一种配药机器人的药品溶解装置的制作方法
1.本实用新型涉及配药机器人技术领域,具体涉及的是一种配药机器人的药品溶解装置。
背景技术:
2.目前医院中,大多的药品调配是由医护人员人工操作。药品调配过程中,医护人员一手拿溶媒瓶,一手拿待调配的药品,反复抽吸,调配效率低。为了提高用于药品调配效率,自动配药的配药设备应运而生,药品溶解装置成为不可或缺的一部分。
3.粉剂药品需要注入溶媒溶解,粉剂药品在静止状态下溶解比较缓慢,且需要摇晃才能加速对药物的溶解,目前设备只能一次摇晃或旋转少量药品,且在溶解过程中的药品不能进行药品抽吸,造成配药时间长,效率低。
4.现有技术:
5.1.震动盘:通过偏心轮震等震源,提供高频振动,驱动药瓶震动从而使药瓶震动溶解。缺点:效率低,噪音大、只有一次性震荡溶解完毕后才能进行抽吸工序。
6.2.曲柄连杆机构:通过曲柄连杆,使电机旋转运动变为摆动运动,带动药瓶周期晃动实现溶解。缺点:体积大、只有一次性震荡完毕后才能抽吸,效率低。
7.因此,现有技术还有待提高。
技术实现要素:
8.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种多工位的流程独立的配药机器人的药品溶解装置。
9.为解决以上技术问题,本实用新型采取了以下技术方案:
10.一种配药机器人的药品溶解装置,包括底座,所述底座上设置有中空旋转平台,所述中空旋转平台上设置有摆动机构,所述中空旋转平台的边缘一周依次对应有药瓶放置工位、注液工位、摇晃溶解工位以及抓取工位,所述摆动机构与各个工位一一对应设置,所述摆动机构随着所述中空旋转平台一起旋转。
11.所述的配药机器人的药品溶解装置,其中,所述中空旋转平台的旋转角度为
‑
300
°
~300
°
。
12.所述的配药机器人的药品溶解装置,其中,所述中空旋转平台的旋转角度为
‑
360
°
~360
°
。
13.所述的配药机器人的药品溶解装置,其中,所述摆动机构包括手指以及与所述手指相连的控制机构,所述控制机构包括用于手指夹紧的夹紧控制机构和用于手指旋转的旋转控制机构,所述手指的方向朝向外侧。
14.所述的配药机器人的药品溶解装置,其中,所述手指为包胶气爪,其内侧由软胶包裹。
15.所述的配药机器人的药品溶解装置,其中,所述旋转控制机构为旋转控制气缸,所
述旋转控制气缸可驱动所述手指实现顺时针旋转和逆时针旋转。
16.所述的配药机器人的药品溶解装置,其中,所述旋转控制机构控制所述手指的旋转角度为
‑
180
°
~+180
°
。
17.所述的配药机器人的药品溶解装置,其中,所述中空旋转平台通过旋转电机驱动旋转,所述旋转电机设置于所述底座的内部。
18.所述的配药机器人的药品溶解装置,其中,所述摆动机构的数量至少为4 个,所述摆动机构通过螺钉固定于所述中空旋转平台上。
19.所述的配药机器人的药品溶解装置,其中,所述所述中空旋转平台和所述摆动机构的上方还套设有防尘罩。
20.相较于现有技术,本实用新型公开了一种配药机器人的药品溶解装置包括底座,所述底座上设置有中空旋转平台,所述中空旋转平台上设置有摆动机构,所述中空旋转平台的边缘一周依次对应有药瓶放置工位、注液工位、摇晃溶解工位以及抓取工位,所述摆动机构与各个工位一一对应设置,所述摆动机构随着所述中空旋转平台一起旋转。本实用新型提供的一种配药机器人的药品溶解装置,针对处方较大的药物调配,振动盘可设置多个工位,可以同时进行震荡粉剂瓶震荡溶解,药品溶解完待抓取抽吸,粉剂瓶注液,待装新粉剂药瓶的工作,且同时依次进行,不影响其它流程,真正实现了高效率,多用途。
附图说明
21.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
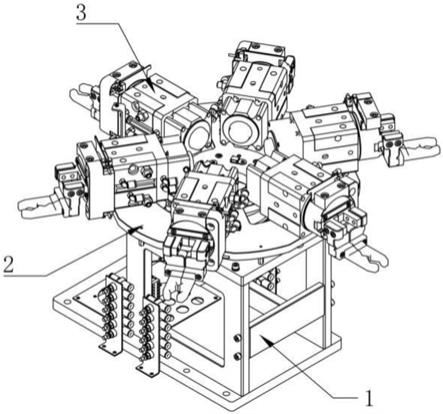
22.图1为本实用新型提供的配药机器人的药品溶解装置的立体图。
23.图2为本实用新型提供的配药机器人的药品溶解装置的爆炸图。
24.图3为本实用新型提供的配药机器人的药品溶解装置的摆动机构的结构示意图。
25.图4为本实用新型提供的配药机器人的药品溶解装置的工位流程示意图。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
27.需要说明的是,当部件被称为“装设于”、“固定于”或“设置于”另一个部件上,它可以直接在另一个部件上或者可能同时存在居连接部件。当一个部件被称为是“连接于”另一个部件,它可以是直接连接到另一个部件或者可能同时存在居连接部件。
28.还需要说明的是,本实用新型实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
29.本实用新型实施例提供了一种配药机器人的药品溶解装置,请参阅图1
‑ꢀ
图4,包括底座1,所述底座1上设置有中空旋转平台2,所述中空旋转平台2 上设置有摆动机构3,所述中空旋转平台2的边缘一周依次对应有药瓶放置工位4、注液工位5、摇晃溶解工位6以及抓取工位7,所述摆动机构3与各个工位一一对应设置,所述摆动机构3随着所述中空旋转平台2一起旋转。
30.本实施例中,请参阅图1、图2和图3,所述药品溶解装置应用于配药机器人上,所述
底座1为方形结构,用于安装中空旋转平台2,所述中空旋转平台2包括转台21和转盘22,所述转台21由旋转电机驱动,所述转台21带动所述转盘22旋转,从而实现了安装在所述中空旋转平台2上的摆动机构3的旋转,而所述摆动机构3还可以实现抓瓶及药瓶注液后180
°
来回摆动,一个工位的动作完成后旋转至下一工位,依次循环进行。
31.进一步的,所述中空旋转平台2的旋转角度为
‑
300
°‑
300
°
,为了避免旋转电机以及中空旋转平台2的电线管路以及气压管路在中空旋转平台2旋转时的无限缠绕,当药品溶解装置旋转完成一个工作周期后,又会反向旋转至初始工作位的状态,而本实施例恰好是
‑
300
°
~300
°
,不仅充分利用空间以及旋转周期,还能使药品溶解更加充分。
32.本实用新型另一实施例中,还可以是,所述中空旋转平台2的旋转角度为
ꢀ‑
360
°‑
360
°
,所述中空旋转平台2正好旋转整整一周完成一个工作周期,更有利于提高工作效率。
33.进一步地,请参阅图1,本实施例中,所述摆动机构3包括手指31以及与所述手指31相连的控制机构32,所述控制机构32包括用于手指31夹紧的夹紧控制机构321和用于手指31旋转的旋转控制机构322,所述摆动机构3 均匀分布于所述中空旋转平台2的边缘一周,与各个工位一一对应,呈中心对称分布,所述手指31的方向朝向外侧,所述摆动机构3的数量至少为4个,较佳的,本实施例中,所述摆动机构的数量设置为6个,设置有三个摇晃溶解工位,药品晃动时间长,便于药品溶解更加充分。
34.更进一步地,请参阅图3,所述手指31为包胶气爪,其内侧由软胶包裹,软胶材料可以是橡胶或塑料,能够有效防止夹持药瓶时夹破瓶。
35.更进一步地,请参阅图1,所述旋转控制机构322为旋转控制气缸,所述旋转控制气缸可驱动所述手指31实现顺时针旋转和逆时针旋转,所述旋转控制机构322控制所述手指的旋转角度为
‑
180
°
~+180
°
,药品晃动幅度大,有利于充分溶解,所述中空旋转平台2通过旋转电机驱动旋转,所述旋转电机设置于所述底座1的内部,真正实现了调配溶媒效率高,可以边注液边抽吸,边摇晃,完全溶解且均匀,配药流程中间没有时间浪费。
36.进一步的,为了便于固定,所述摆动机构3通过螺钉固定于所述中空旋转平台2上,同时,为了做到美观和防尘,所述中空旋转平台和所述摆动机构的上方还套设有防尘罩,将摆动机构3遮住,以实现防尘。
37.为了便于理解,现将配药机器人的药品溶解过程进行总结性描述:
38.本实施例中,所述摆动机构3为6个,请参阅图4,按编号依次为1号摆动机构
‑
6号摆动机构,当配药流程启动时,中空旋转平台启动,1号摆动机构旋转至药瓶放置工位,手指打开,机械手抓取粉剂药品瓶盖,在震荡模块上方,手指闭合,手指抓粉剂药品瓶颈,机械手移开;中空旋转平台旋转,同时6 号摆动机构旋转至药瓶放置工位,1号摆动机构旋转至注液工位,进去注液;当注液完成;中空旋转平台再次启动,把5号摆动机构旋转至药瓶放置工位, 6号摆动机构旋转至注液工位,进去注液;1号摆动机构旋转至摇晃溶解工位,开始震荡溶解药品,当6号摆动机构的药瓶注液完成;中空旋转平台再次启动,把4号摆动机构旋转至药瓶放置工位,5号摆动机构旋转至注液工位,进去注液;6号摆动机构旋转至摇晃溶解工位,1号摆动机构旋转至另一摇晃溶解工位,开始摆动溶解药品,当5号摆动机构的药瓶注液完成;中空旋转平台再次启动,把3号摆动机构旋转至注液工位,4号摆动机构旋转至注液工位,进去注液;5号摆动机构、6号摆动机构和1号摆动机构均旋转至摇晃溶解工位,开始摆动溶解药品,当4号摆动机构的药瓶注液完成;中空旋转平台再次启动,把2号摆动机构旋转至
药瓶放置工位,3号摆动机构旋转至注液工位,进去注液;4号摆动机构、5号摆动机构和6号摆动机构开始摆动溶解药品,1号工位药品震荡溶解完成,旋转至抓取工位,六自由度机械手抓取药品进行抽吸,当3号摆动机构的药瓶注液完成;此时完成一个工作周期,中空旋转平台再次启动,反向旋转300
°
,把1号摆动机构旋转至药瓶放置工位,2号摆动机构进去注液;3号摆动机构、4号摆动机构和5号摆动机构开始摆动溶解药品,6 号摆动机构的药品震荡溶解完成,六自由度机械手抓取药品进行抽吸,重复此步骤,直到配药流程结束。
39.综上所述,本实用新型公开了一种配药机器人的药品溶解装置,包括底座,所述底座上设置有中空旋转平台,所述中空旋转平台上设置有摆动机构,所述中空旋转平台的边缘一周依次对应有药瓶放置工位、注液工位、摇晃溶解工位以及抓取工位,所述摆动机构与各个工位一一对应设置,所述摆动机构随着所述中空旋转平台一起旋转。本实用新型提供的一种配药机器人的药品溶解装置,针对处方量较大的药物调配,振动盘可设置多个工位,可以同时进行震荡粉剂瓶震荡溶解,药品溶解完待抓取抽吸,粉剂瓶注液,待装新粉剂药瓶的工作,且同时依次进行,不影响其它流程,真正实现了高效率,多用途。
40.此外,通过本方案的机构组合,能解决针对粉剂药品溶解数量大的问题,调配效率高,同时可以边注液边抽吸,配药流程中间没有时间浪费,配药效率高。
41.上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1