一种骨科石膏回收破碎设备的制作方法
1.本发明涉及一种破碎设备,尤其涉及一种骨科石膏回收破碎设备。
背景技术:
2.石膏是骨科当中常用的医疗材料,具有价格便宜、操作简便、强度高等优点,广泛的用于骨科的治疗当中,主要起到保护、固定和矫正的作用,骨科医生为了让骨折患者在肢体复位后保持患肢固定,需要为患者打上石膏,当患者将石膏使用完后,通常需要将使用过的石膏进行回收处理,现有的一些破碎设备是通过挤压将石膏破碎,但破碎效果不明显,还残留大量块状的石膏,且在破碎的过程中,还会产生大量的粉尘,污染环境以及对人体产生危害。
3.专利申请cn208583792u,公开日20190308,公开了一种医用骨科石膏破碎装置,包括箱体、进料口、主动辊、从动辊、传送带、吸尘器、控制器、切割机、挡板、移动物体探测器、水箱、水管、第一喷淋头、第二喷淋头、控制开关、滤网、绞龙、驱动电机、出料口和布料收集箱,箱体左侧壁顶端设置有进料口,主动辊靠近箱体内部左侧壁设置,从动辊水平设置于主动辊右侧,主动辊与从动辊之间设置有传送带,本发明结构简单,操作方便,便于对骨外科用石膏垃圾进行破碎处理,使得破碎处理更加彻底,能够智能化控制水资源的使用,极大地避免了水源的浪费,同时具有分离布料和石膏与水结成的晶体的功能,具有很强的实用性,然后,该装置是切割机对石膏进行切碎,只能进行一次切割,不能二次对石膏进行切割粉碎。
4.因此,根据上述出现的情况,市场上需要设计出一种破碎效果较佳、对环境污染小和使用方便的骨科石膏回收破碎设备。
技术实现要素:
5.本发明的目的在于提供一种破碎效果较佳、对环境污染小和使用方便的骨科石膏回收破碎设备,能够解决上述背景技术中提出的现有的一些破碎设备是通过挤压将石膏破碎,但破碎效果不明显,还残留大量块状的石膏,且在破碎的过程中,还会产生大量的粉尘,污染环境以及对人体产生危害的缺点。
6.本发明的技术方案是:一种骨科石膏回收破碎设备,包括:基座和第一支撑架,基座上两侧均设有四个第一支撑架;破碎箱,八个第一支撑架之间设有破碎箱;第一转轴,破碎箱两侧均转动式设有第一转轴;破碎轮,两个第一转轴上设有破碎轮;防尘机构,破碎箱上设有防尘机构;破碎机构,破碎箱和两个第一转轴之间设有破碎机构;下料机构,基座和破碎箱之间设有下料机构。
7.有益地,防尘机构包括:
推板,破碎箱上侧滑动式设有推板;第一滑杆,推板上侧滑动式设有第一滑杆;第一楔形块,第一滑杆上设有第一楔形块;第一弹簧,第一滑杆上绕有第一弹簧,第一弹簧两端分别与第一滑杆和推板连接;第二楔形块,破碎箱顶部设有第二楔形块,第二楔形块与第一楔形块配合;手柄,破碎箱两侧均滑动式设有手柄,手柄与推板固定连接。
8.有益地,破碎机构包括:第二支撑架,破碎箱上设有第二支撑架;第一减速电机,第二支撑架上安装有第一减速电机,第一减速电机与一侧的第一转轴固定连接;直齿轮组,两个第一转轴之间设有直齿轮组;第一接触开关,破碎箱上侧设有第一接触开关,第一接触开关与一侧的手柄配合。
9.有益地,下料机构包括:滑槽,破碎箱下部和基座之间设有两个滑槽;挡料块,两个滑槽之间滑动式设有挡料块;第一固定块,基座上设有第一固定块;第一电动推杆,第一固定块上安装有第一电动推杆,第一电动推杆的伸缩杆与挡料块固定连接;第二接触开关,基座上设有第二接触开关。
10.有益地,还包括有定量机构,定量机构包括:固定架,破碎箱上侧设有三个固定架;第二电动推杆,三个固定架之间安装有第二电动推杆;第二固定块,破碎箱两侧均设有第二固定块;第二滑杆,两个第二固定块上均滑动式设有第二滑杆;连接块,两个第二滑杆之间设有连接块,连接块与第二电动推杆的伸缩杆固定连接;第二弹簧,两个第二滑杆上均绕有第二弹簧,第二弹簧两端分别与连接块和第二固定块连接;异形块,连接块两侧均设有异形块;第三转轴,破碎箱下部两侧均转动式设有第三转轴;挡板,两个第三转轴上均设有挡板;一侧的挡板底部设有压力传感器;摆块,第三转轴两侧均设有摆块,摆块与同侧的异形块配合;扭力弹簧,第三转轴两侧均绕有扭力弹簧,扭力弹簧两端分别与破碎箱和摆块连接。
11.有益地,还包括有粉碎机构,粉碎机构包括:第三支撑架,基座上设有第三支撑架;第二减速电机,第三支撑架中间安装有第二减速电机;第四转轴,破碎箱下侧中间转动式设有第四转轴,第四转轴与第二减速电机的输
出轴固定连接;粉碎刀组,第四转轴上设有粉碎刀组。
12.有益地,还包括有筛选机构,筛选机构包括:距离传感器,破碎箱上设有距离传感器;第四支撑架,基座上设有第四支撑架;第三减速电机,第四支撑架上安装有第三减速电机;第五转轴,第三减速电机的输出轴上设有第五转轴;凸轮,第五转轴上设有凸轮;第五支撑架,基座上两侧均设有两个第五支撑架;筛板,基座上滑动式设有筛板;滑块,四个第五支撑架上均滑动式设有滑块,滑块与筛板固定连接,滑块与基座滑动式连接;推块,一侧的两个滑块之间设有推块,推块与凸轮配合;第三弹簧,四个滑块上均绕有第三弹簧,第三弹簧两端分别与滑块和第五支撑架连接。
13.有益地,还包括有控制箱,基座上安装有控制箱,控制箱内安装有开关电源、控制模块、电源模块,开关电源为整个回收破碎设备供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;距离传感器、压力传感器、第一接触开关和第二接触开关均与控制模块通过电性连接;第一电动推杆、第二电动推杆、第一减速电机、第二减速电机和第三减速电机均与控制模块通过继电器控制模块连接。
14.与现有技术相比,本发明具有如下优点:1、本发明通过第一弹簧复位带动第一滑杆向下运动,从而带动第一楔形块向下运动,使得第二楔形块能卡住第一楔形块,可防止石膏在破碎的过程中大量的灰尘散出,起到防尘的效果;2、通过两侧的第一转轴转动一分钟,使得两个破碎轮转动一分钟,从而使得破碎轮能对石膏进行破碎,实现破碎的效果;3、通过控制模块控制第一电动推杆的伸缩杆伸长至最大位置,从而带动挡料块向上运动至最大位置,使得能将破碎箱的出料口打开,当破碎箱的出料口打开后,破碎的石膏能从出料口掉落下来,实现下料的效果;4、通过异形块向下运动与同侧的摆块接触,使得同侧的摆块向外摆动,扭力弹簧扭转形变,从而带动第三转轴转动,进而带动挡板向外摆动,使得挡板上破碎的石膏掉落下去,实现定量的效果;5、通过第二减速电机的输出轴转动,从而带动第四转轴转动,进而带动粉碎刀组转动,使得能对破碎的石膏再次粉碎,实现粉碎的效果;6、通过筛板左右运动能对粉碎的石膏进行筛选,较细的石膏粉则掉落到基座上,较粗的石膏粉则留在筛板上,实现筛选的效果。
附图说明
15.图1为本发明的立体结构示意图。
16.图2为本发明的剖面立体结构示意图。
17.图3为本发明的防尘机构立体结构示意图。
18.图4为本发明的破碎机构剖面立体结构示意图。
19.图5为本发明的下料机构立体结构示意图。
20.图6为本发明的定量机构剖面立体结构示意图。
21.图7为本发明的定量机构立体结构示意图。
22.图8为本发明的粉碎机构立体结构示意图。
23.图9为本发明的筛选机构立体结构示意图。
24.图10为本发明的筛选机构剖面立体结构示意图。
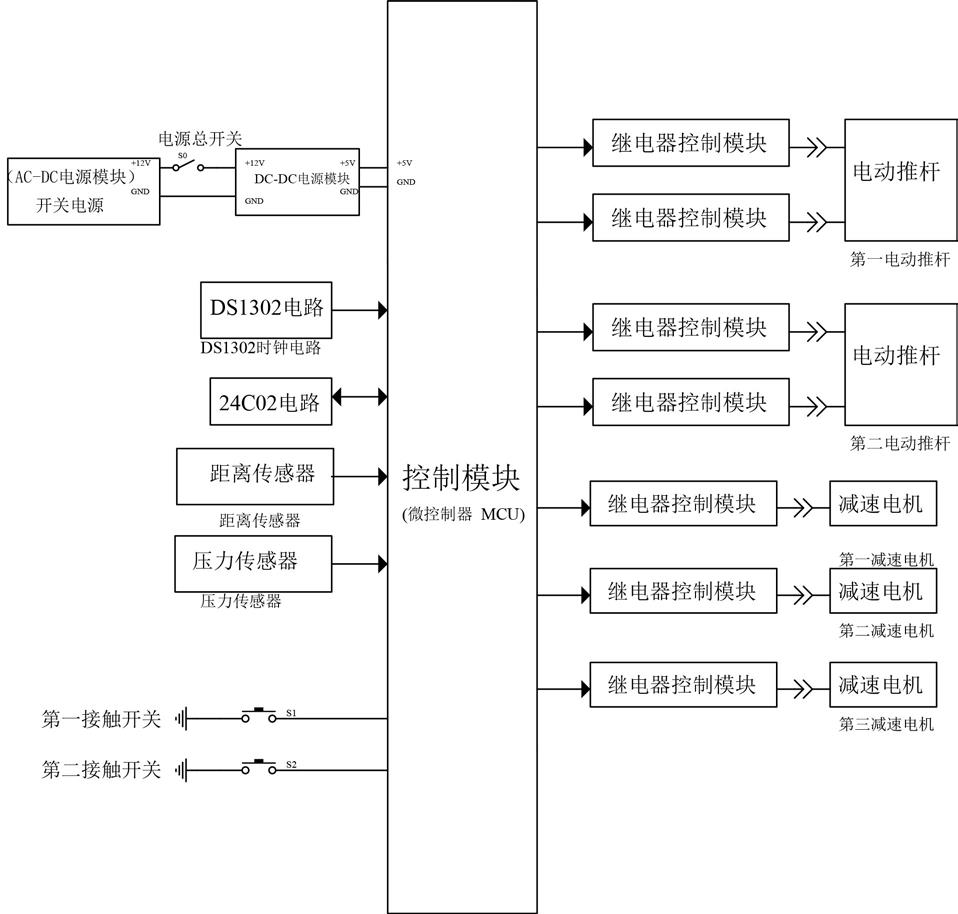
25.图11为本发明的电路框图。
26.图12为本发明的电路原理图。
27.图中标记为:1、基座,2、第一支撑架,3、破碎箱,4、控制箱,5、第一转轴,6、破碎轮,7、防尘机构,71、推板,72、第一滑杆,73、第一楔形块,74、第一弹簧,75、第二楔形块,76、手柄,8、破碎机构,81、第二支撑架,82、第一减速电机,83、直齿轮组,84、第一接触开关,9、下料机构,91、挡料块,92、滑槽,93、第一固定块,94、第一电动推杆,95、第二接触开关,10、定量机构,101、固定架,102、第二电动推杆,103、第二固定块,104、第二滑杆,105、第二弹簧,106、连接块,107、异形块,108、第三转轴,109、挡板,1010、压力传感器,1011、摆块,1012、扭力弹簧,11、粉碎机构,111、第三支撑架,112、第二减速电机,113、第四转轴,114、粉碎刀组,12、筛选机构,121、距离传感器,122、第四支撑架,123、第三减速电机,124、第五转轴,125、凸轮,126、推块,127、第五支撑架,128、滑块,129、第三弹簧,1210、筛板。
具体实施方式
28.本发明中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以用任何方式组合。
29.本发明(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的并加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
30.下面将结合本发明实施例中的附图1至图12本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例只是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.如图1至图12所示,一种骨科石膏回收破碎设备,包括有基座1、第一支撑架2、破碎箱3、第一转轴5、破碎轮6、防尘机构7、破碎机构8和下料机构9,基座1上左右两侧均设有四个第一支撑架2,八个第一支撑架2之间设有破碎箱3,破碎箱3内前后两侧均转动式设有第一转轴5,两个第一转轴5上设有破碎轮6,破碎箱3上设有防尘机构7,破碎箱3和两个第一转轴5之间设有破碎机构8,基座1和破碎箱3之间设有下料机构9。
32.防尘机构7包括有推板71、第一滑杆72、第一楔形块73、第一弹簧74、第二楔形块75和手柄76,破碎箱3上侧右部滑动式设有推板71,推板71上侧滑动式设有第一滑杆72,第一滑杆72上设有第一楔形块73,第一滑杆72上绕有第一弹簧74,第一弹簧74两端分别与第一
滑杆72和推板71连接,破碎箱3顶部设有第二楔形块75,第二楔形块75与第一楔形块73配合,破碎箱3右部前后两侧均滑动式设有手柄76,手柄76与推板71固定连接。
33.破碎机构8包括有第二支撑架81、第一减速电机82、直齿轮组83和第一接触开关84,破碎箱3右侧设有第二支撑架81,第二支撑架81上安装有第一减速电机82,两个第一转轴5右侧之间设有直齿轮组83,破碎箱3前部右上侧设有第一接触开关84,第一接触开关84与前侧的手柄76配合。
34.下料机构9包括有挡料块91、滑槽92、第一固定块93、第一电动推杆94和第二接触开关95,破碎箱3下部右侧和基座1之间设有两个滑槽92,两个滑槽92之间滑动式设有挡料块91,基座1上设有第一固定块93,第一固定块93上安装有第一电动推杆94,第一电动推杆94的伸缩杆与挡料块91固定连接,基座1上右侧设有第二接触开关95。
35.还包括有定量机构10,定量机构10包括有固定架101、第二电动推杆102、第二固定块103、第二滑杆104、第二弹簧105、连接块106、异形块107、第三转轴108、挡板109、压力传感器1010、摆块1011和扭力弹簧1012,破碎箱3左上侧设有三个固定架101,三个固定架101之间安装有第二电动推杆102,破碎箱3左部前后两侧均设有第二固定块103,两个第二固定块103上均滑动式设有第二滑杆104,两个第二滑杆104之间设有连接块106,连接块106与第二电动推杆102的伸缩杆固定连接,两个第二滑杆104上均绕有第二弹簧105,第二弹簧105两端分别与连接块106和第二固定块103连接,连接块106前后两侧均设有异形块107,破碎箱3下部左右两侧均转动式设有第三转轴108,两个第三转轴108上均设有挡板109,左侧的挡板109底部设有压力传感器1010,第三转轴108前后两侧均设有摆块1011,摆块1011与同侧的异形块107配合,第三转轴108前后两侧均绕有扭力弹簧1012,扭力弹簧1012两端分别与破碎箱3和摆块1011连接。
36.还包括有粉碎机构11,粉碎机构11包括有第三支撑架111、第二减速电机112、第四转轴113和粉碎刀组114,基座1上设有第三支撑架111,第三支撑架111中间安装有第二减速电机112,破碎箱3下侧中间转动式设有第四转轴113,第四转轴113与第二减速电机112的输出轴固定连接,第四转轴113上设有粉碎刀组114。
37.还包括有筛选机构12,筛选机构12包括有距离传感器121、第四支撑架122、第三减速电机123、第五转轴124、凸轮125、推块126、第五支撑架127、滑块128、第三弹簧129和筛板1210,破碎箱3右侧设有距离传感器121,基座1上右侧设有第四支撑架122,第四支撑架122上安装有第三减速电机123,第三减速电机123的输出轴上设有第五转轴124,第五转轴124上设有凸轮125,基座1上前后两侧均设有两个第五支撑架127,基座1上滑动式设有筛板1210,四个第五支撑架127上均滑动式设有滑块128,滑块128与筛板1210固定连接,滑块128与基座1滑动式连接,右侧的两个滑块128之间设有推块126,推块126与凸轮125配合,四个滑块128上均绕有第三弹簧129,第三弹簧129两端分别与滑块128和第五支撑架127连接。
38.还包括有控制箱4,基座1上右侧安装有控制箱4,控制箱4内安装有开关电源、控制模块、电源模块,开关电源为整个回收破碎设备供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;距离传感器121、压力传感器1010、第一接触开关84和第二接触开关95均与控制模块通过电性连接;第一电动推杆94、第二电动推杆102、第一减速电机82、第二减速电机112和第三减速电机123均与控制模块通过继电器控制模块连接。
39.当人们需要对使用过的石膏进行回收破碎时,可使用这种骨科石膏回收破碎设备,首先人们需要按下电源总开关,为本设备上电,随后人们可将回收的石膏放在破碎箱3上,然后推动防尘机构7运转,使得能将石膏推进破碎箱3内部,当防尘机构7部件与破碎机构8部件接触时,破碎机构8部件发出信号,控制模块接收到信号后控制破碎机构8运转一分钟,从而带动第一转轴5运转一分钟,进而带动破碎轮6运转一分钟,使得能对石膏破碎,一分钟后,控制模块再控制破碎机构8停止工作,人们可手动按动下料机构9部件,下料机构9部件发出信号后,控制模块接收到信号后控制下料机构9运转,使得能将破碎箱3的出料口打开,使得破碎的石膏掉落下来,当破碎箱3的石膏都掉落完后,人们再次按动下料机构9部件,下料机构9部件再次发出信号,控制模块接收到信号后控制下料机构9反向运转,使得能将破碎箱3的出料口关闭,随后人们停止推动防尘机构7即可,然后人们再次按下电源总开关,将本设备断电。
40.人们可将石膏放在破碎箱3上,随后手动拉动手柄76向左运动,从而带动推板71向左运动,进而带动第一滑杆72、第一楔形块73和第一弹簧74均向左运动,推板71向左运动能将石膏推进破碎箱3内部,当第一楔形块73向左运动与第二楔形块75接触时,第二楔形块75使得第一楔形块73向上运动,从而带动第一滑杆72向上运动,第一弹簧74被压缩,当第一楔形块73越过第二楔形块75时,由于第一弹簧74复位带动第一滑杆72向下运动,从而带动第一楔形块73向下运动,使得第二楔形块75能卡住第一楔形块73,可防止石膏在破碎的过程中大量的灰尘散出,起到防尘的效果,当石膏破碎完后,人们可手动拉动第一滑杆72向上运动,从而第一楔形块73向上运动,第一弹簧74被压缩,随后再拉动手柄76向右运动,从而带动推板71向左运动,进而带动第一滑杆72、第一楔形块73和第一弹簧74均向左运动,使得第二楔形块75不能卡住第一楔形块73,当人们松手后,由于第一弹簧74复位带动第一滑杆72向下运动,从而带动第一楔形块73下运动复位。
41.当前侧的手柄76向左运动与第一接触开关84接触时,第一接触开关84发出信号,控制模块接收到信号后控制第一减速电机82的输出轴转动一分钟,从而带动前侧的第一转轴5转动一分钟,进而带动直齿轮组83转动一分钟,使得后侧的第一转轴5转动一分钟,当两侧的第一转轴5转动一分钟时,使得两个破碎轮6转动一分钟,从而使得破碎轮6能对石膏进行破碎,实现破碎的效果,一分钟后,控制模块控制第一减速电机82停止工作,当前侧的手柄76向右运动与第一接触开关84不接触时,第一接触开关84不发出信号。
42.当石膏破碎完后,人们可手动按动第二接触开关95,第二接触开关95发出信号,控制模块控制第一电动推杆94的伸缩杆伸长至最大位置,从而带动挡料块91向上运动至最大位置,使得能将破碎箱3的出料口打开,当破碎箱3的出料口打开后,破碎的石膏能从出料口掉落下来,实现下料的效果,当第一电动推杆94的伸缩杆伸长至最大位置后,控制模块控制第一电动推杆94的伸缩杆停止工作,当破碎箱3中破碎的石膏都掉落出来后,人们再次按动第二接触开关95,第二接触开关95发出信号,控制模块接收到信号后控制第一电动推杆94的伸缩杆缩短至最小位置,从而带动挡料块91向下运动至最小位置,使得能将破碎箱3的出料口关闭,当第一电动推杆94的伸缩杆缩短至最小位置后,控制模块再控制第一电动推杆94的伸缩杆停止工作。
43.当破碎的石膏掉落在挡板109上后,压力传感器1010检测到的压力值与控制模块中的压力值一致时,控制模块控制第二电动推杆102的伸缩杆伸长至最大位置,从而带动连
接块106向下运动,进而带动异形块107和第二滑杆104均向下运动,第二弹簧105被压缩,当异形块107向下运动与同侧的摆块1011接触时,使得同侧的摆块1011向外摆动,扭力弹簧1012扭转形变,从而带动第三转轴108转动,进而带动挡板109向外摆动,使得挡板109上破碎的石膏掉落下去,当第二电动推杆102的伸缩杆伸长至最大位置后,控制模块控制第二电动推杆102的伸缩杆静止三秒,三秒后,控制模块再控制第二电动推杆102的伸缩杆缩短至最小位置,从而连接块106向上运动,进而带动异形块107和第二滑杆104均向上运动,第二弹簧105复位,当异形块107向上运动与同侧的摆块1011不接触时,由于扭力弹簧1012复位带动同侧的摆块1011向内摆动,从而带动第三转轴108反向转动,进而带动挡板109向内摆动复位。
44.当控制模块控制第二电动推杆102的伸缩杆伸长至最大位置时,控制模块同时也控制第二减速电机112的输出轴转动,从而带动第四转轴113转动,进而带动粉碎刀组114转动,使得能对破碎的石膏再次粉碎,实现粉碎的效果,当控制模块控制第一电动推杆94的伸缩杆伸长时,控制模块同时控制第二减速电机112的输出轴停止工作。
45.当距离传感器121检测到挡料块91与距离传感器121的距离值低于控制模块中的距离值时,控制模块控制第三减速电机123的输出轴转动,从而带动第五转轴124转动,从而带动凸轮125转动,当凸轮125凸起的部分与推块126接触时,使得推块126向左运动,从而带动右侧的滑块128向左运动,同侧的第三弹簧129被压缩,进而带动筛板1210向左运动,使得左侧的滑块128向左运动,同侧的第三弹簧129被压缩,而当凸轮125凸起的部分与推块126不接触时,由于第三弹簧129复位带动滑块128向右运动,从而带动筛板1210和推块126均向右运动,筛板1210左右运动能对粉碎的石膏进行筛选,较细的石膏粉则掉落到基座1上,较粗的石膏粉则留在筛板1210上,实现筛选的效果,而当距离传感器121检测到距离值高于控制模块中的距离值时,控制模块控制第三减速电机123的输出轴停止工作。
46.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1