一种多用途水上机器人的制作方法
1.本实用新型属于机器人设备技术领域,尤其涉及一种多用途水上机器人。
背景技术:
2.现在水上作业一般会通过机器人进行作业。
3.目前水产种植业,水产养殖业都用到水上机器人。
4.但是现有的水上机器人还存在着水上作业用途较少,防护效果差和不具备水草切割功能的问题。
5.因此,发明一种多用途水上机器人显得非常必要。
技术实现要素:
6.为了解决上述技术问题,本实用新型提供一种多用途水上机器人,以解决现有的水上机器人存在着水上作业用途较少,防护效果差和不具备水草切割功能的问题。一种多用途水上机器人,包括机器人机架,中控防水盒,控制主机,无线控制模块,机器人转向机,转向座,推进机,螺旋叶,防护网罩,漂浮气囊,多用途喷洒一体泵结构和水草辅助切割防缠绕机结构,所述的机器人机架的内部中间位置螺钉连接有中控防水盒;所述的中控防水盒的内部左右两侧均螺钉连接有控制主机和无线控制模块;所述的机器人机架的上部左右两侧均纵向螺钉连接有机器人转向机;所述的机器人转向机的输出轴贯穿机器人机架的内部,并通过螺栓连接转向座的内部上端;所述的转向座的下端螺栓连接有推进机;所述的推进机的输出轴上键连接有螺旋叶;所述的螺旋叶的外部罩接有防护网罩,并通过螺钉连接推进机的左端;所述的机器人机架的下部前后两侧均横向通过抱箍安装有漂浮气囊;所述的多用途喷洒一体泵结构和水草辅助切割防缠绕机结构均与机器人机架相连接;所述的多用途喷洒一体泵结构包括喷洒嘴,喷洒排,万向接头,喷洒泵,储液箱,注液盖和液位传感器,所述的喷洒嘴均纵向螺纹连接在喷洒排的下部左右两侧;所述的万向接头纵向一端螺纹连接喷洒排的下部中间位置进口处,另一端螺纹连接喷洒泵的上部出口处;所述的喷洒泵螺栓连接在储液箱的上部中间位置出口处;所述的储液箱的上部左右两侧进口处均螺纹连接有注液盖;所述的储液箱的内部右壁上下两侧均螺钉连接有液位传感器。
7.优选的,所述的水草辅助切割防缠绕机结构包括支撑机架,切割电机,安装套,切割轮,切割刀片和防护罩,所述的支撑机架的内侧底部中间位置纵向螺钉连接有切割电机;所述的切割电机的输出轴贯穿支撑机架的内部,并通过键连接安装套的内部;所述的安装套纵向螺纹连接在切割轮的内部中间位置;所述的切割轮的外表面四周螺钉连接有切割刀片;所述的支撑机架的下部左右两侧均螺钉连接有防护罩。
8.优选的,所述的机器人转向机,转向座,推进机,螺旋叶和防护网罩均采用两个,并且所述的防护网罩采用纵截面为长方形的不锈钢网罩。
9.优选的,所述的中控防水盒采用橡胶盒。
10.优选的,所述的喷洒嘴采用雾状铝合金喷嘴,并且四个以上为一组设置。
11.优选的,所述的储液箱横向螺栓连接在机器人机架的上部中间位置。
12.优选的,所述的喷洒泵和储液箱之间管路连接设置。
13.优选的,所述的支撑机架螺栓连接在机器人机架的下部中间位置,并且位于漂浮气囊的外部。
14.优选的,所述的切割刀片采用纵截面为三角形的不锈钢刀片。
15.优选的,所述的防护罩采用pvc塑料罩。
16.与现有技术相比,本实用新型的有益效果为:
17.1.本实用新型中,所述的喷洒嘴,喷洒排,万向接头,喷洒泵,储液箱和注液盖的设置,有利于增加机器人使用用途,可进行喷洒药物或者喷洒其他液体添加剂,增加机器人使用功能。
18.2.本实用新型中,所述的液位传感器的设置,有利于增加水位检测功能,保证喷洒效率。
19.3.本实用新型中,所述的支撑机架,切割电机,安装套,切割轮,切割刀片和防护罩的设置,有利于增加机器人的水草切割功能,可对水草进行裁切,避免发生缠绕问题,保证机器人运行流畅性。
20.4.本实用新型中,所述的中控防水盒,控制主机和无线控制模块的设置,有利于无线控制,方便操作。
21.5.本实用新型中,所述的防护网罩的设置,有利于提高防护效果,保证机器人运行畅快性。
22.6.本实用新型中,所述的漂浮气囊的设置,有利于起到漂浮作用,保证机器人可以运行畅快性,避免出现下沉问题。
附图说明
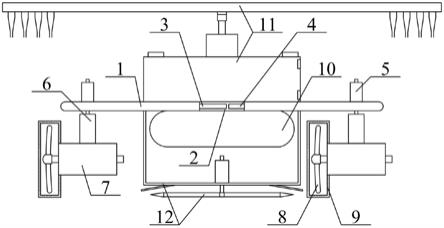
23.图1是本实用新型的结构示意图。
24.图2是本实用新型的多用途喷洒一体泵结构的结构示意图。
25.图3是本实用新型的水草辅助切割防缠绕机结构的结构示意图。
26.图中:
27.1、机器人机架;2、中控防水盒;3、控制主机;4、无线控制模块;5、机器人转向机;6、转向座;7、推进机;8、螺旋叶;9、防护网罩;10、漂浮气囊;11、多用途喷洒一体泵结构;111、喷洒嘴;112、喷洒排;113、万向接头;114、喷洒泵;115、储液箱;116、注液盖;117、液位传感器;12、水草辅助切割防缠绕机结构;121、支撑机架;122、切割电机;123、安装套;124、切割轮;125、切割刀片;126、防护罩。
具体实施方式
28.下面结合附图对本实用新型进行具体描述,如附图1和附图2所示,一种多用途水上机器人,包括机器人机架1,中控防水盒2,控制主机3,无线控制模块4,机器人转向机5,转向座6,推进机7,螺旋叶8,防护网罩9,漂浮气囊10,多用途喷洒一体泵结构11和水草辅助切割防缠绕机结构12,所述的机器人机架1的内部中间位置螺钉连接有中控防水盒2;所述的中控防水盒2的内部左右两侧均螺钉连接有控制主机3和无线控制模块4;所述的机器人机
架1的上部左右两侧均纵向螺钉连接有机器人转向机5;所述的机器人转向机5的输出轴贯穿机器人机架1的内部,并通过螺栓连接转向座6的内部上端;所述的转向座6的下端螺栓连接有推进机7;所述的推进机7的输出轴上键连接有螺旋叶8;所述的螺旋叶8的外部罩接有防护网罩9,并通过螺钉连接推进机7的左端;所述的机器人机架1的下部前后两侧均横向通过抱箍安装有漂浮气囊10;所述的多用途喷洒一体泵结构11和水草辅助切割防缠绕机结构12均与机器人机架1相连接;所述的多用途喷洒一体泵结构11包括喷洒嘴111,喷洒排112,万向接头113,喷洒泵114,储液箱115,注液盖116和液位传感器117,所述的喷洒嘴111均纵向螺纹连接在喷洒排112的下部左右两侧;所述的万向接头113纵向一端螺纹连接喷洒排112的下部中间位置进口处,另一端螺纹连接喷洒泵114的上部出口处;所述的喷洒泵114螺栓连接在储液箱115的上部中间位置出口处;所述的储液箱115的上部左右两侧进口处均螺纹连接有注液盖116;所述的储液箱115的内部右壁上下两侧均螺钉连接有液位传感器117,根据使用用途需求,可向储液箱115内部注入液体药物或者其他液体试剂,可进行喷洒工作,通过喷洒泵114将其吸出,并通过万向接头113导入喷洒排112内部,即可通过喷洒嘴111进行喷洒工作,以增加机器人的使用功能,通过机器人机架1底部的漂浮气囊10可使得机器人漂浮,并通过机器人转向机5带动转向座6进行转向,经过推进机7带动螺旋叶8旋转,即可进行推进工作,以使得机器人可进行多位置水上作业。
29.本实施方案中,结合附图3所示,所述的水草辅助切割防缠绕机结构12包括支撑机架121,切割电机122,安装套123,切割轮124,切割刀片125和防护罩126,所述的支撑机架121的内侧底部中间位置纵向螺钉连接有切割电机122;所述的切割电机122的输出轴贯穿支撑机架121的内部,并通过键连接安装套123的内部;所述的安装套123纵向螺纹连接在切割轮124的内部中间位置;所述的切割轮124的外表面四周螺钉连接有切割刀片125;所述的支撑机架121的下部左右两侧均螺钉连接有防护罩126,为了保证机器人作业稳定性,可通过切割电机122驱动安装套123,切割轮124和切割刀片125进行旋转切割工作,可对水草进行切割,以保证机器人运行安全性,避免发生缠绕问题,保证机器人运行畅快性,通过支撑机架121和防护罩126可对机器人起到防护能力,保证机器人水上作业安全性。
30.本实施方案中,具体的,所述的机器人转向机5,转向座6,推进机7,螺旋叶8和防护网罩9均采用两个,并且所述的防护网罩9采用纵截面为长方形的不锈钢网罩。
31.本实施方案中,具体的,所述的中控防水盒2采用橡胶盒。
32.本实施方案中,具体的,所述的喷洒嘴111采用雾状铝合金喷嘴,并且四个以上为一组设置。
33.本实施方案中,具体的,所述的储液箱115横向螺栓连接在机器人机架1的上部中间位置。
34.本实施方案中,具体的,所述的喷洒泵114和储液箱115之间管路连接设置。
35.本实施方案中,具体的,所述的支撑机架121螺栓连接在机器人机架1的下部中间位置,并且位于漂浮气囊10的外部。
36.本实施方案中,具体的,所述的切割刀片125采用纵截面为三角形的不锈钢刀片。
37.本实施方案中,具体的,所述的防护罩126采用pvc塑料罩。
38.本实施方案中,具体的,所述的液位传感器117,无线控制模块4,机器人转向机5,推进机7,喷洒泵114和切割电机122均与控制主机3导线连接设置。
39.本实施方案中,具体的,所述的无线控制模块4通过无线信号连接操作人员智能手机或者平板电脑。
40.本实施方案中,具体的,所述的液位传感器117采用cyw11型液位传感器,所述的无线控制模块4采用hc-08型蓝牙模块,所述的机器人转向机5采用lx-16a型舵机,所述的推进机7采用外部套接有橡胶套的775型电动机,所述的喷洒泵114采用555型增压泵,所述的切割电机122采用外部套接有橡胶套的775型电动机,所述的控制主机3采用stm32f103c8t6型单片机。
41.本实施方案中,具体的,所述的漂浮气囊10采用两个以上的可充气橡胶气囊。
42.工作原理
43.本实用新型中,根据使用用途需求,可向储液箱115内部注入液体药物或者其他液体试剂,可进行喷洒工作,通过喷洒泵114将其吸出,并通过万向接头113导入喷洒排112内部,即可通过喷洒嘴111进行喷洒工作,以增加机器人的使用功能,通过机器人机架1底部的漂浮气囊10可使得机器人漂浮,并通过机器人转向机5带动转向座6进行转向,经过推进机7带动螺旋叶8旋转,即可进行推进工作,以使得机器人可进行多位置水上作业,为了保证机器人作业稳定性,可通过切割电机122驱动安装套123,切割轮124和切割刀片125进行旋转切割工作,可对水草进行切割,以保证机器人运行安全性,避免发生缠绕问题,保证机器人运行畅快性,通过支撑机架121和防护罩126可对机器人起到防护能力,保证机器人水上作业安全性。
44.利用本实用新型所述的技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1