一种双头伸缩吊臂及吊机的制作方法
1.本实用新型涉及一种起重设备,特别涉及一种双头伸缩吊臂及吊机。
背景技术:
2.吊机是起重机的通俗称呼,在船舶、设备、机械、模具等一系列重工产品有广泛的应用。现有技术中,吊机上设有吊臂,吊臂上设有液压装置和转动装置,液压装置与转动装置连接,转动装置与吊臂连接,转动装置在液压装置驱动下转动,带动吊臂转动。然而,吊臂是围绕吊机的外侧曲线运动,从而将悬挂于吊臂上的物品从吊机的一端经过吊机的一侧运输至吊机的另一端,运输行程长,工作效率低,结构复杂。而且,通过此吊臂,吊机在运输的物品的重量过大时容易侧翻。
技术实现要素:
3.本实用新型要解决的技术问题是吊臂是围绕吊机的外侧曲线运动,从而将悬挂于吊臂上的物品从吊机的一端经过吊机的一侧运输至吊机的另一端,运输行程长,工作效率低,所吊物体的距离小,结构复杂。而且,通过此吊臂,吊机在运输的物品的重量过大时容易侧翻,为此提供一种双头伸缩吊臂及吊机。
4.本实用新型解决其技术问题所采用的技术方案是:
5.本实用新型之双头伸缩吊臂,包括:臂套、臂体和牵引机构,所述臂套的内侧壁上设有复数个滑动件ⅰ,复数个所述滑动件ⅰ沿所述臂套的侧壁延伸的方向排列;所述臂体位于所述臂套内,并位于所述滑动件ⅰ上;所述牵引机构位于所述臂体的下方,并且连接有悬挂件。
6.进一步,所述臂套的外侧壁上设有复数个沿所述臂套的侧壁延伸的方向排列的滑动件ⅱ,所述臂体上设有限位件,所述限位件与所述滑动件ⅱ对应设置。
7.进一步,所述牵引机构包括卷扬机、导向轮和导向件,所述卷扬机上设有传动件,所述传动件依次通过所述导向轮和所述导向件与所述悬挂件连接。
8.进一步,所述导向件为滚轮,所述传动件为绳体,所述绳体通过所述导向轮和所述滚轮与所述悬挂件连接。
9.进一步,所述导向件为齿轮,所述传动件为链条,所述链条通过所述导向轮和所述齿轮与所述悬挂件连接。
10.进一步,所述牵引机构包括滑轮轨道、固定柱、收放线马达和第一传动绳,所述滑轮轨道设于所述臂体的底部上;所述收放线马达设于所述臂套的外侧壁上;所述固定柱为两个,两个所述固定柱分别设于所述滑轮轨道侧壁的左右两端;所述第一传动绳缠绕设置于所述收放线马达的输出轴上,并且所述第一传动绳的两端分别与两个所述固定柱固定连接。
11.进一步,所述滑轮轨道的下方设有沿滑轮轨道长度方向排列的牵引马达和绕线马达;所述滑轮轨道的内侧壁的两端上分别设有两个定滑轮;所述滑轮轨道上滑动连接有移
线装置;所述牵引马达和所述绕线马达上设有第二传动绳,所述第二传动绳依次通过所述定滑轮和所述移线装置与所述悬挂件连接。
12.进一步,所述悬挂件包括连接部和斗体,所述连接部与所述斗体连接。
13.进一步,所述悬挂件包括挂架和复数个挂钩,复数个所述挂钩与所述挂架连接。
14.本实用新型之吊机,包括:机架和上述双头伸缩吊臂,所述双头伸缩吊臂固定安装于所述机架上。
15.本实用新型之吊臂具有如下优点:
16.①
通过在臂套的内侧壁上设有滑动件ⅰ,臂体位于臂套内,并设于滑动件ⅰ上,这样臂体能够在臂套内做直线往返运动,从而改变臂体在臂套的内的行程位置,运输行程短,工作效率高,结构简单;
17.②
通过在臂套的侧壁内外两侧分别设置滑动件ⅰ和滑动件ⅱ,并且设置限位件,限位件与位于臂套的外侧壁的滑动件对应设置,这样能够增加臂体在臂套21上滑动的稳定性;
18.③
通过设置卷扬机、导向轮和导向件,卷扬机的驱动作用下,带动传动件通过导向轮和导向件,使悬挂件沿臂体的长度方向运动。
19.本实用新型之吊机具有如下优点:
20.双头伸缩吊臂省去了液压装置和转动装置,能够从吊架上分离出来,像吊葫芦一样独立使用的小型化产品应用到需要的各种领域。并且,双头伸缩吊臂运输物品的路径为直线并且始终位于吊机的中间,使吊机的重心时刻位于中间,运输的物品的重量过大时不易侧翻,稳定性强;
附图说明
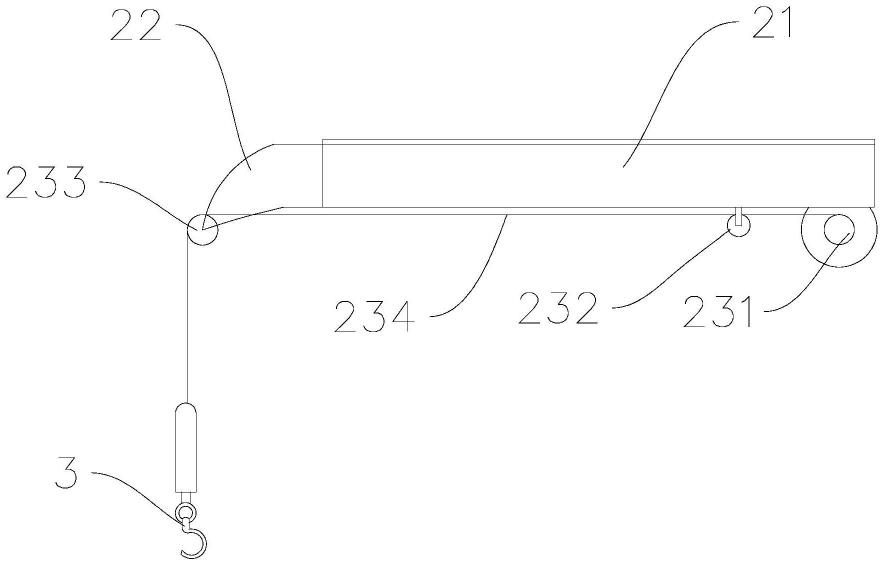
21.图1为一实施例所示的双头伸缩吊臂的结构示意图;
22.图2为图1所示的双头伸缩吊臂的臂套和臂体的一剖视图;
23.图3为图1所示的双头伸缩吊臂的另一剖视图;
24.图4为图1所示的双头伸缩吊臂的又一剖视图;
25.图5为一实施例的双头伸缩吊臂的臂套和臂体的一剖视图;
26.图6为其中一实施例的双头伸缩吊臂的结构示意图;
27.图7为其中一实施例的双头伸缩吊臂的结构示意图;
28.图8为其中一实施例的双头伸缩吊臂的结构示意图;
29.图9为图8的双头伸缩吊臂的滑轮轨道和移线装置其中一视角的示意图;
30.图10为图8的仰视图;
31.图11为其中一实施例的双头伸缩吊臂的悬挂件的正视图;
32.图12为图11左视图;
33.图13为其中一实施例的双头伸缩吊臂的悬挂件的正视图;
34.图14为图13的左视图;
35.图15为其中一实施例的双头伸缩吊臂的悬挂件的正视图;
36.图16为一实施例所示吊机的剖视图;
37.图17为图16所示吊机的另一运动状态的剖视图;
38.图18为图16所示吊架的结构示意图;
39.图19为图16所示梯子的结构示意图。
40.图中:1-机架,11-吊架,111-横梁,12-梯子,121-梯板,13-连接件, 2-双头伸缩吊臂,21-臂套,211-滑动件ⅰ,212-滑动件ⅱ,22-臂体,221-限位件,231-卷扬机,232-导向轮,233-导向件,2331-齿轮,2332-滚轮,234
‑ꢀ
传动件,2341-链条,2342-绳体,2343-重锤,241-滑轮轨道,242-固定柱, 243-收放线马达,244-第一传动绳,245-牵引马达,246-绕线马达,247-定滑轮,248-移线装置,2481-动滑轮,2482-滑轮,249-第二传动绳,250-可移位定滑轮,3-悬挂件,31-连接部,32-斗体,33-挂架,331-滑槽,34-挂钩,341
‑ꢀ
卡紧部,4-肋板,41-定位孔,5-行走轮。
具体实施方式
41.以下结合附图及实施例对本实用新型作进一步说明。
42.如图1至图14所示,本实施例提供一种双头伸缩吊臂,该双头伸缩吊臂能够用于工程车辆、冲床以及起重机等设备。
43.如图1至图2所示,双头伸缩吊臂包括臂套21、臂体22和牵引机构,臂套 21的内侧壁上设有复数个滑动件ⅰ211,复数个滑动件ⅰ211沿臂套21的侧壁延伸的方向排列;臂体22位于臂套21内,并位于滑动件ⅰ211上;牵引机构位于臂体22的下方,并且连接有悬挂件3。
44.其中,滑动件ⅰ211为两排,分别设于臂套21的两内侧壁上,两排滑动件ⅰ211之间被配置为留有间隙,该间隙能够允许臂体22通过。臂体22的外径配置于略小于臂套21的内径,并且臂体22的头部配置为能够通过臂套21,这样能够使臂体22完全穿过臂套21,增加双头伸缩吊臂的运输距离。
45.本实施例中,通过在臂套21的内侧壁上设有滑动件ⅰ211,臂体22位于臂套21内,并设于滑动件ⅰ211上,这样臂体22能够在臂套21内做直线往返运动,从而改变臂体22在臂套21的内的行程位置,运输行程短,工作效率高,结构简单。
46.在其他实施例中,滑动件ⅰ211为一排,一排滑动件ⅰ211设于臂套21的其中一侧壁上,并且与另一侧壁之间有一定间距,该间距允许臂体22通过。
47.如图5所示,在一个实施例中,臂套21的外侧壁上设有复数个沿臂套21 的侧壁延伸的方向排列的滑动件ⅱ212,臂体22上设有限位件221,限位件221 与滑动件ⅱ212对应设置。
48.本实施例中,通过在臂套21的侧壁内外两侧设置滑动件ⅰ211和滑动件
ⅱꢀ
212,并且设置限位件221,限位件221与位于臂套21的外侧壁的滑动件ⅱ212 对应设置,这样能够增加臂体22在臂套21上滑动的稳定性。
49.如图1和图2所示,牵引机构包括卷扬机231、导向轮232和导向件233,卷扬机231上设有传动件234,传动件234依次通过导向轮232和导向件224与悬挂件3连接。
50.本实施例中,通过设置卷扬机231、导向轮232和导向件233,卷扬机231 的驱动作用下,带动传动件234通过导向轮232和导向件224,使悬挂件3沿臂体22的长度方向运动。
51.如图6所示,在一个具体的实施例中,导向件233为滚轮2332,传动件234 为绳体2342,绳体2342通过导向轮232和滚轮2332与悬挂件3连接。
52.本实施例中,通过设置导向件233为滚轮2332,传动件234为绳体2342,卷扬机231
带动绳体2342通过导向轮232和滚轮2332,以带动悬挂件3沿臂体 22的长度方向运动,绳体2342无焊接点,自重低,运动时不会产生滑以和摩擦,适应于高空操作。
53.如图7所示,在一个具体的实施例中,导向件233为齿轮2331,传动件234 为链条2341,链条2341通过导向轮232和齿轮2331与悬挂件3连接。
54.其中,链条2341的一端设有重锤2343,以作为吊起物品的配重。重锤2343 的个数和重量可根据物品的重量配置。当物体过重时,可以增加重锤2343的重量或在重锤2343的下方加更多的重锤2343,以平衡物体的重量。
55.本实施例中,通过设置导向件233为齿轮2331,传动件234为链条2341,链条2341分别与导向轮232和齿轮2331连接,链条2341具备刚性,这样能够实现多引擎牵引而且不容易脱断,实用性强。
56.如图8、图9和图10所示,在一个实施例中,牵引机构包括滑轮轨道241、固定柱242、收放线马达243和第一传动绳244,滑轮轨道241设于臂体22的底部上;收放线马达243设于臂套21的外侧壁上;固定柱242为两个,两个固定柱242分别设于滑轮轨道241侧壁的左右两端;第一传动绳244缠绕设置于收放线马达243的输出轴上,并且第一传动绳244的两端分别与两个固定柱242固定连接。
57.其中,第一传动绳244为两股,缠绕设置于收放线马达243的第一传动绳 244同心且方向相反设置,并且两股第一传动绳244的长度大于等于吊臂22在臂套21内运动的行程距离。
58.在一个具体的实施例中,臂套21的外侧壁上固定设置两个可移位定滑轮250,收放线马达243位于两个可移位定滑轮250之间,第一传动绳244通过两个可移位定滑轮250与收放线马达243的输出轴连接。
59.其中,臂套21的外侧壁上设有马达机架(图中未示出),收放线马达243 固定于马达机架上。缩小了收放线马达243与固定柱242之间的距离,从而带动了臂体22的移动。
60.本实施例中,通过设置滑轮轨道241、固定柱242、收放线马达243和第一传动绳244,在收放线马达243的驱动作用下,由于第一传动绳244的两端固定设于固定柱242上,使收放线马达243沿臂套21的长度方向运动,从而实现臂套21与臂体22的相对运动。
61.如图9和图10所示,滑轮轨道241的下方设有沿滑轮轨道241长度方向排列的牵引马达245和绕线马达246;滑轮轨道241的内侧壁的两端上分别设有两个定滑轮247;滑轮轨道241上滑动连接有移线装置248;牵引马达245 和绕线马达246上设有第二传动绳249,第二传动绳249依次通过定滑轮247 和移线装置248与悬挂件3连接。
62.其中,如图9所示,移线装置248包括动滑轮2481和与动滑轮2481的两侧连接的两个滑轮2482,滑轮2482至少部分与滑轮轨道241的底壁接触,以在第一传动件234的带动下,沿着滑轮轨道241的运动。
63.其中,牵引马达245用于通过第二传动绳249带动移线装置248在滑轮轨道241内做直线运动。当仅开启牵引马达245时,由于第二传动绳249的一端被固定,移线装置248在滑轮轨道241内做直线运动的同时会带动悬挂件3做升降运动,适用于需要升降并且沿吊臂的长度方向运输物品的场景。
64.当开启牵引马达245和绕线马达246时,牵引马达245带动悬挂件3做升降运动。在绕线马达246的驱动作用下,通过第二传动绳249带动移线装置248 转动,以带动带动悬挂
件3做升降运动。
65.当牵引马达245与绕线马达246的两者其一收紧第二传动绳249,两者另一放松第二传动绳249时绕线马达246阻碍牵引马达245带动悬挂件3做升降运动,使悬挂件3沿着平行于吊臂长度方向做直线运动,适于沿吊臂的长度方向运输物品的场景。
66.当牵引马达245与绕线马达246皆收紧或放松第二传动绳249时,能够使悬挂件3快速升降,以提高物品的运输效率。
67.本实施例中,通过设置牵引马达245、绕线马达246、定滑轮247、移线装置248以及第二传动绳249的配合,使牵引机构能够满足适用于需要升降并且沿吊臂的长度方向运输物品和适于沿吊臂的长度方向运输物品的场景,实用性强。
68.如图11和图12所示,在其中一个实施例中,悬挂件3包括连接部31和斗体32,连接部31与斗体32连接。
69.其中,斗体32用于承载物品,斗体32可根据承载物品的种类配置为两端开口或封闭。其中,物品为袋装、零散、箱体的形式。
70.本实施例中,通过配置悬挂件3为连接部31和斗体32,斗体32中能够装载物品,并不限于物品的形状和种类,实用性强。
71.如图13和图14所示,在其中一个实施例中,悬挂件3包括挂架33和复数个挂钩34,复数个挂钩34与挂架33连接。其中,挂钩为5个,用于同时悬挂 5个物品。
72.在本实施例中,通过设置挂架33,挂架33上设有复数个挂钩34,能够同时悬挂多个物品,悬挂件3的工作效率高。
73.在一个具体的实施例中,如图13所示,挂架33的至少一侧设有沿挂架33 长度方向延伸的滑槽331,挂钩34的上端设有与滑槽331对应设置的卡紧部341。
74.优选地,滑槽331设于挂架33的两侧,卡紧部341由挂架33的两侧卡设于滑槽331,这样挂钩34的安装牢固可靠。
75.本实施例中,通过滑槽331与卡紧部341的配合,挂钩34能够沿着滑槽331 上滑动,这样一方面能够调整相邻的两个挂钩34之间的位置,另一方面能够根据需悬挂物品的重量设置挂钩34的数量,实用性强。
76.如图15所示,在其中一实施例中,复数个挂钩34与挂架33固定连接。
77.上述任一实施例的一种双头伸缩吊臂的工作原理如下:
78.如图3所示,当需要运输物品或需要增长的伸缩吊臂的长度时,沿第一方向,即图中所示箭头方向,拉动臂体22,臂体22带动滑动件ⅰ211逆时针转动,并相对于臂套21向第一方向运动。如图4所示,臂体22的长度变长。
79.如图4所示,当悬挂件3挂设有物品,需要减少伸缩吊臂的长度时,向与第一方向相反的第二方向拉动臂体22,使臂体22带动滑动件ⅰ211顺时针转动,并相对于臂套21向第二方向运动。如图3所示,双头伸缩吊臂的长度变短。
80.如图16至图19所示,本实用新型的一实施例提供一种吊机,吊机用于楼层高层、车厢内外以及工厂等多个使用场景。
81.如图16至图17所示,吊机包括:机架1和上述任一实施例的双头伸缩吊臂2,双头伸缩吊臂2固定安装于机架1上。
82.在相关技术中,吊臂上设有液压装置和转动装置,液压装置与转动装置连接,转动
装置与吊臂连接,转动装置在液压装置驱动下转动,并带动吊臂转动,以将挂设于悬挂件上的物品运输至指定位置。
83.与相关技术比较,本实施例的双头伸缩吊臂2省去了液压装置和转动装置,能够从吊架11上分离出来,像吊葫芦一样独立使用的小型化产品应用到需要的各种领域。双头伸缩吊臂2运输物品的路径为直线并且始终位于吊机1的中间,使吊机1的重心时刻位于吊机1的中间,运输的物品的重量过大时不易侧翻,稳定性强。
84.如图18和图19所示,机架1包括吊架11、梯子12和连接件13,吊架11 通过连接件13与梯子11连接,吊架11上设有横梁111,梯子12包括梯架121 和沿梯架121方向排列的复数个梯板121。
85.其中,横梁111和梯板121上分别设有两个卡销(图中未示出),臂套21 上设有肋板4,肋板4上开有定位孔41。通过卡销与定位孔41的配合,实现横梁111和梯板121与臂套21的固定连接,使机架1与肋板4的连接稳固可靠。
86.其中,梯子12相对于吊架11倾斜设置,用于增加杠杆力臂的距离,进一步增强了双头伸缩吊臂2的载重能力。其中,当悬挂件3上挂有物体时,需有人站在梯子12上,以人的重量作为配重以平衡物体的重量。臂套21和梯子12 用于悬挂件3吊起物品的配重,以保证吊机的稳定性。除首尾两梯板121外,其余的梯板121与梯架121可拆卸连接。
87.本实施例中,通过设置梯子12,在墙壁安装作业时,通过双头伸缩吊臂2 运输物品,同时工作人员站在梯子12上进行操作,操作方便可靠。
88.在一个具体的实施例中,机架1的底端设有行走轮5。
89.在本实施例中,通过设置行走轮5,当吊起物体时,行走轮5能够带动机架 1运动,以增大吊机1的运输范围。
90.本实施例提供的吊机1的工作原理,如下:
91.如图16所示,当需要运输物品时,沿箭头所示方向拉动臂体22,臂体22 带动滑动件211逆时针转动,并相对于臂套21沿箭头所示运动,并带动悬挂件 3运动。如图17所示,直至悬挂件3上挂设的物体运动至指定位置,其中,指定位置为位于机架1内,或位于机架1的另一边。
92.虽然本实用新型披露如上,但本实用新型并非限定于此。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与修改,因此本实用新型的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1