管道清洁装置的制作方法
1.本发明涉及一种管道清洁装置。
背景技术:
2.管道在工业领域和民用领域都有着广泛的应用,管道清洁工作对于维护公众健康和清洁环境十分重要。但是由于管道内部空间狭窄,内部环境曲折复杂而且距离长,用人手进行清洁较为困难,清洁效率低下,一直以来管道清洁都属于技术难题。
3.因此,需要提供一种管道清洁装置,能够在管道内部行走并实现清洁功能,以节省人力并提高管道清洗效率。
技术实现要素:
4.本发明的示例性实施例提供了一种管道清洁装置,包括框架、支撑机构、驱动机构、清洁机构和控制模块。其中支撑机构包括多条弹性伸缩支撑腿,所述支撑腿与框架连接并向框架外侧呈辐射状伸出,所述支撑腿在与管道内表面接触时为框架提供沿管道径向的弹性支撑力,所述弹性支撑力与框架和管道内表面之间的径向距离相对应,从而调整框架在管道内的径向位置。驱动机构包括设置于框架上的第一驱动电机和主动轮,主动轮设置于框架相对两侧,每侧的主动轮由一个第一驱动电机分别驱动,使框架沿管道轴线方向行走。清洁机构包括设置于框架上的第二驱动电机和由第二驱动电机驱动的清洁部件,所述清洁部件用于与管道接触进行清洁操作。控制模块用于输出第一控制信号分别控制每个第一驱动电机的转速和/或转向,以及输出第二控制信号控制第二驱动电机的转速和/或转向,从而实现管道清洁装置在管道内的前进、后退、左转、右转、停止运动,以及管道清洁操作。
5.本发明的示例性实施例还提供了一种管道行走装置,包括框架、支撑机构、驱动机构和控制模块。其中支撑机构包括多条弹性伸缩支撑腿,所述支撑腿与框架连接并向框架外侧呈辐射状伸出,所述支撑腿在与管道内表面接触时为框架提供沿管道径向的弹性支撑力,所述弹性支撑力与框架和管道内表面之间的径向距离相对应,从而调整框架在管道内的径向位置。驱动机构包括设置于框架上的驱动电机和主动轮,主动轮设置于框架相对两侧,每侧的主动轮由一个驱动电机分别驱动,使框架沿管道轴线方向行走。控制模块用于输出第一控制信号分别控制每个驱动电机的转速和/或转向,从而实现管道行走装置在管道内的前进、后退、左转、右转、停止运动。
附图说明
6.图1a示出了根据一个示例性实施例的管道清洗装置的透视图。
7.图1b示出了图1a的管道清洗装置的侧视图。
8.图1c示出了图1a的管道清洁装置的后视图。
9.图1d示出了图1a的管道清洁装置的俯视图。
10.图1e示出了图1a的管道清洁装置的仰视图。
11.图2a示出了根据一个示例性实施例的支撑机构透视图。
12.图2b示出了图2a的支撑机构后视图。
13.图2c示出了图2a的支撑机构侧视图。
14.图3a示出了根据一个示例性实施例的伸缩腿透视图。
15.图3b示出了图3a的伸缩腿侧视图。
16.图3c示出了图3a的伸缩腿俯视图。
17.图4a示出了根据一个示例性实施例的驱动机构透视图。
18.图4b示出了图4a的驱动机构侧视图。
19.图4c示出了图4a的驱动机构后视图。
20.图5a示出了根据一个示例性实施例的清洁机构透视图。
21.图5b示出了图5a的清洁机构侧视图。
22.图5c示出了图5a的清洁机构的后视图。
具体实施方式
23.很多幼儿园、公园、游乐园等场所都设置有筒形滑道供儿童或成人娱乐。这些滑道与用户身体直接接触,因此必须定期清洗、消毒以保证卫生。但是,由于滑道为筒形,其直径通常仅容一人通过,并且整条滑道有较大坡度或包括弧度甚至为螺旋形状,如果用人手进行清洗相当困难且耗时费力。随着科技的发展,人们开始试图利用不同的管道机器人对狭窄的管道进行清洗,但是目前已有的管道机器人大多针对通风、流水管道等进行设计,其结构复杂,操作麻烦,适应性较差,难以直接应用于筒形滑道。
24.示例性实施例提供了一种可以应用于筒形滑道的管道清洁装置,通过在框架上设置多条弹性可伸缩支撑腿自动调整该装置在管道内的径向位置,通过驱动机构驱动框架沿管道轴向行走,同时通过设置在框架上的清洁机构对管道内表面进行清洁操作,从而实现对如筒形滑道等管道的自动化清洁。
25.示例性实施例还提供了一种管道行走装置,通过在框架上设置多条长度可调整的弹性可伸缩支撑腿自动调整该装置在管道内的径向位置,通过驱动机构驱动框架沿管道轴向行走。该管道行走装置可以作为平台,搭载清洁装置、传感装置或其他装置,用于在管道内完成不同任务。
26.示例性实施例提供的管道清洁装置包括框架、支撑机构、驱动机构、清洁机构和控制模块。其中支撑机构包括多条弹性伸缩支撑腿,所述支撑腿与框架连接并向框架外侧呈辐射状伸出,所述支撑腿在与管道内表面接触时为框架提供沿管道径向的弹性支撑力,所述弹性支撑力与框架和管道内表面之间的径向距离相对应,从而调整框架在管道内的径向位置。驱动机构包括设置于框架上的第一驱动电机和主动轮,主动轮设置于框架相对两侧,每侧的主动轮由一个第一驱动电机分别驱动,使框架沿管道轴线方向行走。清洁机构包括设置于框架上的第二驱动电机和由第二驱动电机驱动的清洁部件,所述清洁部件用于与管道接触进行清洁操作。控制模块用于输出第一控制信号分别控制每个第一驱动电机的转速和/或转向,以及输出第二控制信号控制第二驱动电机的转速和/或转向,从而实现管道清洁装置在管道内的前进、后退、左转、右转、停止运动,以及管道清洁操作。
27.在一个实施例中,管道清洁装置还包括传感器,用于测量管道清洁装置在管道内行走的速度,控制模块根据传感器的测量值输出第二控制信号控制第二驱动电机的转速,从而使得清洁部件的转速与管道清洁装置行走的速度相适应。
28.在一个实施例中,弹性伸缩支撑腿包括由弹簧连接的内套筒和外套筒,内套筒设置于外套筒中,内套筒和外套筒之间可以相对平移,其相对平移距离与弹簧的弹性力具有对应关系。
29.在一个实施例中,支撑机构包括两组弹性伸缩支撑腿,所述驱动机构设置于两组支撑腿之间。
30.在一个实施例中,支撑机构还包括两个限位盘,分别固定于框架相对两侧,每个限位盘包括两块同心限位板,支撑腿设置于每个限位盘的两块限位板之间,并从限位板中心伸出限位盘外。
31.在一个实施例中,主动轮平面向框架外侧倾斜一定角度。
32.在一个实施例中,支撑机构中支撑腿长度与管道径向尺寸可调节的匹配。
33.在一个实施例中,清洁机构包括至少一个清洁部件,所述清洁部件第一端连接在第二驱动电机轴上,第二端向第二驱动电机轴周围呈辐射状设置,所述清洁部件在第二驱动电机驱动下旋转时与管道内表面接触以进行清洁操作。
34.在一个实施例中,框架包括设置在底部的多个万向轮,所述万向轮的高度可以调节,用于匹配管道径向尺寸。
35.本发明的示例性实施例还提供了一种管道行走装置,包括框架、支撑机构、驱动机构和控制模块。其中支撑机构包括多条弹性伸缩支撑腿,所述支撑腿与框架连接并向框架外侧呈辐射状伸出,所述支撑腿在与管道内表面接触时为框架提供沿管道径向的弹性支撑力,所述弹性支撑力与框架和管道内表面之间的径向距离相对应,从而调整框架在管道内的径向位置。驱动机构包括设置于框架上的驱动电机和主动轮,主动轮设置于框架相对两侧,每侧的主动轮由一个驱动电机分别驱动,使框架沿管道轴线方向行走。控制模块用于输出第一控制信号分别控制每个驱动电机的转速和/或转向,从而实现管道行走装置在管道内的前进、后退、左转、右转、停止运动。
36.在一个实施例中,弹性伸缩支撑腿包括由弹簧连接的内套筒和外套筒,内套筒设置于外套筒中,内套筒和外套筒之间可以相对平移,其相对平移距离与弹簧的弹性力具有对应关系。
37.在一个实施例中,支撑机构包括两组弹性伸缩支撑腿,所述驱动机构设置于两组支撑腿之间。
38.在一个实施例中,所述支撑机构还包括两个限位盘,分别固定于框架相对两侧,两个限位盘的中心连线与限位盘平面垂直,每个限位盘包括两块同心限位板,支撑腿设置于每个限位盘的两块限位板之间,并从限位板中心伸出限位盘外。
39.在一个实施例中,主动轮平面向框架内侧倾斜一定角度。
40.在一个实施例中,支撑腿和主动轮分别相对于框架对称分布。
41.在一个实施例中,支撑机构中支撑腿长度与管道径向尺寸可调节的匹配。
42.在一个实施例中,框架包括设置在底部的多个万向轮,所述万向轮的高度可以调节,以匹配管道径向尺寸。
43.在一个实施例中,支撑腿与管道内表面接触的部位设有脚轮,所述脚轮为定向被动轮,其方向与主动轮的方向设置为一致。
44.参照本说明书的余下部分和附图可以对本发明的性能和优点作进一步的理解;这些附图中同一个组件的标号相同。在某些情况下,子标记被放在某个标号与连字符后面以表示许多相似组件的其中一个。当提到某个标号但没有特别写明某一个已有的子标记时,就是指所有这些类似的组件。本说明书中使用的“前”、“后”、“左”、“右”仅为方便描述实施例,并非对实施例的限制。
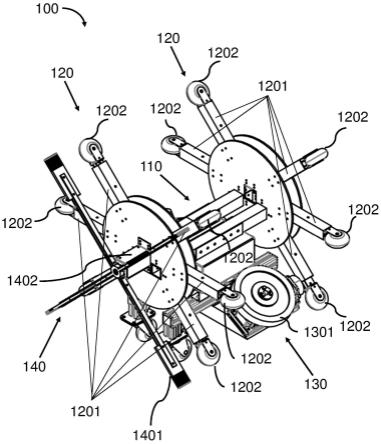
45.图1a示出了根据一个示例性实施例的管道清洁装置100的透视图。图1b、1c、1d、1e分别示出了管道清洁装置100的侧视图、后视图、俯视图和仰视图。图1a-e中,管道清洁装置100包括框架110、支撑机构120、驱动机构130、清洁机构140和控制模块(未示出)。
46.框架110用于支持、安装支撑机构120、驱动机构130、清洁机构140,其底部设有底轮1101,所述底轮1101为万向轮。底轮1101包括前后两组,每组包括两个,分别位于框架110的前部和后部。
47.支撑机构120包括分别设置于框架110前部和后部的两组弹性伸缩支撑腿1201。所述支撑腿1201与框架110连接,并向框架110外侧呈辐射状伸出,其末端设有脚轮1202,所述脚轮1202为定向被动轮。
48.驱动机构130包括设置于框架110上的主动轮1301和驱动主动轮1301的第一驱动电机1302。主动轮1301包括两个,分别设置于框架110的左侧和右侧,每个主动轮1301由一个对应的第一驱动电机1302分别驱动。驱动机构130设置于支撑机构120所包括的前后两组支撑腿1201和前后两组底轮1101之间,其中主动轮1301的运动方向与脚轮1202的运动方向互相平行。
49.清洁机构140设置于框架110后部,包括清洁部件1401和驱动清洁部件1401的第二驱动电机1402。清洁部件1401一端连接在第二驱动电机1402的输出电机轴上,另一端用于与管道内表面接触。清洁部件1401在第二驱动电机1402的驱动下旋转,从而清洁管道内表面。
50.控制模块用于输出控制信号分别控制第一驱动电机1302和第二驱动电机1402的转速和转向。控制模块可以放置在框架110的适当位置,例如框架110中部。控制模块的控制信号包括开始、终止、暂停、前进、后退等,用于控制管道清洁装置100的开始、终止、前进、后退、转弯、清洁、暂停等工作模式。例如所述控制模块包括arduino控制器件。
51.如图1a-e所示的实施例中,支撑机构120包括前后两组弹性支撑腿1201每组弹性伸缩支撑腿包括六条,因此管道清洁装置100包括12条支撑腿。前后两组底轮1101分别与两组弹性支撑腿的位置相对应。在其他实施例中,支撑腿1201的数目可以为两条或以上,其分布在框架110任意位置上并向框架外侧呈辐射状伸出。
52.如图1a-e所示的实施例中,清洁机构140分布于框架110的后端。在其他实施例中,清洁机构140也可分布于框架110前端或中间位置。
53.如图1a-e所示的管道清洁装置100中,支撑机构120、驱动机构130、和清洁机构140在框架110上左右对称分布。
54.管道清洁装置100中,支撑腿1201的长度、底轮1101的高度、主动轮1301的位置以及清洁部件1401的长度可以调节,其设置为与待清洁的管道径向尺寸相匹配,以适应不同
的尺寸的管道,从而方便在管道中行走并有效清洁管道内表面。例如在图1c所示的实施例中,所有支撑腿1201长度相同,左右对称,前后每组脚轮1202和底轮1101大致位于同一圆周上。当弹性伸缩支撑腿1201收缩为最短时,该圆周直径小于管道直径,当弹性伸缩支撑腿1201处于自由状态时,该圆周直径不小于管道直径。
55.管道清洁装置100中,驱动机构120中,左右两个主动轮1301分别由一个第一驱动电机1301驱动,左右两侧的第一驱动电机1301由控制模块150发出的控制信号分别控制。当左右两侧的第一驱动电机1301的控制信号相同时,例如都为前进、后退或停止时,管道清洁装置100可以实现直线前进、后退、停止动作。当左右两侧的第一驱动电机1301的控制信号不同时,则管道清洁装置100可以实现转弯动作。
56.当管道清洁装置100在管道中工作时,第一驱动电机1302驱动主动轮1301带动框架110向前或向后运动。前后两组底轮1101从下部为框架110提供支撑,前后两组支撑腿1201限制并调整框架110在管道径向的位置,从而使得管道清洁装置100在管道内行走时不会前后翻滚或偏向管道一侧。由于脚轮1202为定向被动轮,其与主动轮1301方向相同,使得管道清洁装置100在前后方向运动的阻力较小,其他方向运动的阻力较大,从而可以在一定程度上避免框架110在管道中左右翻滚。框架110下设有四个底轮1101为万向轮,可以在框架110沿管道轴线转弯时改变方向,从而使得框架能够顺利沿管道轴线运动。
57.所述支撑腿1201包括弹簧装置,在与管道内表面接触时为框架110提供沿管道径向的弹性支撑力,所述弹性支撑力与框架110和管道内表面之间的径向距离相对应,从而调整框架在管道内的径向位置。例如,当框架110沿管道中心轴线行走时,由于支撑机构120为左右对称机构,其对框架110在左右两侧的支撑力为平衡状态。当框架110偏向管道一侧时,其与该侧管道内表面之间的径向距离缩短,支撑腿1201的长度被压缩,弹簧装置产生形变,使得弹性支撑腿1201对管道该侧产生弹性支撑力,所述弹性支撑力与弹簧装置的形变相对应,即框架110向管道一侧偏离越多,该侧弹性支撑力越大,该支撑力的方向与框架110偏离的方向相反,因此框架110能够在支撑腿1201的弹性支撑力作用下限制偏离管道中心线的距离,并自动调整其在管道内的位置,保持在管道中心轴线附近。所述支撑腿1201的设置,能够保证管道清洁装置100在管道内沿轴线顺利转弯。
58.管道清洁装置100中,左右两侧的主动轮1301向框架110外侧倾斜一定角度,该设置是为了适应管道的形状,增大主动轮1301与管道内表面的接触面积,从而增加摩擦力。
59.管道清洁装置100在管道中行走时,可以根据需要启动/关停清洁机构140,由此控制其对管道的清洁工作。
60.在一个实施例中,管道清洁装置100还包括传感器,用于测量管道清洁装置在管道内行走的速度,控制模块根据传感器的测量值输出第二控制信号控制第二驱动电机的转速,从而使得清洁部件的转速与管道清洁装置行走的速度相适应。例如,清洁部件1401的转速与管道清洁装置100行走的速度成正比。
61.在一个实施例中,管道清洁装置100还包括传感器,用于测量其在管道内行走的距离,根据该距离结合管道的三维模型确定其在管道内的位置,从而确定其应当行走的方向。
62.在一个实施例中,管道清洁装置100还包括控制界面,用户可以通过控制界面输入操作命令,控制模块接收操作命令之后输出相应的控制信号到各个驱动电机。
63.在一个实施例中,第一驱动电机为工作电压48v,功率120w的直流电机,第二驱动
电机为工作电压24v,40w的直流电机。
64.图2a-2c示出了根据一个示例性实施例的支撑机构120的透视图、后视图和侧视图。
65.支撑机构120固定于框架110上,包括位于框架110前部和后部相对设置的两个限位盘1203,两个限位盘1203的中心连线与限位盘1203的平面垂直。每个限位盘1203包括两块圆形同心限位板1204,支撑腿1201位于每个限位盘1203的两块限位板1204之间,并从限位板1204中心延伸出限位盘1203外。
66.在一个示例性实施例的支撑机构120中,限位盘直径为360mm,支撑腿1201完全收缩时,其末端的脚轮1202所在的圆周直径为750mm,每条支撑腿1201在自由状态比完全收缩状态伸长30mm,该支撑机构120适用于直径800mm的管道。当管道直径不同时,上述尺寸相应变化。
67.图3a-3c示出了根据一个示例性实施例的弹性伸缩支撑腿1201的透视图、侧视图和俯视图。
68.支撑腿1201包括内套筒1205和外套筒1206,内套筒1205设置于外套筒1206中,内套筒1205和外套筒1206由压力弹簧1207连接。弹簧1207一端固定于内套筒1205的孔1位置,另一端固定于外套筒的孔2位置。孔1和孔2可包括分布于支撑腿1201两侧的对称孔,分别对称安装弹簧1207,如图3c所示,以使支撑腿1201两侧受力平衡。内套筒末端连接脚轮1202。
69.支撑腿1201不受力时,弹簧1207处于自由状态,内套筒1205伸出外套筒的距离最长。当弹簧1207受压时,内套筒1205和外套筒1206之间发生相对平移,使得支撑腿1201缩短,其相对平移距离与弹簧1207的弹性力具有对应关系,例如弹性力与平移距离成正比。
70.在图3a-3c所示的实施例中,内套筒1205和外套筒1206都为方形截面,因此内外套筒之间不能相对旋转,由此保证支撑腿1201末端的脚轮1202方向保持不变。
71.图4a-4c示出了根据一个示例性实施例的驱动机构130的透视图、侧视图和后视图。
72.驱动机构130安装于框架110上,位于前后两组底轮1101之间,包括左右对称的主动轮1301-1和1301-2,每个主动轮1301由一个驱动电机1302单独驱动。例如主动轮1301-1由驱动电机1302-1驱动,主动轮1301-2由驱动电机1302-2驱动,由此实现驱动框架前后运动和转弯。
73.如图4c所示,主动轮1301-1和1301-2向框架110外侧倾斜一定角度,例如主动轮1301-1和1301-2平面分别框架左侧和右侧倾斜,与框架110的垂直中线成相同角度,两个主动轮轴线形成v-形。该v-形设置使得主动轮1301与管道内表面的接触面积增大,从而增大摩擦力,使主动轮1301不容易在管道内表面打滑。另一方面,该v-形设置使得管道清洁装置100在管道中心位置重心最低,如果偏离了管道中心线,重心会变高,其自身重力会使得其回复到中心线位置,因此使得管道清洁装置100在管道内保持平衡,而不容易翻转。
74.如图4c的实施例中,主动轮1301的倾斜角度为60度,在其他实施例中,该角度可以与其所接触的管道内表面倾斜度相适应。
75.图5a-5c示出了根据一个示例性实施例的清洁机构140的透视图、侧视图和后视图。
76.清洁机构140包括清洁部件1401和驱动清洁部件1401的驱动电机1402,例如所述
驱动电机1402为直流电机。清洁部件1401一端连接于驱动电机1402的电机轴上,另一端即自由端向驱动电机1402的电机轴周围呈辐射状设置,例如所述自由端为毛刷、海绵等。驱动电机1402启动时,清洁部件1402旋转,其自由端与管道内表面接触,进行清洁操作。
77.图5a-5c的示例性实施例中包括四个清洁部件1401,在其他实施例中,清洁部件的数目可以为一个以上的其他数目。
78.清洁部件1401的长度与管道直径相适应。如图5c所示,清洁部件1401的末端位于直径810mm的圆周上,适用于直径800mm的管道。在其他实施例中,清洁部件的长度可以根据管道直径的不同而进行调整。
79.在一个实施例中,清洁部件1401的端部可以为毛刷以外的清洁装置,例如消毒装置、喷水装置等。
80.在介绍了几个实施例之后,本领域的技术人员可以认识到,不同的改动、另外的结构、等同物,都可以被使用而不会背离本发明的本质。相应的,以上的描述不应该被视为对如以下的权利要求所确定的本发明范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1