一种用于管道堵塞机器人的机械手夹具的制作方法
1.本实用新型涉及管道清理技术领域,具体涉及一种用于管道堵塞机器人的机械手夹具。
背景技术:
2.管道清理是对管道内壁进行清扫以防结垢的一种作业。油料在输送过程中,经常会有一些黏性物质沉积于管内壁,特别是原油输送中的蜡。
3.经过海量检索,发现现有技术公开号为cn207343411u,公开了一种管道清理装置及管道清理机器人,涉及管道清理技术领域,管道清理装置包括驱动机构、传动机构和空心钻头;所述传动机构包括多个传动轴,多个所述传动轴依次可拆卸地连接;所述传动机构的两端分别与所述驱动机构和所述空心钻头连接,用于带动所述空心钻头绕空心钻头的轴线自转。在需要清理管道时,由驱动机构带动空心钻头绕空心钻头的轴线自转,空心钻头的外表面与管道的内壁接触,在空心钻头的外表面与管道的内壁之间的摩擦力作用下,空心钻头能够清理管道内壁上的结垢,无需人工清理管道内壁,提高了清理的便捷性。
4.综上所述,现有的管道清理装置缺少半自动式夹持大型杂物并清理管壁的功能,使得很多自动清洁装置处理后的管道依然留有顽固污渍,清理效果不佳。
技术实现要素:
5.本实用新型提供了一种用于管道堵塞机器人的机械手夹具,解决了以上所述的技术问题。
6.本实用新型解决上述技术问题的方案如下:一种用于管道堵塞机器人的机械手夹具,安装架、安装杆、转动杆、安装槽、安装盘和输出轴,所述安装架外壁设置有所述管道,所述安装架上端设置有所述手臂,所述手臂一侧设置有所述连接杆,所述连接杆下端设置有所述转动杆,所述安装架下端设置有所述安装杆,所述转动杆转动插接于所述安装杆内部,所述安装杆下方设置有所述安装槽,所述安装槽内部设置有所述电机,所述电机上端设置有所述输出轴,所述安装杆下端设置有所述安装盘,所述安装盘下端设置有所述移动盘。
7.本实用新型的有益效果是:使用时手持第一手柄和第二手柄,将装置放入待清理管体内部,需要用到手臂夹持管体内部的顽固垃圾时,相对第二手柄拉起第一手柄,通过力的传递效果,使得转动杆可以向下移动,通过杠杆原理,使得手臂向内夹紧取出垃圾,松开手,通过移动盘和安装盘之间的弹簧的回力效果,手臂可以恢复原位,在清理完顽固堵塞垃圾之后,可以启动电机,电机转动带动转动杆转动,安装架跟随转动带动毛刷对管壁进行进一步清理,方便快捷。
8.在上述技术方案的基础上,本实用新型还可以做如下改进。
9.进一步,所述电机外壁设置有所述安装座,所述安装座与所述安装槽内壁相连接。
10.采用上述进一步方案的有益效果是:安装座的作用是固定电机,防止电机在运输和工作中由于碰撞而脱落,影响整个装置的使用效果。
11.进一步,所述安装杆下表面与所述安装槽上表面均设置有所述第二底座,所述第二底座之间连接有所述弹簧。
12.采用上述进一步方案的有益效果是:第二底座用于安装弹簧,弹簧可以使移动盘在与固定盘相对运动之后有自动回位的效果。
13.进一步,所述手臂一侧外壁设置有所述第一底座,所述连接杆、所述转动杆、所述安装架和所述手臂转动连接处均通过所述转轴连接。
14.采用上述进一步方案的有益效果是:第一底座用于安装连接杆,转轴的作用是使连接杆、转动杆、安装架和手臂转可以具有转动的支点。
15.进一步,所述安装槽两侧均设置有所述第一导轨,所述移动盘与所述第一导轨相适配,所述移动盘内部设置有所述第二导轨,所述安装盘下端设置有所述限位盘,所述限位盘与所述第二导轨相适配。
16.采用上述进一步方案的有益效果是:移动盘可以在第一导轨内部上下移动,限位盘可以在第二导轨上下移动,限位盘使得移动盘与固定盘有一定的运动范围。
17.进一步,所述安装槽下端设置有所述第一手柄,所述移动盘下端设置有所述第二手柄。
18.采用上述进一步方案的有益效果是:手持第二手柄,手指拉动第一手柄向第二手柄运动,可以实现手臂的夹紧。
19.进一步,所述安装架下端外侧设置有所述毛刷,所述输出轴和所述转动杆之间设置有所述嵌合槽。
20.采用上述进一步方案的有益效果是:转动的毛刷可以清理管道内部的污渍,嵌合槽可以将输出轴的转矩传递给转动杆,使得毛刷得以旋转。
21.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
附图说明
22.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
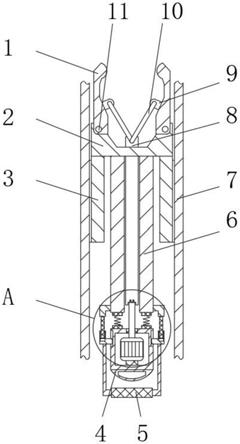
23.图1为本实用新型实施例提供的一种用于管道堵塞机器人的机械手夹具主视示意图;
24.图2为本实用新型实施例提供的一种用于管道堵塞机器人的机械手夹具手臂和连接杆位置示意图;
25.图3为本实用新型实施例提供的一种用于管道堵塞机器人的机械手夹具仰视示意图;
26.图4为本实用新型实施例提供的一种用于管道堵塞机器人的机械手夹具图1中a结构放大示意图。
27.附图中,各标号所代表的部件列表如下:
28.1、手臂;2、安装架;3、毛刷;4、第一手柄;5、第二手柄;6、安装杆;7、管道;8、转动
杆;9、第一底座;10、连接杆;11、转轴;12、安装槽;13、安装盘;14、输出轴;15、第二底座;16、弹簧;17、移动盘;18、电机;19、安装座;20、第一导轨;21、第二导轨;22、限位盘;23、嵌合槽。
具体实施方式
29.以下结合附图1
‑
4对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。在下列段落中参照附图以举例方式更具体地描述本实用新型。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
30.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
32.如图1至图4所示,本实用新型提供了一种用于管道堵塞机器人的机械手夹具,包括安装架2、安装杆6、转动杆8、安装槽12、安装盘13和输出轴14,安装架2外壁设置有管道7,安装架2上端设置有手臂1,手臂1一侧设置有连接杆10,连接杆10下端设置有转动杆8,安装架2下端设置有安装杆6,手臂1一侧外壁设置有第一底座9,连接杆10、转动杆8、安装架2和手臂1转动连接处均通过转轴11连接,第一底座9用于安装连接杆10,转轴11的作用是使连接杆10、转动杆8、安装架2和手臂1转可以具有转动的支点,转动杆8转动插接于安装杆6内部,安装杆6下方设置有安装槽12,安装杆6下表面与安装槽12上表面均设置有第二底座15,第二底座 15之间连接有弹簧16,第二底座15用于安装弹簧16,弹簧16可以使移动盘17在与固定盘相对运动之后有自动回位的效果,安装槽12 内部设置有电机18,电机18外壁设置有安装座19,安装座19与安装槽12内壁相连接,安装座19的作用是固定电机18,防止电机18 在运输和工作中由于碰撞而脱落,影响整个装置的使用效果,如本领域技术人员所熟知的,电机18的提供司空见惯,其均属于常规手段或者公知常识,在此就不再赘述。
33.电机18上端设置有输出轴14,安装架2下端外侧设置有毛刷3,输出轴14和转动杆8之间设置有嵌合槽23,转动的毛刷3可以清理管道7内部的污渍,嵌合槽23可以将输出轴14的转矩传递给转动杆 8,使得毛刷3得以旋转,安装杆6下端设置有安装盘13,安装盘13 下端设置有移动盘17,安装槽12两侧均设置有第一导轨20,移动盘 17与第一导轨20相适配,移动盘17内部设置有第二导轨21,安装盘13下端设置有限位盘22,限位盘22与第二导轨21相适配,移动盘17可以在第一导轨20内部上下移动,限位盘22可以在第二导轨 21上下移动,限位盘22使得移动盘17与固定盘有一定的运动范围,安装槽12下端设置有第一手柄4,移动盘17下端设置有第二手柄5,手持第二手柄5,手指拉动第一手柄4向第二手柄5运动,可以实现手臂1的夹紧。
34.优选的,电机18外壁设置有安装座19,安装座19与安装槽12 内壁相连接,安装座19的作用是固定电机18,防止电机18在运输和工作中由于碰撞而脱落,影响整个装置的使用效果。
35.优选的,安装杆6下表面与安装槽12上表面均设置有第二底座 15,第二底座15之间连接有弹簧16,第二底座15用于安装弹簧16,弹簧16可以使移动盘17在与固定盘相对运动之后有自动回位的效果。
36.优选的,手臂1一侧外壁设置有第一底座9,连接杆10、转动杆 8、安装架2和手臂1转动连接处均通过转轴11连接,第一底座9用于安装连接杆10,转轴11的作用是使连接杆10、转动杆8、安装架 2和手臂1转可以具有转动的支点。
37.优选的,安装槽12两侧均设置有第一导轨20,移动盘17与第一导轨20相适配,移动盘17内部设置有第二导轨21,安装盘13下端设置有限位盘22,限位盘22与第二导轨21相适配,移动盘17可以在第一导轨20内部上下移动,限位盘22可以在第二导轨21上下移动,限位盘22使得移动盘17与固定盘有一定的运动范围。
38.优选的,安装槽12下端设置有第一手柄4,移动盘17下端设置有第二手柄5,手持第二手柄5,手指拉动第一手柄4向第二手柄5 运动,可以实现手臂1的夹紧。
39.优选的,安装架2下端外侧设置有毛刷3,输出轴14和转动杆8 之间设置有嵌合槽23,转动的毛刷3可以清理管道7内部的污渍,嵌合槽23可以将输出轴14的转矩传递给转动杆8,使得毛刷3得以旋转。
40.本实用新型的具体工作原理及使用方法为:使用时手持第一手柄 4和第二手柄5,将装置放入待清理管体内部,需要用到手臂1夹持管体内部的顽固垃圾时,相对第二手柄5拉起第一手柄4,通过力的传递效果,使得转动杆8可以向下移动,通过杠杆原理,使得手臂1 向内夹紧取出垃圾,松开手,通过移动盘17和安装盘13之间弹簧 16的回力效果,手臂1可以恢复原位,在清理完顽固堵塞垃圾之后,可以启动电机18,电机18转动带动转动杆8转动,安装架2跟随转动带动毛刷3对管壁进行进一步清理,方便快捷,解决了现有的管道 7清理装置缺少半自动式夹持大型杂物并清理管壁功能的问题,使得很多自动清洁装置处理后的管道7依然留有顽固污渍,清理效果不佳。
41.以上所述,仅为本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制;凡本行业的普通技术人员均可按说明书附图所示和以上所述而顺畅地实施本实用新型;但是,凡熟悉本专业的技术人员在不脱离本实用新型技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本实用新型的等效实施例;同时,凡依据本实用新型的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本实用新型的技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1