粉碎机的制作方法
1.本发明涉及粉碎机。
背景技术:
2.以往已知有将通过树脂成型产生的流道(runner)等对象粉碎的粉碎机。例如专利文献1中记载的粉碎机具有主体部,该主体部由具备供对象投入的入口的上侧壳体和具备供被粉碎的对象排出的出口的下侧壳体构成。在该主体部内设有:固定刀,具备梳齿状的刀尖;细粉碎旋转刀,与该固定刀啮合来相对较细地粉碎对象,具备梳齿状的刀尖;粗粉碎旋转刀,相对较粗地粉碎对象;以及罩壳,覆盖粗粉碎旋转刀的出口侧的部分。此外,细粉碎旋转刀和粗粉碎旋转刀以同一旋转中心线为中心旋转。
3.被细粉碎旋转刀和固定刀粉碎的对象被旋转的细粉碎旋转刀朝向主体部的出口输送。另一方面,被粗粉碎旋转刀粉碎的对象被旋转的粗粉碎旋转刀输送,但由于罩壳而无法朝向出口,通过罩壳内而返回至细粉碎旋转刀的入口侧。
4.为了去掉积存于罩壳内的较细的对象,覆盖粗粉碎旋转刀的罩壳相对于粉碎机的主体部可装卸。在主体部的下侧壳体设有承受该罩壳并且在旋转刀的旋转中心线的延伸方向上进行定位的多个引导件。通过引导件使罩壳在旋转中心线延伸方向上定位,由此抑制粗粉碎旋转刀与罩壳的内侧面在旋转中心线延伸方向上的接触。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利第4298785号公报
技术实现要素:
8.发明所要解决的问题
9.然而,在专利文献1中记载的粉碎机的情况下,为了在旋转刀的旋转中心线的延伸方向上定位,罩壳在其外周面具备沿周向延伸的槽,多个引导件分别具备嵌入该槽的突条部。因此,用户在向多个引导件装配罩壳上花费时间。具体而言,用户需要在罩壳的槽中嵌入有一个引导件的突条部的状态下将其他引导件的突条部嵌入罩壳的槽。因此,由于多个引导件各自相对于下侧壳体的固定精度,难以将其他引导件的突条部嵌入至嵌入有一个引导件的突条部的状态的罩壳的槽,其结果是用户有可能在罩壳的装配上花费时间。
10.因此,本发明将以下内容作为问题:在粉碎机中使用户能容易且短时间地将覆盖粗粉碎旋转刀的出口侧部分的罩壳设置于主体部,并且容易且短时间地将该罩壳在粗粉碎旋转刀的旋转中心线的延伸方向上定位。
11.用于解决问题的方案
12.为了解决上述技术的问题,根据本发明的一个方案,
13.提供一种粉碎机,对对象进行粉碎,其中,
14.具备:
15.上侧壳体,具备供所述对象投入的入口;
16.下侧壳体,以能分离的方式载置有所述上侧壳体,具备供粉碎后的对象排出的出口;
17.梳齿状的固定刀,配置于所述上侧壳体;
18.梳齿状的细粉碎旋转刀,配置于所述下侧壳体,与所述固定刀啮合来相对细地粉碎所述对象,将该细地粉碎后的对象朝向所述出口输送;
19.粗粉碎旋转刀,配置于所述下侧壳体,以与所述细粉碎旋转刀相同的旋转中心线为中心旋转,相对粗地粉碎所述对象;以及
20.罩壳,覆盖所述粗粉碎旋转刀的所述出口侧的部分,
21.所述下侧壳体具备罩壳支承构件,该罩壳支承构件包括承受所述罩壳的承受面,
22.所述上侧壳体具备罩壳定位机构,该罩壳定位机构在所述上侧壳体载置于所述下侧壳体时,通过与所述罩壳接触而在所述旋转中心线的延伸方向上对所述罩壳进行定位。
23.发明效果
24.根据本发明,能在粉碎机中使用户能容易且短时间地将覆盖粗粉碎旋转刀的出口侧部分的罩壳设置于主体部,并且容易且短时间地将该罩壳在粗粉碎旋转刀的旋转中心线的延伸方向上定位。
附图说明
25.图1是本发明的一个实施方式的粉碎机的主视图。
26.图2是粉碎机的主体部的立体图。
27.图3是粉碎机的主体部的俯视图。
28.图4是沿图3的a-a线的粉碎机的主体部的剖视图。
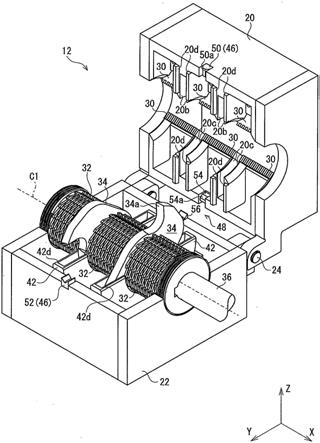
29.图5是打开状态的粉碎机的主体部的立体图。
30.图6是表示罩壳的详细情况的下侧壳体的立体图。
31.图7a是表示罩壳定位机构和被其定位前的罩壳的图。
32.图7b是表示罩壳定位机构和被其定位后的状态的罩壳的图。
33.图8是关闭状态的粉碎机的主体部的左视图。
34.图9是完全打开状态的粉碎机的主体部的左视图。
35.图10是表示夹入防止杆发挥了功能的状态的粉碎机的主体部的左视图。
36.图11是表示第一和第二壳体定位机构的其他例子的立体图。
37.图12是在本发明的其他实施方式的粉碎机中,设置有形状不同的第一和第二罩壳的状态的下侧壳体的俯视图。
38.图13是第一罩壳的设置即将完成之前的下侧壳体的剖视图。
39.图14是在本发明的不同的实施方式的粉碎机中,设置有形状不同的第一和第二罩壳的状态的下侧壳体的俯视图。
40.图15是表示第二罩壳的设置已完成的状态的罩壳支承构件的立体图。
具体实施方式
41.以下参照附图对本发明的实施方式进行说明。
42.图1是本发明的一个实施方式的粉碎机的主视图。需要说明的是,图示的x-y-z坐标系是为了使本发明的实施方式容易理解,不对发明进行限定。此外,x轴方向表示粉碎机的左右方向,y轴方向表示前后方向,z轴方向表示高度方向。
43.如图1所示,粉碎机10具有:主体部12,用于粉碎通过树脂成型产生的流道等对象;投入料斗14,向主体部12投入对象;以及回收料斗16,回收被主体部12粉碎后的对象。
44.图2是粉碎机的主体部的立体图,图3是主体部的俯视图,图4是沿图3的a-a线的主体部的剖视图,而且,图5是打开状态的主体部的立体图。需要说明的是,在图2~图5中,考虑到附图的易看性,省略了实际上不干预发明的粉碎机的构成要素。
45.如图2所示,对于粉碎机10的主体部12,其外形为大致立方体形状的外壳,由上侧壳体20和载置上侧壳体20的下侧壳体22构成。
46.如图2和图4所示,上侧壳体20具备朝向上方向,供对象经由投入料斗14投入的入口20a。下侧壳体22具备朝向下方向,供已粉碎的对象朝向回收料斗16排出的出口22a。
47.需要说明的是,在本实施方式的情况下,如图2所示,上侧壳体20的入口20a为在粉碎机10的前后方向(y轴方向)上的尺寸s1与在左右方向(x轴方向)上的尺寸s2相等的正方形形状。此外,以对应的方式使与主体部12的入口20a连接的投入料斗14具备正方形的排出口(未图示)。因此,能根据粉碎机10的使用环境,改变投入料斗14的朝向,例如以沿竖直方向(z轴方向)延伸的旋转中心线为中心旋转90度,使该投入料斗14与主体部12连接。
48.上侧壳体20以能分离的方式被载置于下侧壳体22,由此使主体部12设为关闭状态。如图2和图5所示,在本实施方式的情况下,上侧壳体20经由支承销24装配于下侧壳体22,该支承销24设于下侧壳体22的后面,沿左右方向(x轴方向)延伸。由此,如图5所示,上侧壳体20能以支承销24为中心回转的方式装配于下侧壳体22。其结果是主体部12能以正面侧打开的状态打开。需要说明的是,如图1所示,在打开主体部12时用户所抓握的把手26设于上侧壳体20。此外,用于将主体部12维持在关闭状态的锁定杆28设于主体部12。
49.如图2至图5所示,粉碎机10的主体部12具备:多个固定刀30,配置于上侧壳体20;多个细粉碎旋转刀32,相对较细地粉碎对象;以及粗粉碎旋转刀34,相对较粗地粉碎对象。
50.多个固定刀30为板状,在其端部具备梳齿状的刀尖。此外,多个固定刀30设于上侧壳体20。在本实施方式的情况下,相对于一个细粉碎旋转刀32设有两个固定刀30。
51.多个细粉碎旋转刀32分别为大致圆柱状,在其外周面具备沿周向以一定的间隔装配的梳齿状的许多刀尖。细粉碎旋转刀32各自的梳齿状的刀尖与对应的固定刀30的梳齿状的刀尖啮合。
52.此外,多个细粉碎旋转刀32分别装配于旋转轴36。旋转轴36以能以沿粉碎机10的左右方向(x轴方向)延伸的旋转中心线c1为中心旋转的方式被支承于下侧壳体22。
53.通过旋转轴36旋转来使多个细粉碎旋转刀32旋转,相互啮合的固定刀30的刀尖和细粉碎旋转刀32的刀尖咬入并较细地粉碎对象。
54.需要说明的是,如图1所示,旋转轴36的右侧端与马达单元38内的马达(未图示)驱动连结,左侧端支承于轴承单元40内的轴承(未图示)。需要说明的是,马达单元38和轴承单元40装配于下侧壳体22。此外,如图1所示,在本实施方式的情况下,投入料斗14以能在如图5所示那样打开主体部12时倒向粉碎机10的左侧的方式装配于轴承单元40侧。
55.如图4所示,被细粉碎旋转刀32较细地粉碎后的对象被旋转的细粉碎旋转刀32的
前刀面32a推进,由此穿过固定刀30的梳齿状的刀尖间,朝向下侧壳体22的出口22a输送。而且,穿过了固定刀30的对象由于自重而离开细粉碎旋转刀32,经由出口22a落至回收料斗16内。此时,固定刀30中位于后方侧的固定刀作为使被粉碎的对象无法返回入口20a侧的刮板发挥功能。
56.在本实施方式的情况下,多个粗粉碎旋转刀34分别为具备两个刀尖的手里剑形状,具备比细粉碎旋转刀32大的外周径。
57.此外,多个粗粉碎旋转刀34分别装配于旋转轴36。具体而言,在旋转轴36处,在相邻的两个细粉碎旋转刀32之间配置有一个粗粉碎旋转刀34。由此,多个粗粉碎旋转刀34在沿其旋转中心线c1的延伸方向(x轴方向)上相邻的两个固定刀30之间旋转。
58.通过旋转轴36旋转来使多个粗粉碎旋转刀34的刀尖较粗地粉碎对象。具体而言,粗粉碎旋转刀34进行较粗地粉碎,以使处在固定刀30上且固定刀30的刀尖和细粉碎旋转刀32的刀尖无法咬入的尺寸的对象成为这些刀尖能咬入的尺寸。
59.被粗粉碎旋转刀34较粗地粉碎后的对象的一部分留在固定刀30上,其余的被粗粉碎旋转刀34的前刀面34a推进,由此朝向下侧壳体22的出口22a输送。罩壳42设于粉碎机10的主体部12,该罩壳42覆盖粗粉碎旋转刀34的出口22a侧的部分,即粗粉碎旋转刀34的实际上下侧一半,以使该被前刀面34a推进的对象不经由出口22a而落至回收料斗16。
60.图6是表示罩壳的详细情况的下侧壳体的立体图。需要说明的是,在图6中,为了表示罩壳42的详细情况,省略了细粉碎旋转刀32、粗粉碎旋转刀34等。
61.如图6所示,罩壳42在从旋转轴36的旋转中心线c1的延伸方向(x轴方向)观察时为半圆形状。具体而言,罩壳42包括:一对侧壁部42a,以夹着粗粉碎旋转刀34的状态在旋转中心线c1的延伸方向(x轴方向)上相互对置;以及底部42b,如图4所示,该底部42b包围粗粉碎旋转刀34的外周且在从旋转中心线c1的延伸方向观察时为圆弧状。
62.如图4和图5所示,旋转的粗粉碎旋转刀34的前刀面34a从罩壳42的前侧进入该罩壳42内,从罩壳42的后侧退出。旋转的粗粉碎旋转刀34的外周端沿罩壳42的底部42b移动。
63.根据这样的罩壳42,被粗粉碎旋转刀34粉碎的对象的一部分被旋转的粗粉碎旋转刀34的前刀面34a推进而进入罩壳42内。罩壳42内的对象被旋转的粗粉碎旋转刀34的前刀面34a抬起而从罩壳42脱出,返回固定刀30的入口20a侧。然后,该返回的对象被固定刀30和细粉碎旋转刀32较细地粉碎。
64.如图4和图5所示,将被粗粉碎旋转刀34的前刀面34a推进的对象引导至罩壳42内的一对前侧侧引导部20b设于上侧壳体20。此外,将载置于从罩壳42退出的粗粉碎旋转刀34的前刀面34a的对象以不从该前刀面34a掉落的方式引导至固定刀30的入口20a侧的一对后侧侧引导部20c设于上侧壳体20。
65.罩壳42以能拆装的方式设于下侧壳体22。具体而言,在本实施方式的情况下,如图4和图6所示,在下侧壳体22的前侧内壁面22b和后侧内壁面22c设有支承罩壳42的多个罩壳支承构件44。在本实施方式的情况下,相对于一个罩壳42设有两个罩壳支承构件44。需要说明的是,也可以将罩壳支承构件44设为与下侧壳体22不同构件。在该情况下,例如经由螺栓等将罩壳支承构件44设于下侧壳体22。也可以作为代替,将罩壳支承构件44和下侧壳体22作为一个部件而一体化。
66.多个罩壳支承构件44分别具备与罩壳42的外周面42c接触,承受该罩壳42的承受
面44a。具体而言,罩壳支承构件44各自的承受面44a由具有与罩壳42的外周面42c实质上相同曲率的弯曲面构成,以使在与罩壳42的外周面42c接触的状态下该罩壳42能以旋转中心线c1为中心旋转。不过,罩壳42c的外周面42c也可以不为弯曲面,例如可以为平面状。
67.此外,如图6所示,多个罩壳支承构件44分别具备在旋转中心线c1的延伸方向(x轴方向)上规定外周面42c与承受面44a接触的状态的罩壳42的能移动的范围的一对侧止动部44b。具体而言,该一对侧止动部44b在旋转中心线c1的延伸方向上相互对置。此外,该相互对置的一对侧止动部44b间的距离l大于罩壳42的厚度w(旋转中心线c1的延伸方向的尺寸)。由此,罩壳42在其外周面42c与罩壳支承构件44的承受面44a接触的状态下,能在能移动的范围内,在旋转中心线c1的延伸方向上移动。关于像这样,罩壳42以能在旋转中心线c1的延伸方向上移动的状态支承于罩壳支承构件44的理由将在后文中叙述。
68.根据这样的多个罩壳支承构件44,能在粉碎机10的前后方向(y轴方向)和高度方向(z轴方向)上对罩壳42进行定位。另一方面,多个罩壳支承构件44未在粉碎机10的左右方向,即旋转中心线c1的延伸方向(x轴方向)上对罩壳42进行定位。
69.如图4和图5所示,在旋转中心线c1的延伸方向(x轴方向)上对罩壳42进行定位的罩壳定位机构20d设于上侧壳体20。在本实施方式的情况下,由设于上侧壳体20的一对前侧侧引导部20b和一对后侧侧引导部20c的下端(如图2所示,在主体部12为关闭状态时的下端)的一对倾斜面(第二倾斜面)构成罩壳定位机构20d。在主体部12为关闭状态时,一对倾斜面20d分别朝向斜下方向且朝向内侧方向(在包含旋转中心线c1的延伸方向(x轴方向)和粉碎机10的高度方向(z轴方向)的平面(z-x平面)上)。
70.与该上侧壳体20的一对倾斜面20d接触的一对倾斜面(第一倾斜面)42d设于罩壳42的侧壁部42a的上端。具体而言,罩壳42的一对倾斜面42d朝向斜上方向且朝向外侧方向(在包含旋转中心线c1的延伸方向(x轴方向)和粉碎机10的高度方向(z轴方向)的平面(z-x平面)上)。
71.图7a示出了罩壳定位机构和被其定位前的罩壳。图7b示出了罩壳定位机构和被其定位后的状态的罩壳。
72.如图7a所示,在主体部12为打开状态,即上侧壳体20离开了下侧壳体22的状态下,由用户将罩壳42设置在罩壳支承构件44的承受面44a。此时,罩壳42会偏向左右(x轴方向)任意一方并被载置于罩壳支承构件44,且/或会以倾斜的姿势被载置。即罩壳42会由用户粗略设置于多个罩壳支承构件44。
73.当用户关闭主体部12时,即当用户将上侧壳体20载置于下侧壳体22时,在此之前上侧壳体20的一对倾斜面20d(或一方的倾斜面20d)与罩壳42的一对倾斜面42d(或对应的一方的倾斜面42d)接触。通过该接触,罩壳42被调整为其外周面42c在旋转中心线c1的延伸方向(x轴方向)上遍及整体地与多个罩壳支承构件44的承受面44a接触的姿势(正常姿势)。与此一同,在旋转中心线c1的延伸方向上,罩壳42被定位于罩壳42的侧壁部42a与粗粉碎旋转刀34未接触的位置(正常位置)。即当用户关闭主体部12时,罩壳42在旋转中心线c1的延伸方向(x轴方向)上自动定位。
74.为了实现这样的定位,罩壳42以能沿旋转中心线c1的延伸方向(x轴方向)移动的方式支承于罩壳支承构件44。此外,如图6所示,罩壳支承构件44的一对侧止动部44b以规定了罩壳42以罩壳42的一对倾斜面42d中的至少一方能与对应的上侧壳体20的倾斜面20d接
触的方式在旋转中心线c1的延伸方向42上能移动的范围的方式,隔开距离l而对置。
75.由于罩壳42以能沿旋转中心线c1的延伸方向(x轴方向)移动的方式支承于多个罩壳支承构件44,因此如图7a所示,用户能容易且短时间地将罩壳42设置于主体部12的下侧壳体22。此外,用户仅通过关闭主体部12,即仅通过使上侧壳体20载置于下侧壳体22,罩壳42就能在旋转中心线c1的延伸方向上容易且短时间地自动定位。
76.需要说明的是,如图5所示,在主体部12为关闭状态时,作为罩壳定位机构的上侧壳体20的一对倾斜面20d分别朝向斜下方向且朝向内侧方向。与该上侧壳体20的一对倾斜面20d接触的罩壳42的一对倾斜面42d朝向斜上方向且朝向外侧方向。也可以作为代替,上侧壳体的一对倾斜面(罩壳定位机构)为朝向外侧方向的一对倾斜面,与该上侧壳体的一对倾斜面接触的罩壳的一对倾斜面为朝向内侧方向的一对倾斜面。
77.如图5所示,罩壳42设置于下侧壳体22,通过上侧壳体20的罩壳定位机构,即倾斜面20d在旋转中心线c1的延伸方向(x轴方向)上进行定位。因此,优选的是,在关闭主体部12时,将上侧壳体20以相对于下侧壳体22定位的状态载置于下侧壳体22。
78.在本实施方式的情况下,如图2和图5所示,为了将上侧壳体20以相对于下侧壳体22被定位的状态载置,主体部12具备第一壳体定位机构46和第二壳体定位机构48。
79.如图2和图5所示,第一壳体定位机构46包括设于上侧壳体20的下端的前侧部分的上侧卡合构件50和设于下侧壳体22的上端的前侧部分的下侧卡合构件52。
80.在本实施方式的情况下,设于下侧壳体22的下侧卡合构件52具备在相对于旋转中心线c1的延伸方向(x轴方向)正交的方向(y轴方向)上延伸的槽52a。此外,在本实施方式的情况下,槽52a具备v字状剖面。
81.与这样的下侧卡合构件52卡合的上侧卡合构件50具备在相对于旋转中心线c1的延伸方向(x轴方向)正交的方向(y轴方向)上延伸,卡合于下侧卡合构件52的槽52a的突条部50a。
82.这样的上侧卡合构件50与下侧卡合构件52卡合,由此在旋转中心线c1的延伸方向(x轴方向)上,上侧壳体20相对于下侧壳体22被定位。
83.如图5所示,第二壳体定位机构48包括设于上侧壳体20的下端的后侧部分的上侧卡合构件54和设于下侧壳体22的上端的后侧部分的下侧卡合构件56。
84.如图6所示,在本实施方式的情况下,设于下侧壳体22的下侧卡合构件56具备在旋转中心线c1的延伸方向(x轴方向)上延伸的槽56a。此外,在本实施方式的情况下,槽56a具备v字状剖面。
85.如图5所示,与这样的下侧卡合构件56卡合的上侧卡合构件54具备沿旋转中心线c1的延伸方向(x轴方向)延伸,与下侧卡合构件56的槽56a、卡合的突条部54a。
86.这样的上侧卡合构件54与下侧卡合构件56卡合,由此在相对于旋转中心线c1的延伸方向(x轴方向)正交的方向(y轴方向)上,上侧壳体20相对于下侧壳体22被定位。
87.需要说明的是,粉碎机10的主体部12具备用于在关闭主体部12时,抑制用户的手指等异物被夹在上侧壳体20与下侧壳体22之间的数个构成要素。
88.图8是关闭状态的粉碎机的主体部的左视图。图9是完全打开状态的粉碎机的主体部的左视图。而且,图10是表示夹入防止杆发挥了功能的状态的粉碎机的主体部的左视图。需要说明的是,在图8~图10中,省略了细粉碎旋转刀32,粗粉碎旋转刀34等。
89.如图1和图8所示,在粉碎机10的主体部12的前面设有夹入防止杆(夹入防止构件)60。具体而言,夹入防止杆60以能以与旋转中心线c1平行的旋转中心线为中心摆动的方式装配于下侧壳体22的前面。此外,夹入防止杆60具备头部60a,如图8所示,在主体部12为关闭状态时,该头部60a与上侧壳体20接触,如图9所示,在主体部12为打开状态时,该头部60a移动至下侧壳体22的上方。需要说明的是,像这样使头部60a移动的夹入防止杆60的摆动例如通过使用弹簧(未图示)或者通过头部60a的自重来进行。
90.如图9所示,当主体部12打开时,即当上侧壳体20离开下侧壳体22时,夹入防止杆60摆动来使其头部60a移动至下侧壳体22的上方。即夹入防止杆60的头部60a以能脱离的方式进入上侧壳体20与下侧壳体22之间。如图10所示,当以该状态使主体部12关闭时,夹入防止杆60的头部60a夹在上侧壳体20的下端的前侧部分与下侧壳体22上端的前侧部分之间。由此,抑制上侧壳体20的下端的前侧部分、下侧壳体22的上端的前侧部分之间夹住用户的手指等异物。
91.此外,如图8~图10所示,保护板(保护构件)62装配于主体部12的左侧面(不存在轴承单元40的左侧面的部分),以使用户的手指等异物无法侵入上侧壳体20的下端的后侧部分与下侧壳体22的上端的后侧部分之间。具体而言,保护板62覆盖因上侧壳体20与下侧壳体22分离而形成的上侧壳体20与下侧壳体22的间隙,由此抑制异物侵入向该间隙。需要说明的是,虽未进行图示但在主体部12的右侧面也装配有相同的保护板。
92.而且,如图9所示,在主体部12为完全打开状态时(即在上侧壳体20向远离下侧壳体22的方向最大程度地回转时),为了抑制该上侧壳体20朝向下侧壳体22向前侧通过自重倒下,上侧壳体20的重心g相对于支承销24位于后侧。因此,在本实施方式的情况下,上侧壳体20能以相对于下侧壳体22超过90度的角度,以支承销24为中心向后侧回转。其结果是上侧壳体20整体相对于支承销24位于后侧。
93.根据以上这样的本实施方式,能在粉碎机10中使用户能容易且短时间地将覆盖粗粉碎旋转刀34的出口侧部分的罩壳42设置于主体部12,并且能容易且短时间地对该罩壳42在粗粉碎旋转刀34的旋转中心线c1的延伸方向上进行定位。
94.虽然举出了上述的实施方式对本发明进行了说明,但本发明的实施方式不限定于此。
95.例如如图4所示,在上述的实施方式的情况下,承受粗粉碎旋转刀34的罩壳42的罩壳支承构件44为两个,但也可以为一个。
96.此外,如图5和图6所示,在上述的实施方式的情况下,在第一和第二壳体定位机构46、48中下侧卡合构件52、56具备槽52a、56a,上侧卡合构件50、54具备突条部50a、54a。然而,本发明的实施方式不限于此。例如也可以在第一和第二壳体定位机构中上侧卡合构件具备槽,下侧卡合构件具备突条部。此外例如也可以使第一壳体定位机构的上侧卡合构件和第二壳体定位机构的下侧卡合构件具备槽和突条部中的一方,第一壳体定位机构的下侧卡合构件和第二壳体定位机构的上侧卡合构件具备槽和突条部中的另一方。
97.而且,如图5和图6所示,在上述的实施方式的情况下,配置于主体部12的前侧的第一壳体定位机构46对上侧壳体20在旋转刀的旋转中心线c1的延伸方向(x轴方向)上,相对于下侧壳体22进行定位。此外,配置于主体部12的后侧的第二壳体定位机构48对上侧壳体20在相对于旋转刀的旋转中心线c1的延伸方向正交的方向(y轴方向)上,相对于下侧壳体
22进行定位。然而,本发明的实施方式不限于此。也可以与此相反,使第一壳体定位机构在相对于旋转刀的旋转中心线的延伸方向正交的方向上定位上侧壳体,第二壳体定位机构在旋转刀的旋转中心线的延伸方向上定位上侧壳体。
98.而且此外,如图5和图6所示,在上述的实施方式的情况下,在第一和第二壳体定位机构46、48中,下侧卡合构件52、56具备v字状的槽52a、56a,但本发明的实施方式不限于此。例如如图11所示,在其他例子的第一和第二壳体定位机构146、148中,下侧卡合构件152、156具备具有圆弧状的剖面的槽152a、156a。另一方面,上侧卡合构件150、154具备与圆弧状的槽152a、156a卡合的突条部150a、154a。
99.像这样,第一和第二壳体定位机构可以为各种实施方式形态,只要至少对于旋转刀的旋转中心线的延伸方向,将上侧壳体相对于下侧壳体定位,则与本发明的实施方式于上侧卡合构件和下侧卡合构件的形状、装配位置无关。
100.此外,即使不具有第一和第二壳体定位机构,只要至少在旋转刀的旋转中心线的延伸方向上,上侧壳体相对于下侧壳体被定位,则可以省略第一和第二壳体定位机构。例如在将主体部构成为上侧壳体相对于下侧壳体沿上下方向升降的情况下等,根据情况能省略第一和第二壳体定位机构。
101.除此之外,如图5和图6所示,在上述的实施方式的情况下,分别相对于两个粗粉碎旋转刀34的罩壳42是共通的。然而,本发明的实施方式不限于此。例如在两个粗粉碎旋转刀的形状不同的情况下(例如因制造误差(许容误差)而不同的情况),也可以对于该两个粗粉碎旋转刀分别使用专用的罩壳,即不同的罩壳。不过,在该情况下,需要不将对于两个粗粉碎旋转刀中的一方专用的罩壳设置于另一方的粗粉碎旋转刀。
102.图12是在本发明的其他实施方式的粉碎机中,设置有形状不同的第一和第二罩壳的状态的下侧壳体的俯视图。此外,图13是第一罩壳的设置即将完成之前的下侧壳体的剖视图。需要说明的是,在图12和图13中,省略细粉碎旋转刀和粗粉碎旋转刀等。
103.图12和图13所示的其他实施方式的粉碎机具有形状不同的第一和第二罩壳142a、142b。在图12和图13所示的实施方式的情况下,第一和第二罩壳142a、142b具备以相对于粗粉碎旋转刀的旋转中心线c1的延伸方向(x轴方向)正交的平面为基准而平面对称的形状。
104.具体而言,第一和第二罩壳142a、142b分别在其前侧部分具备朝向主体112的前方突出的棒状突起142e。在第一罩壳142a中,棒状突起142e设于相对于罩壳142a的厚度中心(旋转中心线c1的延伸方向(x轴方向)的中心)靠一侧(在本实施方式的情况下为主体112的左侧)。与此相对,在第二罩壳142b中,棒状突起142e设于相对于罩壳142b的厚度中心靠另一侧(在本实施方式的情况下为主体112的右侧)。
105.作为与这样的第一和第二罩壳142a、142b各自的棒状突起142e卡合的第一和第二卡合部,例如在粉碎机的前后方向(y轴方向)上延伸的槽部122d、122e设于下侧壳体122的上表面122f的前侧部分。具体而言,在第一罩壳142a被支承于两个罩壳支承构件44的状态下,在能与该棒状突起142e卡合的下侧壳体122上的位置形成有槽部122d。此外,在第二罩壳142b被支承于两个罩壳支承构件144的状态下,在能与该棒状突起142e卡合的位置形成有槽部122e。
106.通过这样的构成,不会将第一和第二罩壳142a、142b相互错位地设置于下侧壳体122。即若第一和第二罩壳142a、142b相互错位,则各自的棒状突起142e无法卡合于槽部
122d、122e,无法载置于罩壳支承构件44上。其结果是,能不使第一和第二罩壳142a、142b相互错位地设置,而是相对于对应的粗破碎旋转刀地设置。
107.此外,能抑制将第一和第二罩壳142a、142b前后相反地设置。
108.需要说明的是,分别设于第一和第二罩壳142a、142b的棒状突起142e可以为相互不同的形状。例如剖面形状、长度可以不同。
109.在第一和第二罩壳142a、142b各自的棒状突起142e为相互不同的剖面形状的情况下,例如一方为矩形形状而另一方为倒三角形形状的情况下,卡合于它们的下侧壳体122的槽部的剖面形状也可以为相互不同的剖面形状,可以一方为矩形形状而另一方为倒三角形形状。在该情况下,在第一和第二罩壳142a、142b各自设有棒状突起142e的位置可以为厚度方向(x轴方向)的中心。
110.此外,如图12、图13所示,也可以代替将棒状突起142e、卡合于该棒状突起142e的槽部122d、122e设于下侧壳体122的前侧,而将它们设于下侧壳体122的后侧。
111.即第一罩壳142a、142b具备不同的形状,并且下侧壳体122具备仅能与该第一罩壳142a卡合的第一卡合部和仅能与第二罩壳142b卡合的第二卡合部即可。
112.图14是在本发明的不同的实施方式的粉碎机中设置了形状不同的第一和第二罩壳的状态的下侧壳体的俯视图。此外,图15是表示第二罩壳的设置已完成的状态的罩壳支承构件的立体图。
113.图14和图15所示的其他实施方式的粉碎机具有形状不同的第一和第二罩壳242a、242b。在图14和图15所示的实施方式的情况下,第一和第二罩壳242a、242b具备以与粗粉碎旋转刀的旋转中心线c1的延伸方向(x轴方向)正交的平面为基准平面而对称的形状。
114.第一和第二罩壳242a、242b分别在其前侧部分具备在旋转中心线c1的延伸方向(x轴方向)上相互向反方向突出的突起部242e。在本实施方式的情况下,第一罩壳242a的突起部242e向下侧壳体222的左侧突出,第二罩壳242b的突起部242e向下侧壳体222的右侧突出。
115.在图14和图15所示的实施方式的情况下,为了支承第一和第二罩壳242a、242b,三种罩壳支承构件244a、244b、244c设于下侧壳体222。
116.罩壳支承构件244a支承第一罩壳242a的前侧部分,并具备隔着第一罩壳242a在其厚度方向(x轴方向)上相互对置的一对止动部244b、244c。为了避免与第一罩壳242a的突起部242e的干涉,罩壳支承构件244a的一方的止动部244c设得比另一方的止动部244b小。即止动部244c相当于切掉了止动部244b的一部分。
117.罩壳支承构件244b支承第二罩壳242b的前侧部分,并具备隔着第二罩壳242b在其厚度方向(x轴方向)上相互对置的一对止动部244b、242c。为了避免与第二罩壳242b的突起部242e的干涉,罩壳支承构件244b的一方的止动部244c设得比另一方的止动部244b小。
118.罩壳支承构件244c支承第一和第二罩壳242a、242b的后侧部分,具备在该罩壳支承构件244c的厚度方向(x轴方向)上相互对置的一对止动部242b。
119.通过这样的构成,不会将第一和第二罩壳242a、242b相互错位地设置于下侧壳体222。即若第一和第二罩壳242a、242b相互错位,则各自的突起部242e与罩壳支承构件槽部244a,244b的止动部244b接触,无法载置于罩壳支承构件244a、244b的承受面244a上。其结果是,能不使第一和第二罩壳242a、242b相互错位地设置,而是相对于对应的粗破碎旋转刀
地设置。
120.此外,能抑制将第一和第二罩壳242a、242b前后相反地设置。
121.需要说明的是,作为代替,也可以在罩壳支承构件设置具备不同的形状或设于不同的位置的突起(凸部),在第一和第二罩壳设置对应的凹部。
122.此外,如图14、图15所示,也可以代替将突起部242e或罩壳支承构件244a、244b设于下侧壳体222的前侧,而将它们设于下侧壳体222的后侧。
123.即第一罩壳242a、242b具备不同的形状,并且一对罩壳支承构件244a、244c具备仅能与第一罩壳242a卡合的形状,一对罩壳支承构件244b、244c具备仅能与第二罩壳242b卡合的形状即可。
124.即本发明在广义上为对对象进行粉碎的粉碎机,其中,具备:上侧壳体,具备供所述对象投入的入口;下侧壳体,以能分离的方式载置有所述上侧壳体,具备供被粉碎的对象排出的出口;梳齿状的固定刀,配置于所述上侧壳体;梳齿状的细粉碎旋转刀,配置于所述下侧壳体,与所述固定刀啮合来相对较细地粉碎所述对象,将该粉碎得较细的对象朝向所述出口输送;粗粉碎旋转刀,配置于所述下侧壳体,以与所述细粉碎旋转刀相同的旋转中心线为中心旋转,相对较粗地粉碎所述对象;以及罩壳,覆盖所述粗粉碎旋转刀的所述出口侧的部分,所述下侧壳体具备罩壳支承构件,该罩壳支承构件包括承受所述罩壳的承受面,所述上侧壳体具备罩壳定位机构,给罩壳定位机构在所述上侧壳体载置于所述下侧壳体时,通过与所述罩壳接触而在所述旋转中心线的延伸方向上对所述罩壳进行定位。
125.产业上的可利用性
126.本发明能应用于具备局部覆盖旋转刀的罩壳的粉碎机。
127.附图标记说明:
128.20:上侧壳体;
129.20d:罩壳定位机构;
130.22:下侧壳体;
131.30:固定刀;
132.32:细粉碎旋转刀;
133.34:粗粉碎旋转刀;
134.42:罩壳;
135.44:罩壳支承构件;
136.44a:承受面;
137.c1:旋转中心线。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1