一种压力与机械耦合式雾化喷嘴及其控制方法与流程
[0001]
本发明涉及压力雾化喷嘴技术领域,尤其涉及一种旋流式压力雾化喷嘴和一种压力与机械耦合式雾化喷嘴旋流控制方法。
背景技术:
[0002]
随着常规能源(石油、煤炭、天然气)可开采量日益减少,燃用劣质燃油甚至废液已被许多企业作为节约能源的重要方法。对于这种液体燃料,影响其燃烧效率的一个重要因素就是雾化效果,液体的雾化过程主要依靠喷雾喷头实现,通过对液体施以高压或者高速气体等外附加条件促使液体破碎成直径更小的雾滴颗粒,从而实现其所需用途。
[0003]
喷嘴技术是一种充满生机的实用技术,一般的热动力装置,民用燃烧设备上均利用到喷嘴,喷嘴的性能优劣直接影响到点火、燃烧稳定性、温度分布等各方面的性能,喷嘴性能的改进,与直接相关的工业生产的效果很有影响。
[0004]
喷嘴的性能优劣直接影响到点火、燃烧稳定性、温度分布等各方面性能,因此,通过改进喷雾喷头的结构,以改进喷头的雾化效果是研究的重点。
技术实现要素:
[0005]
本发明提供了一种压力与机械耦合式雾化喷嘴,旋流片能够在流体通道内旋转,能够使流体液柱绕环形容置腔旋转的同时增加旋流片的旋转角度,获得更好的流体旋度,以改善雾化扩散角度和扩散长度。
[0006]
本发明还有一个目的是提供一种压力与机械耦合式雾化喷嘴旋流控制方法,能够根据流体压力,调节旋流片的转速,以精准控制雾化效果。
[0007]
本发明提供的技术方案为:
[0008]
一种压力与机械耦合式雾化喷嘴,包括:
[0009]
管接头;
[0010]
出液端口,其可拆卸设置在所述管接头一端,并与所述管接头形成流体通道;
[0011]
旋流片,其可旋转支撑在所述流体通道内;
[0012]
雾化片,其可拆卸设置在所述流体通道内,位于所述旋流片一侧,并与所述旋流片构成旋流雾化腔;
[0013]
其中,流体能够经过所述旋流片进入所述旋流雾化腔内形成旋流液柱,并经所述雾化片将所述旋流液柱破碎为液化雾滴。
[0014]
优选的是,所述旋流片为柱形,且一端具有柱形槽。
[0015]
优选的是,还包括柱形凸台,其设置在所述柱形槽内,并与所述柱形槽形成环形旋流容置腔。
[0016]
优选的是,所述旋流片具有周向分布的多个进液通道,所述进液通道与所述环形容置腔切向连通。
[0017]
优选的是,还包括:
[0018]
旋转连接柱,其一端连接所述旋流片;
[0019]
卡接环,其通过连接筋与所述旋转连接柱另一端一体连接,并具有环形凹槽,能够套设在所述管接头,并能绕所述管接头旋转。
[0020]
优选的是,还包括驱动轮,其设置在所述卡接环一侧,并与所述卡接环的外齿啮合,能够驱动所述卡接环旋转。
[0021]
优选的是,所述雾化片包括:
[0022]
雾化片本体,其为柱形;
[0023]
雾化腔,其为喇叭型贯通腔,位于所述雾化片本体中心,所述雾化腔与所述旋流容置腔连通。
[0024]
优选的是,还包括分液器,其设置在所述旋流片另一侧,所述分液器具有多个沿轴向分布的贯通孔,能够将进入所述管接头内的流体分流为多个沿轴向分布的液柱。
[0025]
一种压力与机械耦合式雾化喷嘴旋流控制方法,包括:
[0026]
步骤一、以管接头内通入流体的压力、旋流片的旋度系数作为变量,获取多组变量的样本点作为输入层向量;
[0027]
步骤二、得到所述多组变量的样本点所对应的旋流片转速,并将其作为输出层向量;
[0028]
步骤三、根据输入层向量和对应的输出层向量建立三层bp神经网络模型,并进行训练,对旋流片转速进行控制,优化雾化喷嘴的雾化扩散性能,其中所述雾化扩散性能包括:雾化喷嘴的扩散长度和雾化喷嘴的扩散角度;
[0029]
其中,设置隐层神经元数为10,最大训练次数为1000,学习速率为0.01,训练精度为0.001,动量因子为0.9。
[0030]
优选的是,所述旋流片的旋度系数经验公式为:
[0031][0032]
其中,s
δ
为旋度系数,中,h
bos
为柱形凸台的高度,h
z
为雾化片喇叭型贯通腔深度,h
j
为环形旋流腔片深度,r
bos
为凸台截面半径,r
cav
为柱形槽半径,b
en
进液通道宽度,l
en
为进液通道长度。
[0033]
有益效果
[0034]
本发明提供了一种压力与机械耦合式雾化喷嘴,旋流片能够在流体通道内旋转,能够使流体液柱绕环形容置腔旋转的同时增加旋流片的旋转角度,获得更好的流体旋度,以改善雾化扩散角度和扩散长度。
[0035]
本发明还提供一种压力与机械耦合式雾化喷嘴旋流控制方法,能够根据流体压力,调节旋流片的转速,以精准控制雾化效果。
附图说明
[0036]
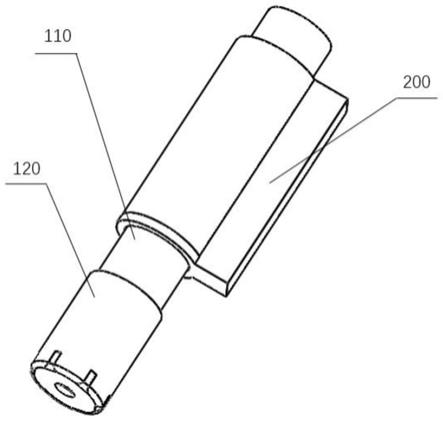
图1为本发明所述的压力与机械耦合式雾化喷嘴的结构示意图。
[0037]
图2为本发明所述的压力与机械耦合式雾化喷嘴的内部结构示意图。
[0038]
图3为本发明所述的旋流片的结构示意图。
[0039]
图4为本发明所述的旋流片的截面图。
[0040]
图5为本发明所述的旋流片驱动装置的结构示意图。
[0041]
图6为本发明所述的雾化片的结构示意图。
[0042]
图7为本发明所述的雾化片的截面图。
[0043]
图8为本发明所述的分液器的结构示意图
具体实施方式
[0044]
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
需要说明的是,在本发明的描述中,术语“中”、“上”、“下”、“横”、“内”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0046]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0047]
如图1-2所示,基于背景技术提出的技术问题,本发明提供了一种压力与机械耦合式雾化喷嘴,包括:包括:管接头110、出液端口120、旋流片130和雾化片140。
[0048]
其中,管接头110为柱形管,能够与流体管道连通,出液端口120可拆卸设置在管接头110一端,并与管接头形成流体通道,在实际应用时,流体管道内充灌压力流体,经过管接头110进入流体通道内,并经过出液端口120流出。管接头120与出液端口120采用可拆卸的连接方式,方便更换管接头120内部件。在另一实施例中,出液端口120与管接头110螺纹连接。
[0049]
旋流片130可旋转支撑在流体通道内;雾化片140可拆卸设置在所述流体通道内,位于旋流片一侧,并与旋流片130构成旋流雾化腔;其中,流体能够经过旋流片130进入旋流雾化腔内形成旋流液柱,并经雾化片140将旋流液柱破碎为液化雾滴,旋流片130和雾化片140均采用可拆式设计,可根据流体不同更换旋流片130和雾化片140,以获得更好的雾化效果。旋流片能够在流体通道内旋转,能够使流体液柱绕环形容置腔旋转的同时增加旋流片的旋转角度,获得更好的流体旋度,以改善雾化扩散角度和扩散长度。
[0050]
如图3所示,旋流片130为柱形,且一端具有柱形槽,旋流片具有周向分布的多个进液通道132,压力流体经进液通道132分流成多个液柱,在压力作用下绕柱形槽旋转。
[0051]
在另一实施例中,柱形槽中心设置有柱形凸台133,柱形凸台133与柱形槽形成环形旋流容置腔134,压力流体经进液通道132分流成多个液柱,在压力作用下绕柱形槽旋转,
中心设置柱形凸台133可使液柱绕环形容置腔134旋转,具有更好的流体旋度,改善雾化效果。
[0052]
如图4所示,进液通道132与环形容置腔切向连通,流体沿切向进入旋流容置腔,能够使流体从切向入口进入后旋流室后能贴紧旋流室壁面做旋转运动,从而增加旋流度,保证喷射粘度较大的流体时仍有较大的雾化角。
[0053]
如图5所示,旋流片130的一侧具有旋转连接柱135,端与旋转连接柱135通过连接筋137连通;卡接环138与旋转套筒136另一端一体连接,具有环形凹槽138a,并能够套设述旋转套筒136另一端,绕旋转套筒136旋转。
[0054]
作为一种优选,驱动轮139,设置在卡接环138一侧,并具有外齿,且与卡接环138的外齿啮合,能够驱动卡接环138旋转。
[0055]
在另一实施例中,驱动轮139由电机200驱动旋转。
[0056]
如图6-7所示,雾化片140包括:雾化片本体141和雾化腔142,雾化片本体141为柱形;雾化腔142为喇叭型贯通腔,位于雾化片本体141中心,雾化腔142与旋流容置腔134连通。雾化腔142为喇叭型使得旋流室中心压力降低,形成更大的空气芯,从而增加了卷吸作用,使得燃料与氧化剂更充分的混合。在常规应用中,雾化片140的雾化腔142为锥形结构,本申请采用喇叭型贯通腔后明显改进了雾化效果,雾化后的液滴更细,分布更均匀,液液滴大小更均匀。
[0057]
如图8所示,在另一实施例中,分液器150设置在旋流片130另一侧,分液器150具有多个沿轴向分布的贯通孔151,能够将进入管接头110内的流体分流为多个沿轴向分布的液柱,作为一种优选,贯通孔151与分液器150之间具有旋向角度。
[0058]
由于,旋流片转速受制于流体压力、粘度和喷嘴内雾化结构参数等因素,因此各因素的作用机制不能用精确的数学语言来准确描述,因此旋流片的转速设定属于复杂的非线性系统问题,因此本发明还提供了一种压力与机械耦合式雾化喷嘴旋流控制方法,利用神经网络训练模型完成旋流片转速的设定。
[0059]
一种压力与机械耦合式雾化喷嘴旋流控制方法,包括:
[0060]
步骤一、建立神经网络模型
[0061]
bp神经网络模型是基于大量样本点逐步挖掘已知输入与输出之间的潜在关系,本发明通过仿真为神经网络模型的建立提供样本数据。以管接头内通入流体的压力、流体粘稠度、旋流片的旋度系数作为变量,获取多组变量的样本点作为输入层向量;
[0062]
影响雾化喷嘴雾化扩散性能的参数较多,综合考虑雾化喷嘴的雾化性能,流体压力选取0.5mpa、1.0mpa、1.5mpa、2.0mp范围a四种,流体粘稠度的影响比较大,因此粘稠度的选取范围为0.2-1000,并选取2.3、23、45、72、65、125、180、200八种粘稠度。旋流片的旋度系数经验公式为:
[0063][0064]
其中,s
δ
为旋度系数,中,h
bos
为柱形凸台的高度,h
z
为雾化片喇叭型贯通腔深度,h
j
为环形旋流腔片深度,r
bos
为凸台截面半径,r
cav
为柱形槽半径,b
en
进液通道宽度,l
en
为进液
通道长度。
[0065]
为得到足够多的样本点,对以上变量进行了全实验设计,共160种旋流片转速设定值。为评判模型的预测效果,训练时样本通常会被分为训练样本和预测样本两个部分,鉴于目前通常采用试凑法进行样本数量的选取,根据经验,在160组仿真数据中随机选择了120组作为训练样本,40组作为预测样本。
[0066]
步骤二、进行bp神经网络训练。
[0067]
鉴于本发明研究的bp神经网络模型旨在实现旋流片转速的预测控制,在模型训练过程中,网络层数及各层神经元个数的确定对训练效果影响较大,已有研究成果表明:隐层神经元个数与网络层数相辅相成,即充足的神经元个数能够保证仅有一个隐层的三层前向网络对闭区间内的连续函数具有较好的逼近效果,而且由于误差传递环节与网络层数成正比,采用多层神经网络模型容易降低其泛化性能,因此选用三层bp网络结构,输入层神经元数为3,输出层为1,隐层为10,最终的参数设置如表1所示:
[0068]
表1bp神经网络参数设置对照表
[0069][0070]
在训练过程中通过不断调整权值与阈值提升模型的预测精度,直至系统误差小于等于期望误差时,完成神经网络的训练过程,并将最终训练结果转换为模块,模型由输入模块、bp神经网络模型、旋流片转速转换模块、输出模块四部分组成,输入模块包括管接头内通入流体的压力、流体粘稠度、旋流片的旋度系数三个变量。由于在神经网络模型中对旋流片转速进行了等效替代,因此在预测模型中加入了转速转换,从而实现了格栅开度的有效输出。
[0071]
雾化喷嘴扩散长度和雾化喷嘴的扩散角度由外特性时间测得,其中,喷嘴雾化扩散长度与旋流片转速的对应计算结果如表2所示:
[0072]
表2喷嘴雾化扩散长度与旋流片转速的对应计算结果表
[0073][0074][0075]
其中,喷嘴雾化扩散角度与旋流片转速的对应计算结果如表3所示:
[0076]
表3喷嘴雾化扩散角度与旋流片转速的对应计算结果表
[0077][0078]
为验证预测模型的准确性,本发明选取了四种转速模型进行了对比实验,并将计
算值与实验结果及其误差进行对比分析,如表4所示,四种模型,计算值与实验值较为接近。
[0079]
表4误差分析表
[0080][0081]
最大误差绝对值为5.3%,仍在工程允许误差范围内,因此计算模型满足精度要求。
[0082]
本发明提供了一种压力与机械耦合式雾化喷嘴,旋流片能够在流体通道内旋转,能够使流体液柱绕环形容置腔旋转的同时增加旋流片的旋转角度,获得更好的流体旋度,以改善雾化扩散角度和扩散长度。
[0083]
本发明还提供一种压力与机械耦合式雾化喷嘴旋流控制方法,能够根据流体压力,调节旋流片的转速,以精准控制雾化效果。
[0084]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1