热泵装置、空调机以及制冷机的制作方法
1.本发明涉及具有压缩机的热泵装置、空调机以及制冷机。
背景技术:
2.以往,在空调机等中,若在压缩机的运转停止时制冷剂的温度降低,则产生制冷剂积存于热容量较大的压缩机的内部的所谓的制冷剂滞留。作为消除制冷剂滞留且顺畅地发挥制冷剂的润滑作用的方法,研究了各种方法。例如,专利文献1公开了在制热时的运转停止中向压缩机供给高频的低电压的方法。另外在专利文献1中,通过在高频的载波中也成为低频的10khz以下的多个频率的载波的合成,而使载波的合成频率降低至听不见的范围,从而减少由高频载波引起的逆变器的损耗,实现兼顾低功率化和压缩机电磁音的低噪声化。
3.专利文献1:国际公开第2012/172684号
4.然而,在专利文献1中即使将载波的合成频率低频化,也是高频的载波,因此作为电噪声,高频成分的峰值成为课题。另外,在专利文献1中存在产生瞬间的输出功率的变化的问题。瞬间的输出功率的变化容易产生瞬间的噪声的峰值。
技术实现要素:
5.本发明是鉴于上述情况所做出的,目的在于得到一种能够抑制瞬间的输出功率的变化以及电噪声的热泵装置。
6.为了解决上述的问题并实现目的,本发明的热泵装置具备:压缩机构,其压缩制冷剂;马达,其使压缩机构驱动;逆变器,其对马达施加电压;以及逆变器控制部,其基于载波信号,生成使逆变器驱动的驱动信号,逆变器控制部在加热制冷剂的加热运转模式中,使载波信号的载波频率周期性地变化并且生成驱动信号,使得对马达施加实矢量的电压的时间不依赖于变化的载波频率而是成为恒定。
7.本发明的热泵装置发挥能够抑制瞬间的输出功率的变化以及电噪声的效果。
附图说明
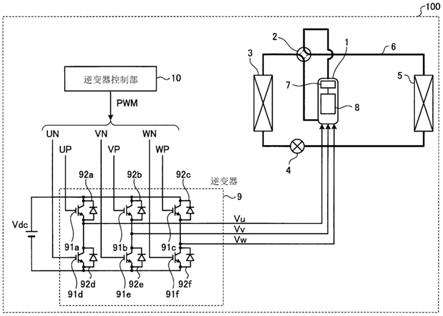
8.图1是表示实施方式1的热泵装置的构成例的图。
9.图2是表示实施方式1的控制电路的图。
10.图3是表示实施方式1的逆变器控制部的图。
11.图4是表示将实施方式1的频率设为fc的载波、电压指令值以及驱动信号的关系的图。
12.图5是说明图4所示的电压矢量的变化的说明图。
13.图6是表示使实施方式1的电压矢量随时间的经过而变化的情况下的施加电压的图。
14.图7是表示在使实施方式1的载波可变时,交替地输出v4矢量以及v3矢量时的动作的图。
15.图8是表示在使实施方式1的载波可变时,交替地输出v4矢量以及v3矢量时的动作的另外的图。
16.图9是表示实施方式1的调制频率的图。
17.图10是表示实施方式3的基准相位θf为0
°
、120
°
以及240
°
时的马达的uvw的各相中流动的电流的图。
18.图11是表示实施方式3的热泵装置的一部分的图。
19.图12是表示实施方式3的电压计算部的动作的流程图。
具体实施方式
20.以下,基于附图对本发明的实施方式的热泵装置、空调机以及制冷机进行详细地说明。另外,并非通过该实施方式来限定本发明。
21.实施方式1.
22.图1是表示实施方式1的热泵装置100的构成例的图。热泵装置100具备压缩机1、四通阀2、热交换器3、膨胀机构4、热交换器5、逆变器9以及逆变器控制部10。构成压缩机1、四通阀2、热交换器3、膨胀机构4、热交换器5经由制冷剂配管6而依次连接的制冷循环。压缩机1具备:压缩制冷剂的压缩机构7、和使压缩机构7动作的马达8。马达8是具有u相、v相以及w相的三相的绕组的三相马达。在空调机、制冷机等中具备热泵装置100。
23.逆变器9通过对马达8施加电压而使其驱动。另外,逆变器9与马达8电连接。逆变器9分别对马达8的u相、v相、w相的绕组施加电压vu、vv、vw。
24.逆变器控制部10生成pwm(pulse width modulation)信号而使逆变器9驱动。pwm信号也称为驱动信号。逆变器9与逆变器控制部10电连接。
25.逆变器9具备开关元件91a~91f和环流二极管92a~92f。逆变器9将供给的母线电压vdc转换为三相交流电压亦即电压vu、vv、vw,并分别向马达8的u相、v相、w相的绕组施加。另外,在逆变器9中,串联连接的两个开关元件91a和91d、91b和91e、以及91c和91f三个并联连接。环流二极管92a~92f与开关元件91a~91f分别并联连接。通过从逆变器控制部10发送的pwm信号up、vp、wp、un、vn以及wn,逆变器9驱动各对应的开关元件,由此产生三相的电压vu、vv、vw,分别向马达8的u相、v相、w相的绕组施加。pwm信号up使开关元件91a驱动。pwm信号vp使开关元件91b驱动。pwm信号wp使开关元件91c驱动。pwm信号un使开关元件91d驱动。pwm信号vn使开关元件91e驱动。pwm信号wn使开关元件91f驱动。
26.逆变器控制部10在通常的运转模式时生成并输出pwm信号up、vp、wp、un、vn、wn,以便对马达8进行旋转驱动。另外,逆变器控制部10在使压缩机1加热的加热运转模式时,通过流过马达8无法追随的高频电流,由此不使马达8旋转驱动,而是进行压缩机1的加热。在加热运转模式时,通过使滞留在压缩机1的液体制冷剂加热气化,从而压缩机1进行制冷剂的排出。逆变器控制部10基于外部空气温度以及压缩机1的温度,进行滞留在压缩机1内的液体制冷剂量的推定,在制冷剂滞留的情况下向加热运转模式转移。逆变器控制部10保持表示热泵装置100的运转模式的状态的信息。表示运转模式的状态的信息表示通常的运转模式或加热运转模式的状态中的任一个的信息。
27.逆变器控制部10例如为微型计算机,通过进行各处理的电子电路亦即处理电路来实现。本处理电路可以是专用的硬件,也可以是具备存储器以及执行储存于存储器中的程
序的cpu(central processing unit,中央运算装置)的控制电路。在此,存储器例如对应于ram(random access memory,随机存取存储器)、rom(read only memory,只读存储器)、闪存等非易失性或易失性的半导体存储器、磁盘、光盘等。图2是表示实施方式1的控制电路的图。在本处理电路是具备cpu的控制电路的情况下,该控制电路例如成为图2所示的构成的控制电路400。
28.如图2所示,控制电路400具备cpu亦即处理器400a、和存储器400b。在通过图2所示的控制电路400来实现的情况下,通过处理器400a读取并执行存储于存储器400b的与各处理对应的程序来实现。另外,存储器400b也作为处理器400a实施的各处理中的临时存储器来使用。
29.以下,对本发明中的压缩机的加热方法亦即使高频电流高效地在马达中流动的控制方法进行说明。图3是表示实施方式1的逆变器控制部10的图。逆变器控制部10具备加热指令部11、高频通电部12以及驱动信号生成部13。高频通电部12通过加热指令部11接收所需的加热量的信号,生成用于生成高频交流电压的高频电压指令值v*和高频相位指令θ,并向驱动信号生成部13输出信号。驱动信号生成部13具备电压指令生成部14和pwm信号生成部15。高频电压指令值v*和高频相位指令θ被输入到电压指令生成部14。另外,电压指令生成部14生成电压指令值vu*、vv*、vw*,并向pwm信号生成部15输出。pwm信号生成部15接收电压指令值,生成pwm信号,输出使逆变器9驱动的驱动信号up、vp、wp、un、vn以及wn,由此使逆变器9驱动。
30.图4是表示将实施方式1的将频率设为fc的载波、电压指令值以及驱动信号的关系的图。另外,图4是表示将v*设为任意的值,将高频通电部12的输出设为0
°
的情况下的动作的图。高频相位指令θ在载波信号的波峰或波谷的时刻被切换为0
°
和180
°
,从而pwm信号生成部15能够输出与载波信号同步的pwm信号。该动作是交替地切换为相对于基准相位具有0
°
的相位差的电压、和相对于基准相位具有180
°
的相位差的电压的动作。此时,电压矢量按照v0(up=vp=wp=0)、v4(up=1、vp=wp=0)、v7(up=vp=wp=1)、v3(up=0、vp=wp=1)、v0(up=vp=wp=0)、
···
的顺序变化。pwm信号生成部15对电压指令值vu*、vv*、vw*和预先决定的频率的载波信号进行比较,并基于相互的大小关系生成pwm信号up、vp、wp、un、vn以及wn。预先决定的频率的载波信号也称为基准信号。另外,虽然在图4中省略,但pwm信号un、pwm信号vn、pwm信号wn分别取与pwm信号up、pwm信号vp、pwm信号wp正反相反的值。
31.图5是说明图4所示的电压矢量的变化的图。在图5所示的图中,示出用虚线包围的开关元件为导通,除此以外的开关元件为断开的情况。另外,表示电压矢量的变化顺序的粗箭头的旋转方向(电压矢量v0
→
v4
→
v7
→
v3
→
v0
…
的旋转方向)对应于图4的例子,也可以将电压矢量的变化顺序设为相反方向的顺序。
32.如图5所示,在施加v0矢量、v7矢量时,马达8的线间成为短路状态,并不输出电压。在该情况下,马达8的电感所蓄积的能量成为电流而在短路电路中流动。另外,在施加v4矢量时,经由u相向马达8流入,并经由v相以及w相从马达8流出的u相方向的电流(+iu的电流)流动,在施加v3矢量时,经由v相以及w相向马达8流入,并经由u相从马达8流出的-u相方向的电流(-iu的电流)在马达8的绕组中流动。即,在施加v4矢量时和施加v3矢量时,相反方向的电流在马达8的绕组中流动。另外,由于电压矢量按照v0、v4、v7、v3、v0、
···
的顺序
变化,因此+iu的电流与-iu的电流交替地在马达8的绕组中流动。特别是如图4所示,v4矢量和v3矢量出现在1个载波周期(1/fc)之间,因此逆变器9能够对马达8的绕组施加与载波频率fc同步的交流电压。
33.通过以比压缩机1的压缩动作时的运转频率高的频率交替地输出v4矢量和v3矢量,从而使转矩正反切换,因而抵消转矩。因此能够抑制马达的振动。另外,若逆变器9施加的高频电压的频率为14khz以上,则马达8的铁心的振动音大致为可听范围外,因此对噪声的降低很有效。例如,在用于逆变器9的元件的特性上,可使用的开关的频率多为20khz。因此,通过使用开关频率为14khz~20khz,即14khz~20khz的载波频率,使马达8的铁心的振动音成为可听范围外,能够进行低噪声的加热。另外,因施加高频电压而产生的高频引起电感分量变大,绕组阻抗升高,因此在绕组中流动的电流变小,铜损减少,但相应地通过施加高频电压而产生铁损,能够有效地进行加热。此外由于在绕组中流动的电流较小,因而逆变器9的损耗也变小。因此能够进一步减少损耗地进行加热。另外,在压缩机1为磁铁埋入型马达的情况下,由于高频磁通交链的转子表面也成为发热部,因而实现制冷剂接触面增加以及对压缩机构7的迅速的加热,因此能够进行高效的制冷剂的加热。
34.此外,通过从交替地输出v4矢量和v3矢量的动作开始,经过任意的时间并且使电压矢量方向各偏移任意的角度,从而能够消除加热的不均匀。图6是表示使实施方式1的电压矢量随着时间的经过而变化的情况下施加电压的图。例如,如图6所示针对v4矢量、v3矢量、之后是v2矢量、v5矢量、接着是v1矢量、v6矢量,使正反交替地输出的电压矢量各偏移120
°
。偏移电压矢量的理由是为了防止在马达8为埋入磁铁型马达的情况下,由于绕组的阻抗根据转子位置而变化、电流根据转子位置而变化、以及向马达输入的功率根据转子位置而变化,从而产生加热不均匀。另外,虽然在图6中示出了使电压矢量每隔任意的时间各偏移120
°
的例子,但当然即使各便宜60
°
偏移也能够得到同等的效果,也可以根据任意的时间设为120
°
、60
°
以外的角度。
35.通过以上说明的逆变器控制部10的控制,通过施加高频的电压,能够以低噪声且低功率来进行高效率的压缩机1的加热。然而,若使用该控制,则电噪声成为问题。作为空调机或制冷机中的噪声的标准,例如需要遵守电气用品安全法、或欧洲的en55014-1之类的标准。与此相对,在emc(electro-magnetic compatibility,电磁兼容)的发射中,在该加热控制中,使用高频载波,施加与其同步的高频电压,因此有时在载波的整数倍的频率下出现噪声较大的峰值。在emc的发射中,针对每个标准各频率成分的噪声量的大小,将准峰值检波(qp:quasi-peak detection)和平均值检波(av:average detection)决定为限度值,若特定的频率成分中具有噪声的峰值,则存在不满足emc标准的问题。另外,若噪声的峰值出现的频率变多时,准峰值检波存在升高的趋势。
36.与此相对,通过使载波频率从恒定的频率变为周期性地可变,能够从出现多个较大的峰值的噪声特性,变为使峰值分散到多个频率而平滑化。以下,对周期性地变更载波频率的方法进行说明。
37.图7是表示在使实施方式1的载波可变时,交替地输出v4矢量以及v3矢量时的动作的图。图7示出有使载波频率从f
c1
变化为f
c2
、f
c3
、f
c4
,并缩短载波周期时的情况。将载波频率设为f
c1
的载波、将载波频率设为f
c2
的载波、将载波频率设为f
c3
的载波、以及将载波频率设为f
c4
的载波各自的斜率相同,且振幅按照f
c1
、f
c2
、f
c3
、f
c4
的顺序而变小。此外,在图7中,虽
然是在载波的波谷切换为下一个频率之类的形式,但也可以在载波的波峰切换频率。从f
c1
至f
c2
、f
c3
、f
c4
、
…
的切换例如若是由一般的微型计算机进行的逆变器控制,则能够通过内部的pwm定时器的输出使斜率恒定。因此,可以用比载波的振幅慢的频率的周期函数对载波进行调制。周期函数可以是正弦波、三角波及其他合成波。
38.或者,也可以在预先准备可变的范围内的多个频率、或可设定的多个频率的表,并通过反复进行依次设定为表中记载的多个频率,来切换频率。例如,表是按照设定多个频率的顺序记载的表。或者,也可以通过载波的波峰来决定下一个频率,进行从载波的波谷切换到下一个频率这样的使频率可变的控制。此时,也可以使用随机数等使频率的值随机的方法。但是,从电噪声的观点出发,与使频率随机的方法相比,通过周期函数的调制进行的可变控制更容易使噪声的峰值平滑化。另外,通过不改变载波振幅而改变载波的斜率之类的方法,也能够使频率可变。
39.但是在图7的方法中,由于载波的振幅变化,因此电压指令值与载波的交点的相位发生变化,存在从想要可变的载波频率产生偏差的问题。由于上述问题,尽管实现了噪声的峰值的分散,但却出现了另外的峰值,从实现emc发射的改善的观点出发并不优选。
40.另外,若载波的振幅变小时,则使载波频率向变高的方向上变化的可能性变小。另外,如图7的载波频率被设定f
c4
时的v0矢量那样,迁移时间变短,因此能够可变的频率范围变窄。
41.即使在实施了不改变载波振幅而改变载波的斜率的方法中的使频率可变的控制的情况下,由于构成载波的时钟频率和计数器输出的比特数有限,因此若提高载波频率,则能够可变的频率值减小,能够可变的频率范围也变窄。
42.图8是表示在使实施方式1的载波可变时,交替地输出v4矢量以及v3矢量时的动作的另外的图。在本实施方式中如图8所记载的那样,特征在于,每当使载波的周期变化,使载波振幅的中心值随着载波振幅的变化而变化,通过针对每个载波频率,将载波振幅的中心值设为正反相反的电压指令值的基准,从而高精度、并且使载波频率在较宽的范围内细微可变。在图8中将载波振幅的中心值记载为50%。另外在图7的方法中,不管周期如何,载波的振幅的中心值为恒定,因此若载波频率变高则载波的振幅变小,与图8的方法相比,能够提高载波频率的范围变窄。
43.另外,如图8那样,通过将载波振幅的中心值作为正反相反的电压指令值的基准,并设置电压指令值|v*|使偏离中心值的值在各载波间恒定,能够将实矢量的电压的施加时间恒定。此外在图8中,实矢量为v4矢量和v3矢量。电流值取决于电压施加时间,因此施加到马达8的电压的高频的频率、以及载波频率可变,即使在施加了不同的频率的电压的情况下,也能够不管频率如何,使马达8的绕组中流动的电流值恒定。因此,在变更载波频率时产生的瞬间施加到压缩机的功率稳定。由此,例如相对于电气用品安全法等所规定的加热时的最大功率50w,在以接近50w的功率设计时,也能够进行容易具有可能性的设计,起到缩短加热时间的效果。另外,电噪声量的大小存在若功率增加则伴随增加的功率而变大的趋势。因此根据本发明,通过一边分散噪声的峰值出现的频率,一边减少瞬间施加到压缩机的功率的峰值,能够减少准峰值检波。
44.另外,通过用比载波频率慢的频率的周期函数对上述载波频率可变的频率进行调制,能够使载波频率的变化平衡良好地分配在所希望的频率宽度,能够使瞬间的功率更稳
定化。图9是表示实施方式1的调制频率的图。图9是以16khz为中心在14khz~18khz的范围内使载波频率可变,以成为500hz(周期2ms)的正弦波的方式使载波频率变化时的例子。在图9中,纵轴表示载波频率,横轴表示时间。另外,设为可变的频率宽度并不限定于14khz~18khz。另外,根据所使用的马达8、或逆变器9的组合引起的噪声特性的不同来调整调制的频率,通过控制参数的调整,即使不依赖基于铁氧体磁芯等硬件部件的噪声对策,也能够采取噪声对策。
45.实施方式2.
46.在实施方式1中,对在基于高频的电压的施加以及载波频率的可变控制进行的压缩机1的加热控制中,载波可变时的电压矢量为v4、v3的情况进行了说明。本实施方式的热泵装置100也可以如图6所示,从实施方式1中的交替地输出v4矢量和v3矢量的动作开始,经过任意的时间并且使电压矢量的方向各偏移任意的角度,针对v4、v3,之后是v2、v5、接着v1、v6,使正反交替地输出的电压矢量各偏移120,由此进行消除加热不均匀的控制。另外,即使进行各60偏移的控制,当然也能够得到同等的效果。
47.实施方式3.
48.图10是表示实施方式3的基准相位θf为0
°
、120
°
以及240
°
时的马达8的uvw的各相中流动的电流的图。在实施方式2中,在将向马达8交替地施加v4矢量和v3矢量时的电压矢量的方向设为基准相位为0
°
的情况下,进行了将电压矢量的方向偏移为120
°
、240
°
的控制。在使电压矢量的方向偏移的情况下,如图10所示,有时在uvw相中流动的电流改变。在该情况下,如上述那样,通过将电压矢量施加的方向在经过任意的时间后切换为120
°
、240
°
,电噪声也发生变化。
49.图11是表示实施方式3的热泵装置100a的一部分的图。在图11中,仅对逆变器9和马达8周边进行图示。热泵装置100a在热泵装置100的构成的基础上,还具备电流检测电路20、电压监视电路21、主电路电容器22以及电压计算部23。电流检测电路20设置在逆变器9与马达8之间。主电路电容器22是逆变器的电压的供给源。电压监视电路21监视主电路电容器22的母线电压vdc。电压计算部23保存电流检测电路20检测的电流值,并计算电压矢量的施加时间或电压指令值,使得在各电压矢量时流动的电流相等。
50.在加热运转模式开始时,若基准相位为0
°
,则逆变器9将v4矢量、v3矢量中的任一方或双方施加到马达8。电流检测电路20检测在马达8的绕组u相中流动的电流。接下来,逆变器9将从基准相位偏移了120
°
的电压矢量施加到马达8。电流检测电路20检测在v相中流动的电流。接下来,逆变器9将从基准相位偏移了240
°
的电压矢量施加到马达8。电流检测电路20检测在w相中流动的电流。电流检测电路20检测到的电流值由电压计算部23保存。另外,电压计算部23以基准相位为0
°
,基准相位为120
°
,基准相位为240
°
时流动到的电流相等的方式计算在各状态下的实电压矢量施加时间或电压指令值|v*|。
51.在将母线电压设为vdc,将电压矢量施加时间设为δt,将从基准相位起0
°
时的电流设为δiu,将电感设为lu,将从基准相位起120
°
时的电流设为δiv,将电感设为lv,将从基准相位起240
°
时的电流设为iw,将电感设为lw时,则lu能够用公式(1)表示。
52.lu=vdc
·
δt/δlu
···
(1)
53.另外,各相位时的电流路径的电感值的关系成为公式(2)的关系。
54.lu
·
δiu=lv
·
δiv=lw
·
δiw
···
(2)
55.电压计算部23通过使用公式(2),能够计算电压矢量的各相位时,电流值成为相等的实电压矢量的施加时间、在各相位间的施加时间的关系。
56.例如,在将若基准相位为0
°
时,则交替地施加v4矢量和v3矢量时的电压矢量施加时间作为基准的情况下,若将0
°
时的施加时间设为δtu,将120
°
时的施加时间设为δtv,将240
°
时的施加时间设为δtw,则120
°
、240
°
时的施加时间成为公式(3)以及公式(4)。
57.δtv=(lu/lv)
·
δtu
···
(3)
58.δtw=(lu/lv)
·
δtu
···
(4)
59.根据公式(2)、(3)、(4),电压计算部23能够求出经过任意时间后不管电压矢量的相位如何而将逆变器的输出电流设为恒定的,各相位中的实电压矢量的施加时间。将从基准相位起0
°
时的实电压矢量施加时间的δtu设为恒定来实施载波频率的可变控制,在经过任意时间后在120
°
时,将公式(3)的δtv设为恒定,来实施载波频率可变控制,另外,在经过任意时间后在240
°
时,将公式(4)的δtw设为恒定,来实施载波频率可变控制。
60.图12是表示实施方式3的电压计算部23的动作的流程图。电压计算部23确认逆变器控制部10所保持的运转模式的信息,热泵装置100a是否处于加热运转模式(步骤s1)。在处于加热运转模式的情况下(步骤s1,是),电压计算部23将电压矢量各偏移120
°
并检测各相的电流值,对每个相计算在各相中电流相等的电压矢量施加时间(步骤s2)。在不处于加热运转模式的情况下(步骤s1,否),处理返回到步骤s1。电压计算部23在基准相位0
°
下以任意时间实施在步骤s2中求出的施加时间恒定、且载波频率可变的基于高频电压的加热运转(步骤s3)。电压计算部23确认逆变器控制部10所保持的运转模式的信息,是否处于加热运转模式(步骤s4)。在是加热运转模式的情况下(步骤s4,是),电压计算部23在基准相位120
°
下以任意时间实施在步骤s2中求出的施加时间恒定、且载波频率可变的基于高频电压的加热运转(步骤s5)。在不处于加热运转模式的情况下(步骤s4,否),处理返回到步骤s1。
61.电压计算部23确认逆变器控制部10所保持的运转模式的信息,是否处于加热运转模式(步骤s6)。在处于加热运转模式的情况下(步骤s6,是),电压计算部23在基准相位240
°
下以任意时间实施在步骤s2中求出的施加时间恒定、且载波频率可变的基于高频电压的加热运转(步骤s7)。在不处于加热运转模式的情况下(步骤s6,否),处理返回到步骤s1。电压计算部23确认逆变器控制部10所保持的运转模式的信息,是否处于加热运转模式(步骤s8)。在处于加热运转模式的情况下(步骤s8,是),处理返回到步骤s3。在不处于加热运转模式的情况下(步骤s8,否),处理返回到步骤s1。
62.逆变器输出电流的电流检测电路20在u相、v相、w相3相的情况下、或2相的情况下,都能够检测电流。在2相的情况下,例如在v相中不存在电流检测电路的情况下,在120
°
时v相中流动的电流能够作为u相与w相的电流的总和来求出。另外,在u相中不存在电流检测电路的情况下、和在w相中不存在的情况下也同样。
63.实施方式3与实施方式2同样,从均匀地加热压缩机的观点来看是有效的,但在电噪声特性的观点来看也是有效的。根据电压矢量的相位,若输入压缩机的电流变化,则每次相位切换时,加热时的噪声特性发生变化,但在本实施方式3的发明中,能够均匀地加热压缩机。另外,在实施方式1中说明的基于载波频率的可变控制实现的噪声减少效果的基础上,还能够改善基于高频电压的压缩机加热运转的电噪声特性。当然也可以改善噪声。
64.另外,对于构成逆变器9的开关元件91a~91f和与其并联的环流二极管92a~92f,
现在一般主流是使用以硅(si)为材料的半导体。但是,也可以替代上述材料,而使用以碳化硅(sic)、氮化镓(gan)、或金刚石为材料的宽带隙半导体。另外,在实施方式1、2中,构成逆变器9的开关元件91a~91f、和与其并联的环流二极管92a~92f也可以使用宽带隙半导体。
65.由这样的宽带隙半导体形成的开关元件以及二极管元件的耐电压性较高,容许电流密度也较高。因此,能够使开关元件以及二极管元件小型化,通过使用这些小型化的开关元件以及二极管元件,能够使设置有这些元件的半导体模块,即逆变器9小型化。
66.另外,由这样的宽带隙半导体形成的开关元件以及二极管元件的耐热性也较高。因此,能够使散热器的散热片小型化、以及使水冷部气冷化,因此半导体模块能够进一步小型化。
67.并且,由这样的宽带隙半导体形成的开关元件以及二极管元件的功率损耗较低。因此,能够使开关元件或二极管元件高效率化,进而能够使半导体模块高效率化。
68.另外,由于能够进行高频下的开关,因此能够在马达8中流过更高频的电流,由于通过由马达8的绕组阻抗增加引起的绕组电流减少来减少向逆变器9流动的电流,因此能够得到效率更高的热泵装置。此外,由于高频化变得容易,因此存在容易设定超过可听频率的频率,容易采取噪声对策之类的优点。另外在直流通电中,功率损耗也变小,因此不仅发热变小,即使在流动大电流的情况下,也存在高耐热性能较高,不易产生因发热导致的破坏等优点。
69.此外,在实施方式1至3中,期望开关元件以及二极管元件均由宽带隙半导体形成,但即使任一元件由宽带隙半导体形成,也能够得到该实施例所记载的效果。另外,在实施方式1至3中,此外通过使用作为高效率的开关元件被公知的超结构造的mosfet(金属氧化物半导体场效应晶体管,金属氧化物半导体场效应晶体管),也能够得到同样的效果。
70.以上实施方式所示的构成是表示本发明的内容的一个例子,也可以能够与其它公知的技术组合,也可以在不脱离本发明的主旨的范围内,省略、变更构成的一部分。
71.附图标记说明
72.1...压缩机;2...四通阀;3、5...热交换器;4...膨胀机构;6...制冷剂配管;7...压缩机构;8...马达;9...逆变器;10...逆变器控制部;11...加热指令部;12...高频通电部;13...驱动信号生成部;14...电压指令生成部;15...pwm信号生成部;20...电流检测电路;21...电压监视电路;22...主电路电容器;23...电压计算部;91a~91f...开关元件;92a~92f...环流二极管;100、100a...热泵装置;400...控制电路;400a...处理器;400b...存储器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1