、翻转电机;241、拉伸推杆;371、链轮;372、链条;373、按压电机;374、按压辊;360、胶带a放置框;361、固定轴;330、执行杆;331、电动滑柱;332、滑动块;333、封箱气缸;334、连接板;335、圆柱形块;336、双向气缸;337、胶带a固定板;338、匚形导向板;339、裁切机。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.参阅图1,一种物流包装箱智能封箱机,包括固定底座1、固定平台2与封箱平台3,所述固定底座1上固定安装有固定平台2,固定底座1上固定安装有封箱平台3,封箱平台3位于固定平台2的正上方。
33.具体工作时,首先操作人员将物流包装箱b放置到固定平台2上进行固定,随后通过封箱平台3对物流包装箱b进行封箱作业。
34.参阅图2,所述的固定平台2包括夹持气缸20、夹持板21、限位部件22与翻盖组件23,固定底座1的上端通过基座固定安装有两个前后对称的夹持气缸20,两个夹持气缸20的输出端相对分布,且两个夹持气缸20的输出端上均固定安装有夹持板21,夹持板21为匚形结构,夹持板21的内侧设置有限位部件22,夹持板21的上端设置有翻盖组件23;所述的限位部件22包括夹持板21的内侧固定安装的夹持弹簧杆221,夹持弹簧杆221远离夹持板21的一侧固定有限位板222。
35.具体工作时,首先操作人员将包装箱b放置到固定底座1上,随后夹持气缸20带动夹持板21同时对包装箱b进行夹持固定,随后夹持板21上的限位板222对包装箱b进行挤压固定,当包装箱b被夹持之后通过翻盖组件23对包装箱b的开口的位置的盖板进行密封,固定平台2主要的作用是提高对包装箱b固定的稳定性,避免包装箱b在进行封箱的过程中发生偏移。
36.参阅图3,所述的翻盖组件23包括夹持板21上固定安装的升降气缸230,升降气缸230的输出端朝上分布且连接有推拉板231,推拉板231上开设有活动槽232,推拉板231上端的后侧转动连接转动轴233,转动轴233上等间距固定安装有翻盖板234,转动轴233的侧端固定连接有同步齿轮235,同步齿轮235的侧端啮合设置有差速齿轮236,差速齿轮236的侧端啮合设置有一号锥形齿轮237,一号锥形齿轮237的侧端啮合设置有二号锥形齿轮238,二号锥形齿轮238和一号锥形齿轮237均转动连接在推拉板231上,二号锥形齿轮238上固定连接有差速轴239,差速轴239上等间距固定安装有与转动轴233上相同的翻盖板234,转动轴233的侧端连接有翻转电机240,翻转电机240通过电机座固定在推拉板231的侧壁上;所述的翻盖板234的上端固定有可伸长的拉伸推杆241。
37.具体工作时,当固定平台2将包装箱b固定好之后,初始状态下升降气缸230的输出端未伸出,并且推拉板231的位置低于包装箱b的高度,接着升降气缸230启动,升降气缸230的输出端带动推拉板231与包装箱b的高度一致,此时包装箱b的开口处的盖板抵靠在推拉板231的上端,随后翻转电机240启动,翻转电机240带动转动轴233转动,转动轴233在转动
的过程中通过同步齿轮235和差速齿轮236形成速度差,同时转动轴233通过一号锥形齿轮237和二号锥形齿轮238带动差速轴239转动,首先差速轴239带动其上端的翻盖板234先绕差速轴239转动,接着差速轴239上的翻盖板234推动包装箱b左右两侧的盖板绕连接点转动直至包装箱b左右两侧的盖板将包装箱b的上端的开口遮盖,接着通过差速齿轮236使得转动轴233转动的速度慢一些,此时转动轴233将其上端的翻盖板234转动至包装箱b上端的开口处,此时包装箱b上的盖板均遮盖好包装箱b的开口处之后,随后进行封箱作业。
38.参阅图4、图5、图6和图8,所述的封箱平台3包括垂直支架30、水平板31、伸缩电动推杆32、匚形封箱块33、匚形槽34、限位轴35与胶带a放置组件36,固定底座1的上端固定安装有垂直支架30,垂直支架30的侧端固定连接有水平板31,水平板31的上端固定安装有伸缩电动推杆32,伸缩电动推杆32的输出端朝下且固定连接有匚形封箱块33,匚形封箱块33的中部开设有匚形槽34,匚形槽34的右侧转动连接有限位轴35,匚形封箱块33的右侧设置有胶带a放置组件36;所述的胶带a放置组件36包括匚形封箱块33右侧端固定的胶带a放置框360,胶带a放置框360的内侧固定连接有用于套设胶带a的固定轴361;所述的匚形封箱块33的左右两侧均固定安装有执行杆330,两个执行杆330之间共同固定有电动滑柱331,电动滑柱331上滑动连接有滑动块332,滑动块332的侧端固定安装有封箱气缸333,封箱气缸333的输出端朝下分布且封箱气缸333的输出端上固定安装有连接板334,连接板334远离封箱气缸333的一端固定连接有圆柱形块335;所述的圆柱形块335的内部为空心结构,圆柱形块335的内侧固定有双向气缸336,双向气缸336的输出端上连接有胶带a固定板337;所述的匚形封箱块33的内侧的前后两端均固定有匚形导向板338;所述的匚形封箱块33内侧的右端固定有裁切机339。
39.具体工作时,当包装箱b的盖板遮盖好包装箱b的开口之后,初始状态下,圆柱形块335位于匚形封箱块33的内侧的右端,随后双向气缸336启动,双向气缸336的输出端带动两个胶带a固定板337同时向内侧移动,直至胶带a固定板337对胶带a的活动端进行固定,接着封箱气缸333带动胶带a固定板337向上移动,随后通过电动滑柱331带动滑动块332从右向左沿着匚形槽34移动,然后封箱气缸333阿调动胶带a固定板337再次向下移动,此时胶带a沿着匚形导向板338移动,并且胶带a成匚形结构且位于包装箱b的上方,随后伸缩电动推杆32带动整个匚形封箱块33向下移动,且是的匚形封箱块33抵靠在包装箱b上,匚形导向板338上端的按压模块37启动,通过按压模块37将胶带a抵靠在包装箱b的表面,并且通过按压模块37对胶带a表面进行往复的滚动,直至胶带a紧紧的张贴的包装箱b上,随后裁切机339将胶带a切断,最后重复上述的操作对包装箱b进行智能化封箱作业,封箱平台3主要的作用是实现胶带a的自动化张贴,保证胶带a能够均匀的张贴在包装箱b的表面,避免胶带a张贴的过程中出现倾斜的情况。
40.参阅图8,所述的按压模块37包括转动分布在匚形封箱块33内侧的链轮371,链轮371上啮合设置有链条372,链轮371的侧端固定连接有按压电机373,按压电机373通过电机座固定安装在匚形封箱块33的外侧壁上,链轮371的侧端转动连接有按压辊374。具体工作时,按压电机373启动,按压电机373带动链轮371转动,链轮371转动的过程中带动按压辊374沿着链条372转动的方向移动,按压辊374在转动的过程中对胶带a进行挤压,胶带a在受到挤压之后其粘贴的一端与包装箱b的表面进行紧密的接触,从而实现胶带a对包装箱b进行封箱作业。
41.此外,本发明在工作时包括以下步骤:步骤一:操作人员将包装箱b放置到固定底座1上,随后夹持气缸20带动夹持板21同时对包装箱b进行夹持固定,随后夹持板21上的限位板222对包装箱b进行挤压固定,当包装箱b被夹持之后通过翻盖组件23对包装箱b的开口的位置的盖板进行密封,固定平台2主要的作用是提高对包装箱b固定的稳定性,避免包装箱b在进行封箱的过程中发生偏移。
42.步骤二:固定平台2将包装箱b固定好之后,初始状态下升降气缸230的输出端未伸出,并且推拉板231的位置低于包装箱b的高度,接着升降气缸230启动,升降气缸230的输出端瑞东推拉板231与包装箱b的高度一致,此时包装箱b的开口处的盖板抵靠在推拉板231的上端,随后翻转电机240启动,翻转电机240带动转动轴233转动,转动轴233在转动的过程中通过同步齿轮235和差速齿轮236形成速度差,同时转动轴233通过一号锥形齿轮237和二号锥形齿轮238带动差速轴239转动,差速轴239带动其上端的翻盖板234先绕差速轴239转动,接着差速轴239上的翻盖板234推动包装箱b左右两侧的盖板绕连接点转动直至包装箱b左右两侧的盖板将包装箱b的上端的开口遮盖,接着通过差速齿轮236使得转动轴233转动的速度慢一些,此时转动轴233将其上端的翻盖板234转动至包装箱b上端的开口处,此时包装箱b上的盖板均遮盖好包装箱b的开口处。
43.步骤三:当包装箱b的盖板遮盖好包装箱b的开口之后,初始状态下,圆柱形块335位于匚形封箱块33的内侧的右端,随后双向气缸336启动,双向气缸336的输出端带动两个胶带a固定板337同时向内侧移动,直至胶带a固定板337对胶带a的活动端进行固定,接着封箱气缸333带动胶带a固定板337向上移动,随后通过电动滑柱331带动滑动块332从右向左沿着匚形槽34移动,然后封箱气缸333阿调动胶带a固定板337再次向下移动,此时胶带a沿着匚形导向板338移动,并且胶带a成匚形结构且位于包装箱b的上方,随后伸缩电动推杆32带动整个匚形封箱块33向下移动,且是的方形封箱块抵靠在包装箱b上,匚形导向板338上端的按压模块37启动,通过按压模块37将胶带a抵靠在包装箱b的表面,并且通过按压模块37对胶带a表面进行往复的滚动,直至胶带a紧紧的张贴的包装箱b上,随后裁切机339将胶带a切断,最后重复上述的操作对包装箱b进行智能化封箱作业。
44.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1