一种盖板玻璃清洗槽上下料装置的制作方法
1.本实用新型涉及一种盖板玻璃清洗槽上下料装置。
背景技术:
2.盖板玻璃在使用前需要进行清洗,清洗时是人工将清洗框手动放入清洗线,耗时长、效率慢、人工劳动强度高。因此,需要一种能够配合清洗机使用,而且能够自动上下料的设备将装有盖板玻璃的清洗框放入清洗槽,完成清洗。
技术实现要素:
3.本实用新型针对上述现有技术中存在的问题进行了改进,即本实用新型要解决的技术问题是提供一种将装有盖板玻璃的清洗框放入清洗槽的自动上下料设备。
4.为了解决上述技术问题,本实用新型的技术方案是:一种盖板玻璃清洗槽上下料装置,包括:
5.机架,机架设有龙门支撑轨道,龙门支撑轨道设有机械手,机械手包括横向机械手和设于横向机械手的纵向机械手;
6.上料皮带、下料皮带,上料皮带和下料皮带设有光电感应装置,上料皮带和下料皮带用于运输装有盖板玻璃的清洗框,分别设于清洗槽的两侧。
7.作为优选的技术实施方案,纵向机械手设有机械夹爪。
8.作为优选的技术实施方案,纵向机械手设有气缸结构,气缸结构与机械夹爪连接,带动机械夹爪上下运动。
9.作为优选的技术实施方案,还包括电磁阀,电磁阀用于控制气缸结构。
10.作为优选的技术实施方案,机械夹爪包括至少4个勾起部件,勾起部件分别对称设于机械夹爪下方的两侧。
11.作为优选的技术实施方案,对称设于机械夹爪下方两侧的勾起部件之间的间距与清洗框顶部的宽度一致,能够勾起清洗框。
12.作为优选的技术实施方案,机架下方设有万向车轮,万向车轮至少设有6个。
13.作为优选的技术实施方案,机架下方还设有可折叠底座,底座设于靠近万向车轮处。
14.作为优选的技术实施方案,上料皮带和下料皮带设有调速电机。
15.作为优选的技术实施方案,还包括电控箱,用于控制整个装置运行。
16.本实用新型相对于现有技术取得了以下技术效果:(1)全自动盖板玻璃清洗上下料装置可以与盖板玻璃清洗机配合使用,当工作时,可将装置推来使用,工作完毕后,可以移走;(2) 设有全自动机械手,通过横向和纵向机械手的运动可以实现自动抓取装有盖板玻璃的清洗框,操作精准、简单、效率高,大大节约人工成本。
附图说明:
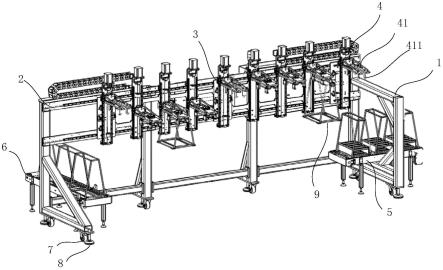
17.图1为本实用新型实施例提供的一种盖板玻璃清洗槽上下料装置结构示意图;
18.图2为本实用新型实施例提供的一种盖板玻璃清洗槽上下料装置结构示意图;
19.图3为本实用新型实施例提供的一种盖板玻璃清洗槽上下料装置的纵向机械手的结构示意图。
20.附图标记说明
21.1-机架;2-龙门支撑轨道;3-横向机械手;4-纵向机械手;41-机械夹爪;411-勾起部件; 5-上料皮带;6-下料皮带;7-万向车轮;8-底座;9-清洗框;10-清洗机;101-清洗槽。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型具体实施例及相应的附图对本实用新型技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是本实用新型产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.如图1-图2所示,本实用新型实施例提供的一种盖板玻璃清洗槽上下料装置结构示意图,该装置包括机架1、还包括上料皮带5和下料皮带6,上料皮带5和下料皮带6设有光电感应装置。工作时,将上料皮带5和下料皮带6分别设于清洗机10两侧。上料皮带5和下料皮带6都设有备料区和取料区。上料皮带5和下料皮带6用于运输装有盖板玻璃的清洗框9。优选的,机架1上设有龙门支撑轨道2,龙门支撑轨道2用于支撑横向机械手3和纵向机械手4,横向机械手3与龙门支撑轨道2连接,可以横向移动,纵向机械手4设于横向机械手3上,通过横向机械手3移动带动纵向机械手4到达指定位置。
25.如图3所示,为本实用新型实施例提供的一种盖板玻璃清洗槽上下料装置的纵向机械手4 的结构示意图。在纵向机械手4上设有机械夹爪41,还设有气缸结构,气缸结构与机械夹爪 41连接,气缸结构上下运动带动机械夹爪41上下运动。气缸结构通过电磁阀控制。机械夹爪 41包括至少4个勾起部件411,分别对称设于机械夹爪41下方的两侧。对称设于机械夹爪41 下方两侧的勾起部件411之间的间距与清洗框9顶部的宽度一致,能够勾起所述清洗框9。本实施例中,纵向机械手4设有9个,实际工作中,可根据清洗机10情况来适应设置。
26.如图1-图2所示,在机架1下方还设有万向车轮7,万向车轮7至少设有4个,本实施例中万向车轮7数量为6个,在机架1下方,靠近万向车轮7处,还设有底座8,该底座8是可以折叠的。在需要移动机架1时,将底座8折叠起,当需要停下来固定时,将底座8再打开放下,底座8支撑在地面,万向车轮7离开地面。
27.更进一步地,在上料皮带5和下料皮带6上设有调速电机,可以实时控制上下料的
速度,还包括电控箱,用于控制整个装置的工作过程。
28.工作时,把该装置移动并入清洗机10,接好气和电,配合清洗机10自动清洗玻璃盖板。人工将装有玻璃盖板的清洗框9放进上料皮带5的备料区,光电感应到有料后皮带转动,把清洗框9运输到工作取料区,横向机械手3把9个纵向机械手4移动到工作位,气缸结构带动机械夹爪41下降,机械夹爪41夹取清洗框9,气缸结构在带动机械夹爪41提升到一定高度,横移机械手移动一个工位,将清洗框9放入清洗机10的第一个清洗槽101内,第一个清洗槽 101内的清洗框9移动到第二个槽内,依次类推,第八个清洗槽101内的清洗框9放入下料皮带6的工作位上。纵向机械手4将清洗框9抓取上下移动清洗,所有的纵向机械手4可根据槽口功能需求,进行高度、频率的设置,下料皮带6感应到有料之后,皮带把清洗框9带到备料区。一个循环结束。
技术特征:
1.一种盖板玻璃清洗槽上下料装置,其特征在于,包括:机架,所述机架设有龙门支撑轨道,所述龙门支撑轨道设有机械手,所述机械手包括横向机械手和设于所述横向机械手的纵向机械手;上料皮带、下料皮带,所述上料皮带和下料皮带设有光电感应装置,所述上料皮带和下料皮带用于运输装有盖板玻璃的清洗框,分别设于所述清洗槽的两侧。2.根据权利要求1所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述纵向机械手设有机械夹爪。3.根据权利要求2所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述纵向机械手设有气缸结构,所述气缸结构与所述机械夹爪连接,带动所述机械夹爪上下运动。4.根据权利要求3所述的一种盖板玻璃清洗槽上下料装置,其特征在于,还包括电磁阀,所述电磁阀用于控制所述气缸结构。5.根据权利要求2所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述机械夹爪包括至少4个勾起部件,所述勾起部件分别对称设于机械夹爪下方的两侧。6.根据权利要求5所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述对称设于机械夹爪下方两侧的勾起部件之间的间距与所述清洗框顶部的宽度一致,能够勾起所述清洗框。7.根据权利要求1所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述机架下方设有万向车轮,所述万向车轮至少设有6个。8.根据权利要求7所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述机架下方还设有可折叠底座,所述底座设于靠近所述万向车轮处。9.根据权利要求1所述的一种盖板玻璃清洗槽上下料装置,其特征在于,所述上料皮带和下料皮带设有调速电机。10.根据权利要求1所述的一种盖板玻璃清洗槽上下料装置,其特征在于,还包括电控箱,用于控制整个所述装置运行。
技术总结
本实用新型涉及一种盖板玻璃清洗槽上下料装置,包括机架,机架设有龙门支撑轨道,龙门支撑轨道设有机械手,机械手包括横向机械手和设于横向机械手的纵向机械手;上料皮带、下料皮带,上料皮带和下料皮带设有光电感应装置,上料皮带和下料皮带用于运输装有盖板玻璃的清洗框,分别设于清洗槽的两侧。其中,纵向机械手设有机械夹爪,还设有气缸结构,气缸结构与机械夹爪连接,带动机械夹爪上下运动。还包括电磁阀,电磁阀用于控制气缸结构。本实用新型提供一种全自动装置可以与盖板玻璃清洗机配合使用,通过动机械手,实现自动抓取清洗框,操作精准、简单、效率高。效率高。效率高。
技术研发人员:文济南 勾大军 韩宇峰
受保护的技术使用者:深圳市隆利科技股份有限公司
技术研发日:2022.04.06
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1